| 测量学2 | 您所在的位置:网站首页 › 测量的三大基本工作是什么 › 测量学2 |
测量学2
|
测量学
lesson 2:
高程测量:水准测量、三角高程测量、GPS高程测量。 水准测量是用水准仪和水准尺测定地面两点高差的测量工作。 水准测量我国采用黄海平均海平面作为高程为0的基准面(大地水准面),据此测定出青岛水准原点的高程为72.2604m。这个高程零点和原点称为“1985国家高程基准”。 根据这个基准,从青岛水准原点出发,用一、二等水准测量测定一系列水准点的高程,作为全国的高程基准。各地方在国家一、二等水准点的基础上,用三四等水准测量布设更多水准点进行加密。之后在三、四等水准点的基础上,可以进行图根水准测量(绘制地形图)和工程水准测量(工程建设)。 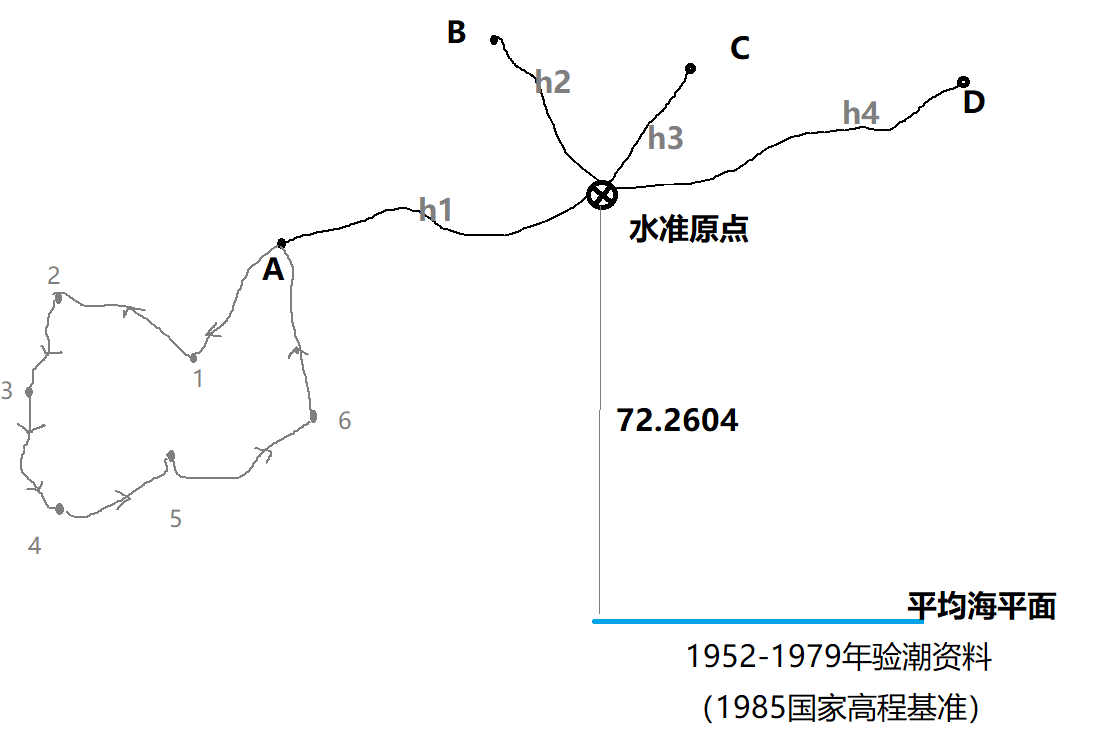 水准测量的基本原理
水准测量的基本原理
利用水准仪提供一条水平视线,对竖立在两地面点的水准尺分别进行读数,以测定两点间高差;再根据已知点的高程,推算待定点的高程。 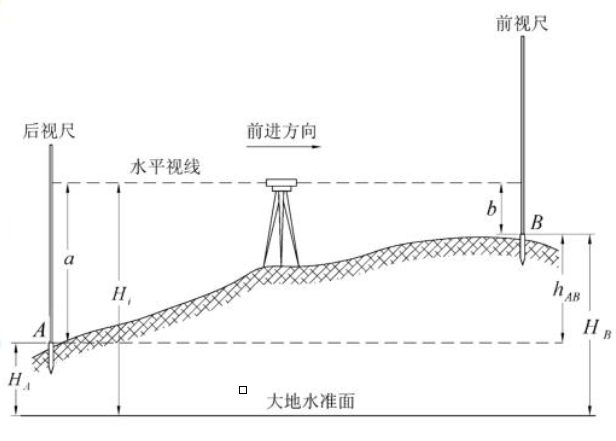
水平视线: H i = H A + a = H B + b H_i = H_A + a = H_B + b Hi=HA+a=HB+b 高差: h A B = H B − H A = a − b h_{AB} = H_B - H_A = a - b hAB=HB−HA=a−b 所以高差就等于后视读数 - 前视读数,即 a − b a - b a−b 后视读数大于前视读数,高差为正,B点比A点高 后视读数小于前视读数,高差为负,B点比A点低 水准测量的仪器 水准仪普通水准仪按精度可以分为DS05、DS1、DS3等。“D”、“S”分别表示“大地” 、“水准仪”,05、1、3为每公里往返测量高差中数的中误差(即往返测量一公里的高差闭合差)。 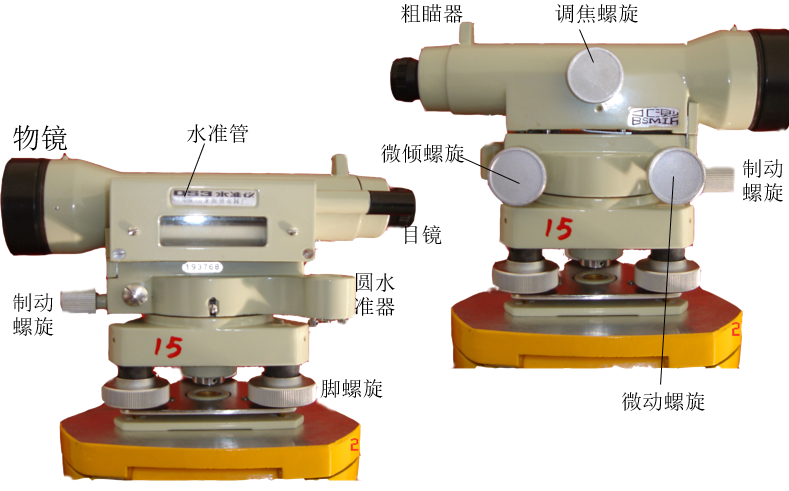
