| 【IoT】红外循迹避障小车 | 您所在的位置:网站首页 › 红外避障传感器电路图 › 【IoT】红外循迹避障小车 |
【IoT】红外循迹避障小车
|
说明
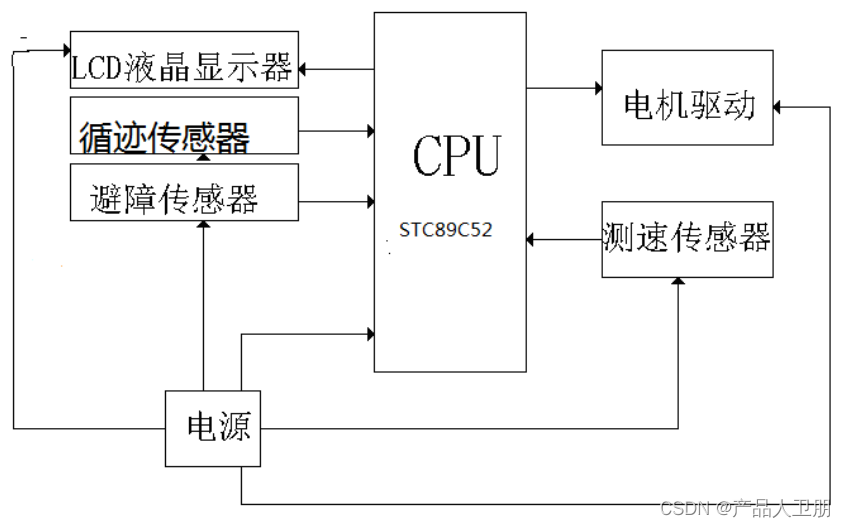
随着生产自动化的发展需要,机器人已经越来越广泛地应用到生产自动化上,随着科学技术的发展,机器人的传感器种类也越来越多,其中红外传感器已经成为自动行走和驾驶的重要部件。 红外的典型应用领域为自主式智能导航系统,机器人要实现自动避障功能就必须要感知障碍物,感知障碍物相当给机器人一个视觉功能。智能避障是基于红外传感系统,采用红外传感器实现前方障碍物检测,并判断障碍物远近。而利用红外对不同颜色物体反射强弱差别又可以实现循迹功能。 由于时间和水平有限,我们暂选最基本的避障,循迹功能作为此次设计的目标。 本设计通过小车这个载体再结合由STC89C52为核心的控制板可以达到其基本功能,再辅加由漫反射式光电开关组成的避障电路,基于PWM技术的转速控制、电源电路、电机驱动电路就可以完善整个设计。 功能概述智能小车采用前轮驱动,前轮左右两边各用一个电机驱动,分别控制两个轮子的转动从而达到转向的目的,后轮是万向轮,起支撑的作用。 避障部分,将3个红外线光电传感器分别装在车体的左中右,当车的左边的传感器检测到障碍物时,主控芯片控制右轮电机停止左轮转动,车向右方转向,当车的右边传感器检测到障碍物时,主控芯片控制左轮电机停止转动,车向左方转向,当前面有障碍物时规定车右转。而当小车同时有两个传感器接收到信号时,采用倒退方式转弯以避免碰到障碍物,于此同时测定速度并显示,在避障小车前进的同时从LCD点阵液晶显示器上显示小车当时速度和行驶的路程。 