| 外骨骼机器人(一):Lokomat核心技术简介 | 您所在的位置:网站首页 › 瑞士核心技术 › 外骨骼机器人(一):Lokomat核心技术简介 |
外骨骼机器人(一):Lokomat核心技术简介
|
文章目录
一、Lokomat简介二、理论依据三、设计思路四、核心技术五、参考文献
一、Lokomat简介
下肢康复机器人临床上广泛用于由神经损伤以及其它疾病导致的下肢行走障碍患者,能够为因神经损伤导致行走功能障碍的患者提供了安全,有效的步行训练平台。通过机械腿带动患者完成大量重复的生理步态训练,让患者在早期即建立正确的运动模式,为今后重新正常行走打下良好基础。 Lokomat是一款机器人步态训练系统。用于因脑部损伤、脊柱损伤、神经性损伤、肌肉损伤和骨科疾病等原因造成步态异常的患者进行步态训练,并提高神经疾病患者的行动能力。 在中风或脊髓损伤后出现运动障碍的患者,可以通过加强运动训练来改善行走功能。在过去20年里,步态训练经常采用的一种方法是在跑步机上结合部分体重支持进行运动训练,这种训练方法叫做:Locomotor training. 如下图所示。这种治疗方法需要治疗师进行人工辅助。 以第一代Lokomat原型机的设计过程来说明整个系统的设计思路。第一代Lokomat原型机如下图所示,虽然与最新的Lokomat Pro相比,第一代看起来比较简单粗糙,但是其设计思路很值得学习。 2.DGO驱动式步态矫正器 2.1 DGO的设计思路 DGO(Driven gait orthosis)驱动式步态矫正器如下图所示: 2.2 DGO的驱动选型 每条腿有两个自由度,膝关节和髋关节。对这两个关节驱动器的要求是: 即使存在痉挛性肌张力亢进,膝关节和髋关节的驱动力也必须足够强才能带动腿部进行步态训练。同时矫形器应该易于操作,因此驱动器不应该太大或太重。 为什么只设计了膝和髋两个关节,而忽略了踝关节? 如果矫形器的设计目的是向前推动身体,那么移动踝关节所需的扭矩要大于髋关节和膝关节所需的扭矩。因此,在脚踝处省略了一个主动的驱动力,而是利用了移动的跑步机。在站立阶段,跑步机控制脚的运动,而在摇摆阶段,踝关节的背屈是通过被动抬脚器来实现的。 两个关节驱动设计参数如下表所示: 3.平行四边形机构 平行四边形机构如下图所示: 4.人机界面 人机界面最重要的目标是为了方便操作,主要实现了用户界面和患者数据库。 用户界面: 为了安全起见,对用户界面的编程做了如下规定,程序的每一步都是在程序的单独序列中指定的,治疗师必须在进行之前确认每一步。患者数据库: 患者数据库是用于存储关于患者的个人数据,以及不同调整的设置。对于新患者由于需要调整DGO,平均需要15分钟,而对于保存过数据的患者只需要5分钟时间。5.生物步态模式 实验发现,正常行走步态下,如果减重低于40%就会出现拖地现象,如果采用正常人跨越3cm障碍物的步态进行训练就能大大改善拖地现象。 下图是几种步态对比,第一张是髋关节角度,第二张是膝关节角度。normal表示正常人行走步态曲线;DGO表示正常人穿上DGO行走的步态曲线;DGO w. FC表示正常人穿上DGO跨越障碍的步态曲线。可以看出,采用跨越障碍物的步态时,大腿抬腿高度明显比正常步态要高。 下肢康复机器人的核心技术如下图所示: 2.减重策略 减重策略的发展历程如下图所示: 4.诊断评估 Lokomat可以通过内置传感器对肌张力等各种指标进行诊断与评估。 5.临床数据 Lokomat这么多年积累了大量的临床数据,这些数据不论是用于科研还是临床治疗,对Lokomat产品来说都是良性循环。这也是除技术壁垒之外,其他同类产品无法企及的最大壁垒。 五、参考文献[1] R. Riener, L. Lünenburger, I. C. Maier, G. Colombo, V. Dietz. Locomotor Training in Subjects with Sensori-Motor Deficits: An Overview of the Robotic Gait Orthosis Lokomat. [2] Gery Colombo, Matthias Joerg, Reinhard Schreier, Volker Dietz. Treadmill training of paraplegic patients using a robotic orthosis. |

