| 姿态解算进阶:姿态矩阵更新 | 您所在的位置:网站首页 › 磁链计算方法有哪几种 › 姿态解算进阶:姿态矩阵更新 |
姿态解算进阶:姿态矩阵更新
|
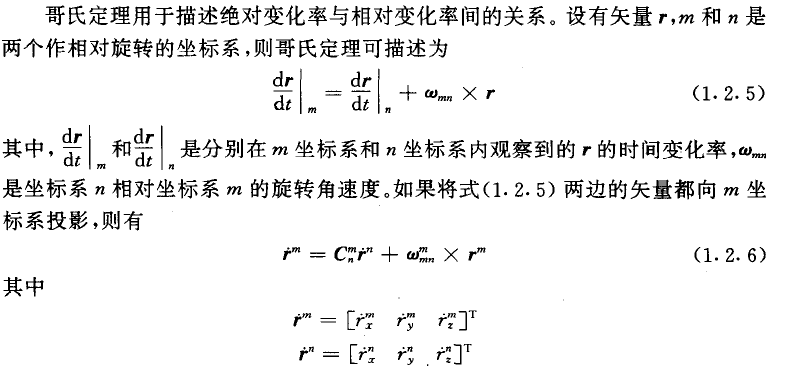
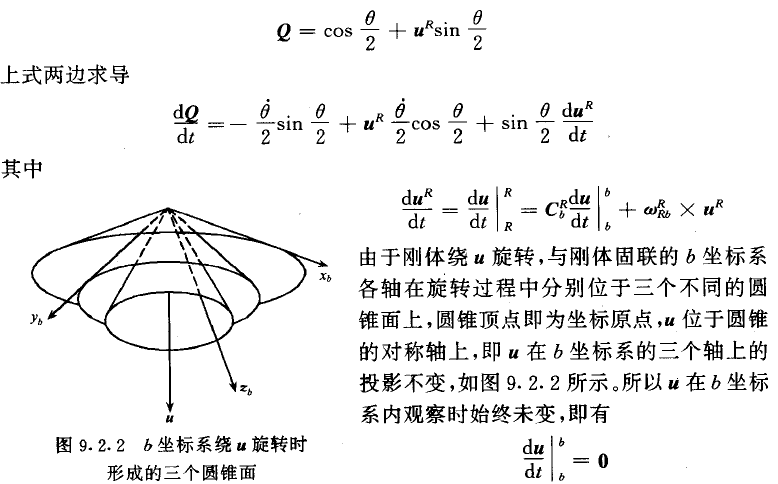
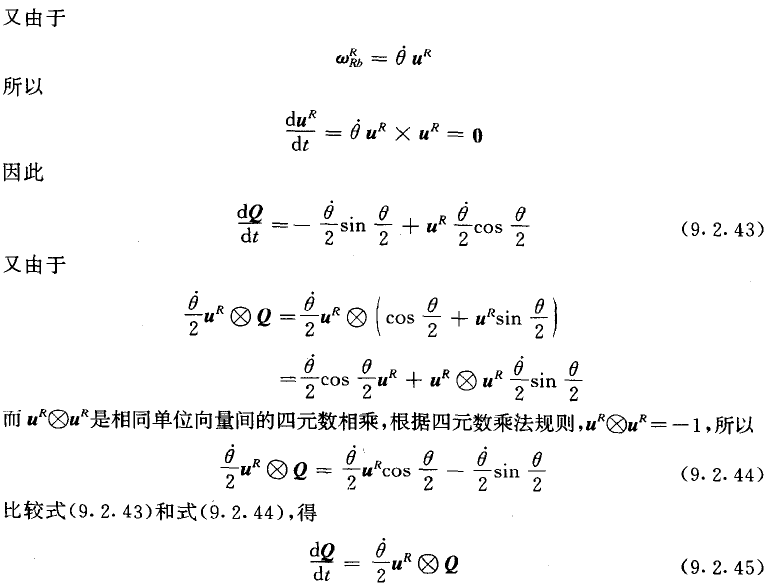
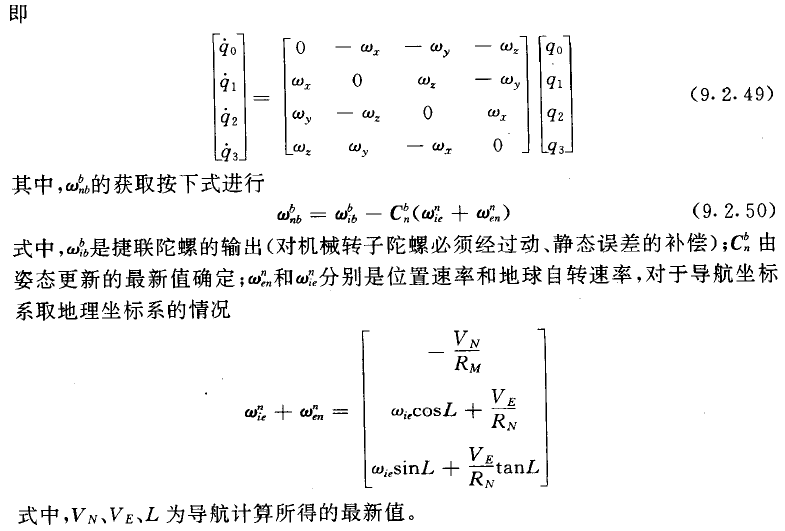
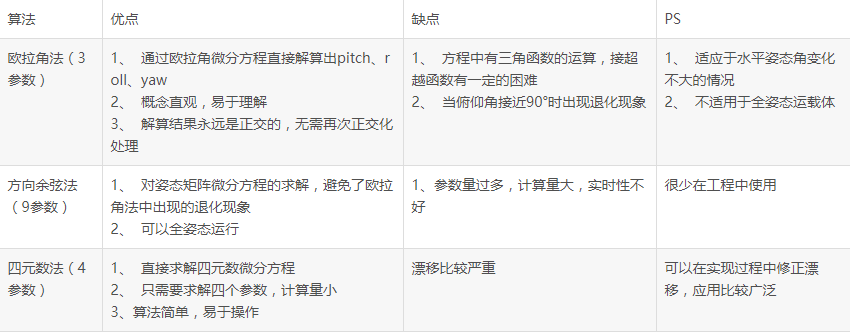
上一节中我们介绍了姿态矩阵有三种表示方式,分别是欧拉角、方向余弦、四元数,这一节我们来说说姿态矩阵的的更新。 欧拉角的优缺点: 优点:我们说过,用欧拉角表示方向(或者说,方向变换)只需要用到三个参数,即三个旋转角度(因为坐标轴是旋转轴,所以不用增加特别的参数描述旋转轴),这样做有一个非常大的优点,就是表述清晰易懂。 缺点:1)歧义问题。简单来说就是,当给定了欧拉角以后,我们很容易找到欧拉角表述的方向,但是当我们获得了一个方向以后,却不一定能求出它旋转的欧拉角。原因很简单,三维空间中的任意一个方向都可以通过至少两种不同欧拉角表示。比如,同样的yaw-pitch-roll顺序,(0,90,0)和(90,90,90)会将刚体转到相同的位置。