循迹部分,采用七个红外传感器置于车身前下方,中间五个主要用于循迹普通道路,外边两个略比中间的靠前,主要用来检测直角弯道。 车向左偏时右拐,右偏时左拐,左右拐又分为校正和转弯两档。遇到直角时极易冲出跑道,故给车施加一个反向脉冲。行驶过程中显示屏显示车速及路程。 硬件设计如下图所示,是本次设计智能小车的电路框图。 以STC89C52为电路的中央处理器,来处理传感器采集来的数据,处理完毕之后以便去控制电机驱动电路来驱动电机。电源部分是为整个电路模块提供电源,以便能正常工作。
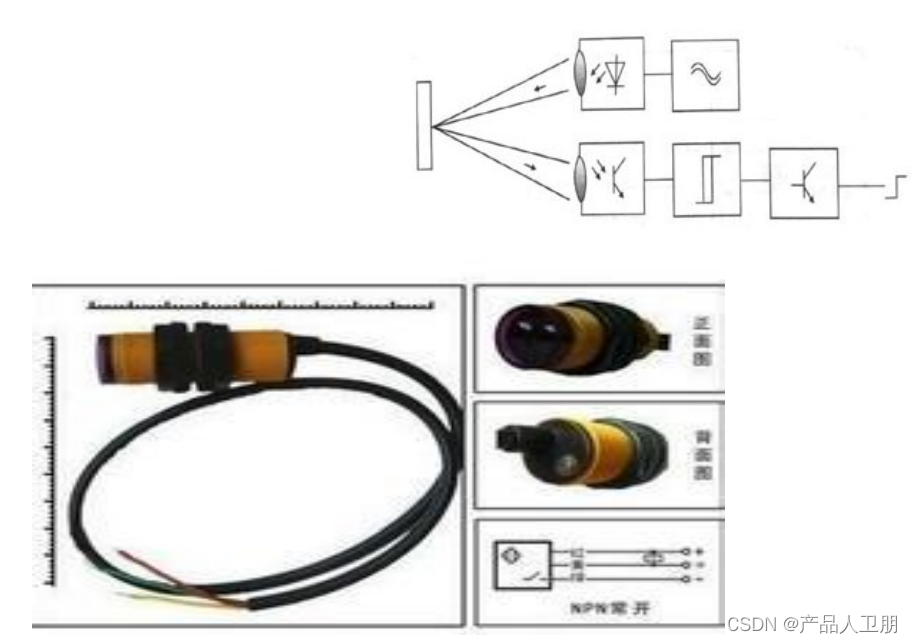
(1) 障碍物探测方案的选择 方案一:脉冲调制的反射式红外线发射接受器。由于采用该有交流分量的调制信号,则可大幅度减少外界干扰;另外红外线接受官的最大工作电流取决于平均电流。 如果采用占空比小的调制信号,再品均电流不变的情况下,顺势电流很大(50—100mA),则大大提高了信噪比。并且其反应灵敏,外围电路也很简单。它的优点是消除了外界光线的干扰提高了灵敏度。 方案二:采用超声波传感器,如果传感器接收到反射的超声波,则通知单片机前方有障碍物,如则通知单片机可以向前行驶。市场上很多红外光电探头也都是基于这个原理。这样不但能准确完成测量,而且能避免电路的复杂性 由以上两种方案比较可知。方案一要比方案二优势大,市场上很多红外观点探头也都基于这个原理。其电路简单,工作可靠,性能比较稳定。从而避免了电路的复杂性,因此我先用方案二作为小车的监测系统。 避障电路采用漫反射式光电开关进行避障。光电开关是集发射头和接收头于一体的检测开关,其工作原理是根据发射头发出的光束,被障碍物反射,接收头据此做出判断是否有障碍物。