 人工辅助的缺点很明显:治疗师的工作不符合人体工程学,体力消耗很大,从而导致治疗效率低、治疗的患者少,持续治疗时间短。另外,人工辅助治疗的效果不具有重复性,表现在两个方面,不同的治疗师辅助手法不一样;同一个治疗师不同时间段治疗效果不一样。 为了克服传统人工辅助的缺陷,开发了下肢康复机器人训练系统。与传统疗法相比,康复机器人可以进行更长时间、更密集的训练。机器人辅助跑步机训练还提供了在一次训练中提供客观反馈的能力,以及随着时间的推移监测功能改进的能力。
人工辅助的缺点很明显:治疗师的工作不符合人体工程学,体力消耗很大,从而导致治疗效率低、治疗的患者少,持续治疗时间短。另外,人工辅助治疗的效果不具有重复性,表现在两个方面,不同的治疗师辅助手法不一样;同一个治疗师不同时间段治疗效果不一样。 为了克服传统人工辅助的缺陷,开发了下肢康复机器人训练系统。与传统疗法相比,康复机器人可以进行更长时间、更密集的训练。机器人辅助跑步机训练还提供了在一次训练中提供客观反馈的能力,以及随着时间的推移监测功能改进的能力。 1.整体组成 第一代Lokomat的主要组成部分如下图所示,最新版Lokomat也包含了这些部分,只是具体的技术实现方式有所更新。
1.整体组成 第一代Lokomat的主要组成部分如下图所示,最新版Lokomat也包含了这些部分,只是具体的技术实现方式有所更新。 
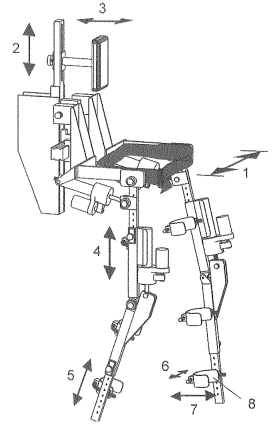 为了让DGO适用于不同的患者且容易调节,设计了8个可调自由度:
为了让DGO适用于不同的患者且容易调节,设计了8个可调自由度: 2.3 DGO的控制框架 DGO控制框架如下图所示:
2.3 DGO的控制框架 DGO控制框架如下图所示: 
 图中,由上到下依次是:DGO的连接装置、平行四边形机构、平行四边形机构的连接装置以及气动弹簧。 平行四边形机构的作用有三点:
图中,由上到下依次是:DGO的连接装置、平行四边形机构、平行四边形机构的连接装置以及气动弹簧。 平行四边形机构的作用有三点:
 1.步态控制 用的比较多的控制策略是阻抗控制,如下图所示:
1.步态控制 用的比较多的控制策略是阻抗控制,如下图所示:  基于阻抗控制发展出来的适应能力更强的一种控制策略是参考轨迹自适应控制,如下图所示:
基于阻抗控制发展出来的适应能力更强的一种控制策略是参考轨迹自适应控制,如下图所示: 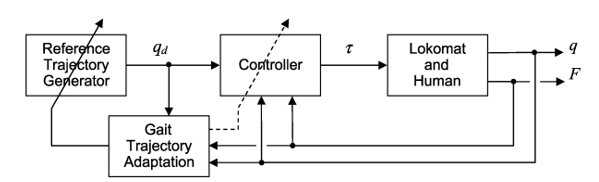 一种更先进的控制策略是path control,如下图所示:
一种更先进的控制策略是path control,如下图所示: 
 可以看出,只有在第一代Lokomat中采用了配重式的被动减重方式。而当前Lokomat最先进的减重策略是Levi专利技术,但是找不到任何公开的资料。介于两者之间的Lokolift的减重策略也非常复杂,结合了主动式减重和被动式减重的优点,在Lokolift产品中有所应用。 常见的几种减重策略如下图:
可以看出,只有在第一代Lokomat中采用了配重式的被动减重方式。而当前Lokomat最先进的减重策略是Levi专利技术,但是找不到任何公开的资料。介于两者之间的Lokolift的减重策略也非常复杂,结合了主动式减重和被动式减重的优点,在Lokolift产品中有所应用。 常见的几种减重策略如下图:  A是静态减重系统,B是被动动态减重系统,C是弹簧式被动动态减重系统,D主动动态减重系统,这四种减重方式各有各的优点和缺陷,不一一详述。 Lokolift的减重策略如下图,比较复杂就不详细展开了。
A是静态减重系统,B是被动动态减重系统,C是弹簧式被动动态减重系统,D主动动态减重系统,这四种减重方式各有各的优点和缺陷,不一一详述。 Lokolift的减重策略如下图,比较复杂就不详细展开了。  这套系统的控制框图如下:
这套系统的控制框图如下:  3.生物反馈 就是将训练结果进行量化与激励。
3.生物反馈 就是将训练结果进行量化与激励。【本文地址】