| 陀螺仪与加速度计的姿态融合 | 您所在的位置:网站首页 › 简易融合用来出什么 › 陀螺仪与加速度计的姿态融合 |
陀螺仪与加速度计的姿态融合
|
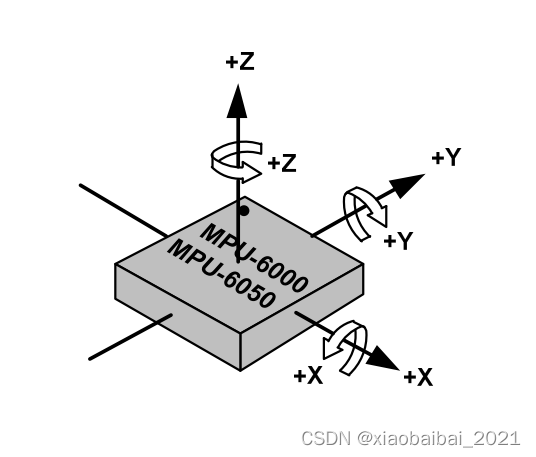
本篇文章我们来讲讲如何将陀螺仪和加速度计的数据结合起来,获取更准确的姿态数据,使用的是互补滤波的方法。 阅读本文需有一定的知识基础,可以参见作者以前MPU6050的两篇文章:《MPU6050陀螺仪和加速度计数据的获取和校准》、《MPU6050官方DMP的移植和使用》,以及了解四元数的一些基本概念。 1)为什么要进行姿态融合在之前的文章里,我们讲过一些陀螺仪和加速度计的知识,我们知道,陀螺仪可以获取载体的角速度,由角速度积分,就能得到角度,也就得到了载体的姿态。但是,陀螺仪给出的角速度存在测量误差、噪声和漂移,经过积分运算之后,会形成累积误差,这个误差会随着时间延长越来越大,最终导致偏差太大而无法使用。 另一方面,加速度计可以测量到地球的重力,当载体静止或者匀速运动时,重力的方向就是竖直向下的,通过测量重力加速度的方向,可以获取当前载体的俯仰角、滚转角。但是加速度计容易受到高频噪声的干扰,动态响应慢,只在长时间内数据比较有效。 因此,一般我们使用加速度计的数据来修正陀螺仪,以加速度计获取的实时姿态角来修正陀螺仪的累积误差,就能在短时间和长时间内都能获取比较满意的姿态信息。 我们以下图为例,Z轴向上,约定绕X轴旋转的角度为滚转角;绕Y轴旋转的角度为俯仰角,绕Z轴旋转的角度为偏航角。
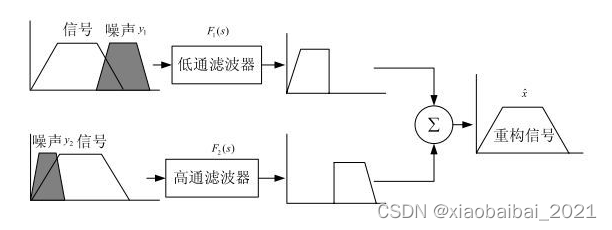
那么,滚转角(绕X轴转)和俯仰角(绕Y轴转)发生变化时,MPU6050测出来的重力加速度g的方向相对于载体也会发生变化。而加速度计测出来的重力加速度g的方向是实时的,不会受长时间计算累加的影响。所以,我们可以用加速度计测到的g的方向,来修正陀螺仪积分得到的滚转角和俯仰角。 而偏航角(绕Z轴转)变化时,MPU6050测到的重力加速度g方向是不会变化的,所以g的方向不能用来修正偏航角。要想修正偏航角,需要测量地磁偏角的传感器信息。 这个用加速度计或磁力计来修正姿态角的过程,一般称为数据融合,有多种方法实现。在之前的文章中,我们使用MPU6050芯片官方提供的DMP库直接获取了融合后的数据;但是这只适用于特定厂家的芯片,而更通用的方法是使用互补滤波或者卡尔曼滤波来实现,本节要讲的就是使用互补滤波的方法,来进行数据融合。 (注意,由于没有引入磁力计的数据,本文使用互补滤波的方法只是修正了俯仰角和滚转角的信息,无法修正偏航角,后续有机会再讲解如何用磁力计修正偏航角) 2)互补滤波的原理假如我们有两种途径测量某个信号,测得的结果一个带有高频噪声,一个带有低频噪声。我们为了获取更准确的信号,可以把它们的噪声分别滤掉,再合并,就得到了没有噪声的原始信号。具体操作如下图所示:
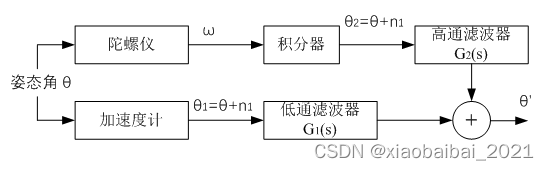
这就是互补滤波最基础的理论。 为了使得最后相加的重构信号与我们想要的信号尽量相等,一般要求F1(s)+F2(s) = 1。 具体到我们的实际问题,姿态信息可以通过陀螺仪角速度积分得到,也可以通过加速度计实时测量得到;而且,陀螺仪积分得到的姿态主要包含低频噪声(零偏、累积误差),加速度计得到的姿态主要包含高频噪声。使用互补滤波正好可以融合二者的姿态信息。 依据上面这个框图,我们可以想到以下的姿态融合方法:
图中ω是角速度,n1和n2为噪声,θ’为融合后的角度。 当我们把滤波器简化为最简单的一个比例系数时,有如下形式: 姿态角 = k*陀螺仪姿态角 + (1-k)*加速度计姿态角 (其中0 |
【本文地址】