当有光线反射回来时,输出低电平;当没有光线反射回来时,输出高电平。单片机根据接收头电平的高低做出相应控制,避免小车碰到障碍物,由于接收管输出TTL电平,有利于单片机对信号的处理。 光电开关工作原理: 光电开关是通过把光强度的变化转换成电信号的变化来实现控制的。 光电开关在一般情况下,有三部分构成,它们分为:发送器、接收器和检测电路。
小车循迹原理是小车在画有黑线的白纸 “路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。 红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号,再通过LM324作比较器来采集高低电平,从而实现信号的检测。 避障亦是此原理。电路图如图3.4。 市面上有很多红外传感器,在这里我选用TCRT5000型光电对管。
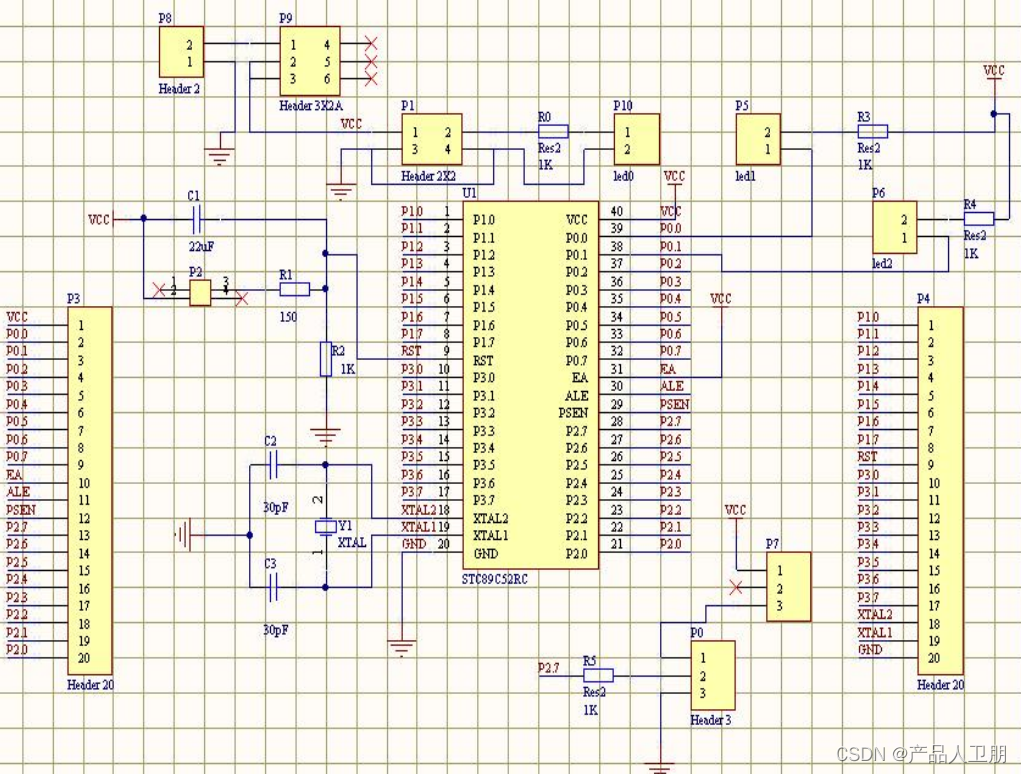
本设计的主控芯片选择STC89C52,负责检测传感器的状态并向电机驱动电路发出动作命令。 复位电路采用手动复位。 单片机电路如下:
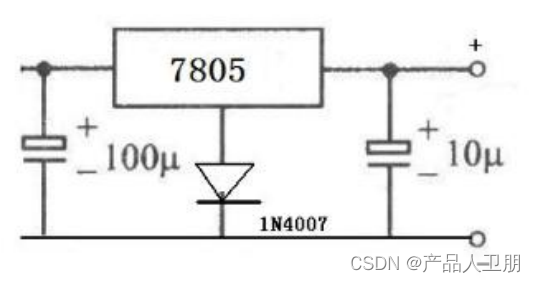
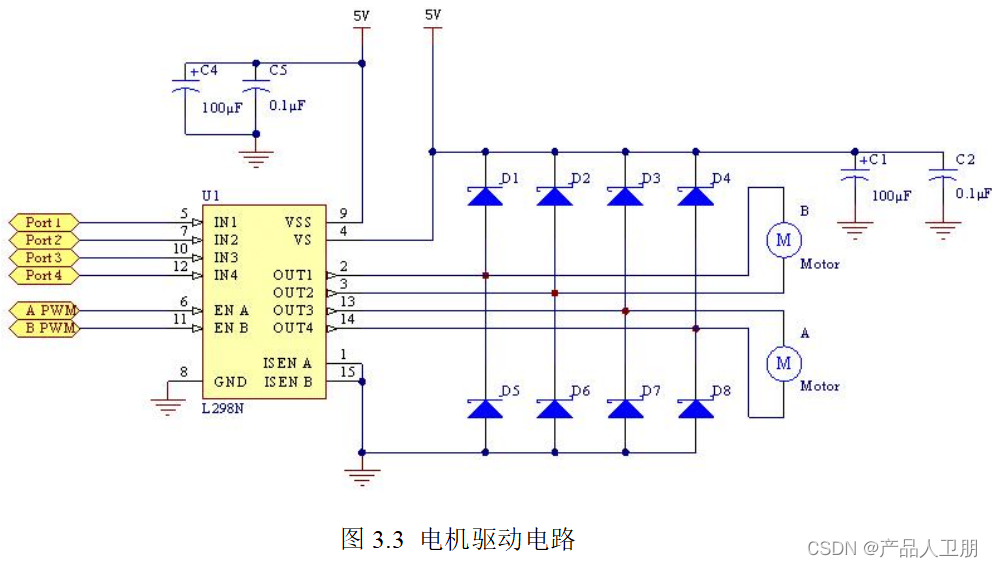
电机转速控制电路 转速控制采用基于PWM技术的脉冲调制技术,通过单片机输出两列PWM信号,经过l298N对电机进行速度调控。 电源电路 本系统所有芯片都需要+5V的工作电压,而干电池只能提供的电压为1.5V的倍数的电压,并且随着使用时间的延长,其电压会逐渐下降,故采用了一个12v蓄电池,再用LM7805稳压芯片。 L7805能提供最大1A的电流,足以满足芯片供电的要求。虽然微处理器和微控制器不需要支持电路,功耗也很低,但必须要加以考虑。 电源电路拟定为:
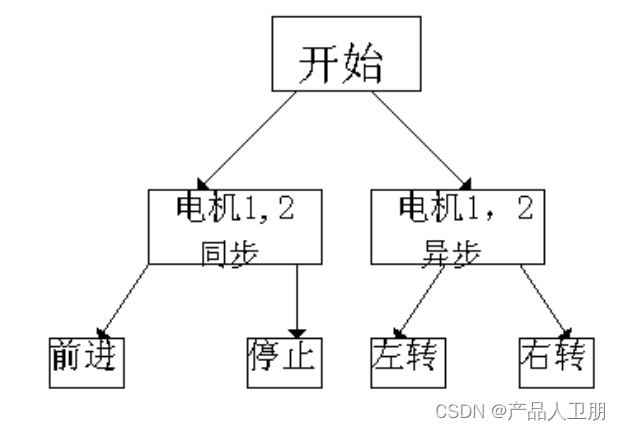
市场上用很多种类的小电压直流电动机,很方便的选择到。主要有普通电动机、和步进电动机。 方案一:采用步进电机,步进电动机的一个显著的特点就是具有快速启动和停止能力,能够达到我们所要求的标准。如果负荷不超过步进电机所能提供的动态转矩值,就能够立即是步进电机启动或反转。其转换灵敏度比较高。正转、反转控制灵活。但是步进电机的价格比较昂贵,对于我们的现状相差太远。 方案二:采用普通的直流电机。直流电机具有优良的调速特性,调速平滑、方便。调整范围广;过载能力强,能承受频繁的冲击负载,可实现频繁的无极快速启动、制动和反转。能满足各种不容的特殊运行要求。 由于普通直流电机价格适宜,更易于购买,并且电路相对简单,因此采用直流电机作为动力源 本设计采用L298N驱动使电机正反转从而做到前进,左转右转。 电机驱动一般采用H桥式驱动电路,L298N内部集成了H桥式驱动电路,从而可以采用L298N电路来驱动电机。通过单片机给予L298N电路PWM信号来控制小车的速度,起停。其引脚图如3.2,驱动原理图如图3.3。
|
 (2)信号检测模块
(2)信号检测模块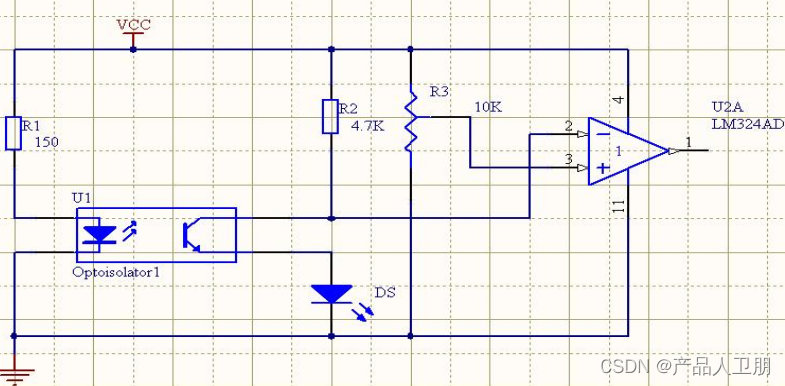
 电机驱动电路
电机驱动电路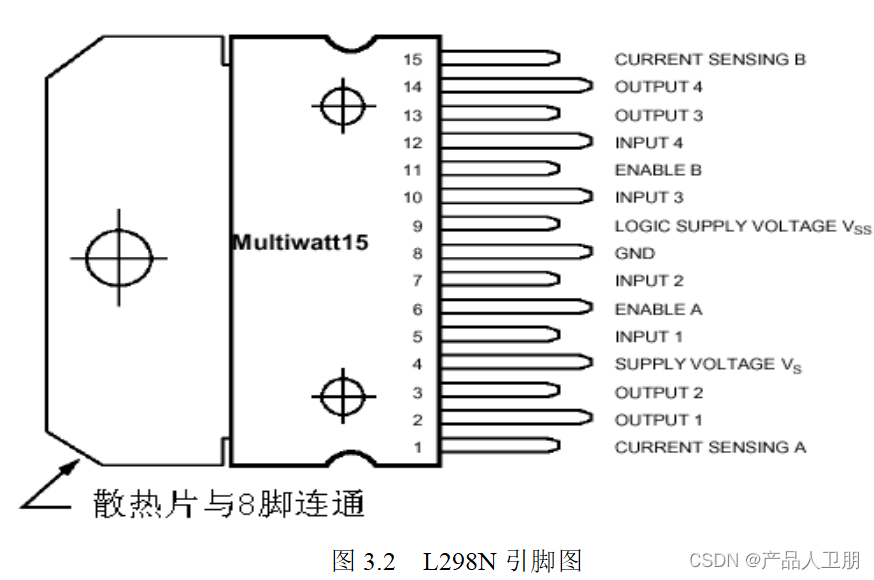
【本文地址】