2)欧拉角可能造成万向节死锁的问题,而要规避万向节死锁,需要选择合适的旋转顺序(有12种旋转顺序)3)欧拉角的插值比较难。因此,直接使用欧拉角的情况比较少。在此不介绍欧拉角的姿态矩阵跟新。 方向余弦所表示的姿态矩阵更新: 仅仅考虑刚体转动,由动力学知识可知,对于任意向量 其中e表示向量相对于地理(earth)坐标系,b表示相对于机体(body)坐标系,X 表示向量叉乘。 对于旋转矩阵 其中 由 四元数所表示的姿态矩阵更新: 1、哥式定理: 2、姿态矩阵更新: 在上一节中我们提到,表征b系到n系的四元数为: 三种算法比较: 在姿态解算过程中,到底用什么表示无人机的姿态呢?姿态表示的方法有很多种,比如欧拉角、四元数、DCM,各有的各的优势,比较常用的就是四元数,方便计算。下面介绍一个它们三个的优缺点。 参考:《惯性导航》秦永元 《多旋翼飞行器设计与控制》北航 全权 https://blog.csdn.net/qq_21842557/article/details/50993809 |
 求导(类比圆周运动v=rw):
求导(类比圆周运动v=rw):

 ,旋转矩阵中的向量满足:
,旋转矩阵中的向量满足:


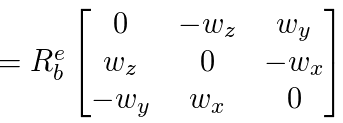
 ,定义旋转矩阵为:
,定义旋转矩阵为:
 叉乘关系,我们对旋转矩阵求导,可以得到:
叉乘关系,我们对旋转矩阵求导,可以得到:




【本文地址】