望远镜: 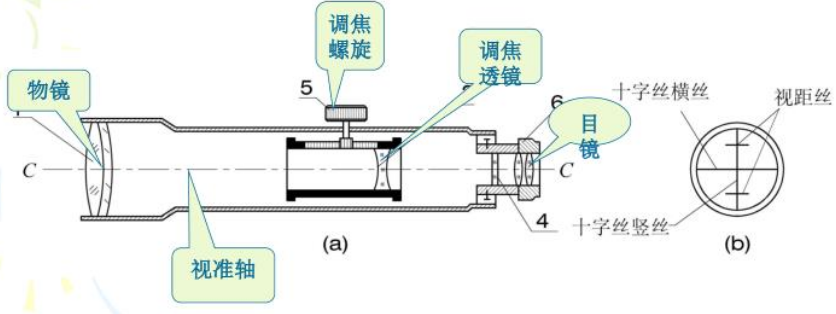
望远镜视准轴CC:物镜中心与十字丝焦点的连线。 十字丝分划板分为上、中、下丝,上下丝主要用于测量视距(仪器和水准尺的距离)。 视距 S = K L S = KL S=KL,K为视距常数,一般为100,L为上下丝读数之差 **视差:**由于物像没有和十字分划板重合,当人眼相对十字分划板相对移动时物像也和十字分划板相对移动,这种现象叫视差。 产生视差的原因是水准尺的实像与十字丝平面不重合。 消除视差的方法是:首先调整目镜调焦螺旋,使十字丝保持清晰;然后瞄准水准尺,调整物镜调焦螺旋,使物像清晰。 水准器: 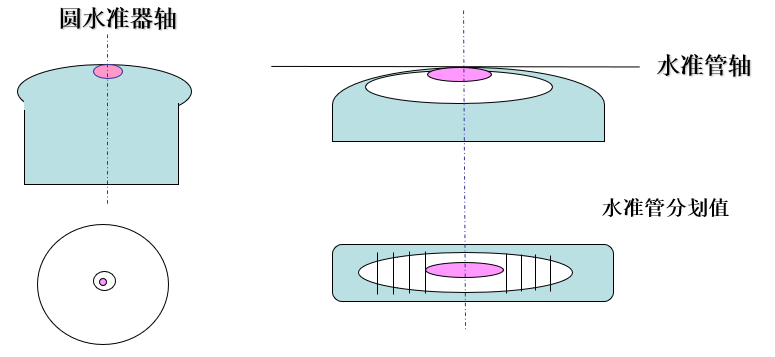
圆水准器用于粗平,粗平的目的是使仪器的竖轴基本处于铅垂位置,使管水准器可以精确整平。 管水准器用于精平,其目的是使水准管轴精确处于水平位置。 水准管轴:通过水准管零点的圆弧的切线 LL 圆水准器轴:通过圆水准器零点的球面法线 L’L‘ 自动安平水准仪: 
精密水准仪: 
电子水准仪:  水准尺及尺垫
水准尺及尺垫
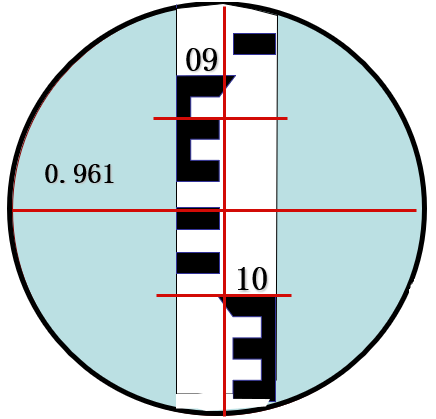
测量使用的水准尺有普通水准尺、精密水准尺(精密水准仪)和条码尺(电子水准仪)。 普通水准尺一般是黑红双面尺。双面尺的黑色面分划的零是从尺底开始,红色面的尺底是从某一数值(一般为4687mm或4787mm)开始,称为零点差。水准仪的水平视线在同一根水准尺上的红、黑面读数差应等于双面尺的零点差,可作为水准测量时读数的检核。 水准测量时水准仪多是倒像望远镜,如图: 连续水准测量中,转点起到传递高程的作用。 在连续水准测量时在转点处应放置尺垫,防止观测过程中因水准尺下沉而影响读数。 水准测量的程序安置——粗平——瞄准——精平——读数 安置水准仪(将水准仪安装到脚架上) 粗略整平(用脚螺旋或脚架使圆气泡居中) 瞄准水准尺(粗瞄-对光-精瞄-消除视差) 精确整平(用微倾螺旋使符合气泡影像居中) 读数(读取中丝所切的标尺高度) 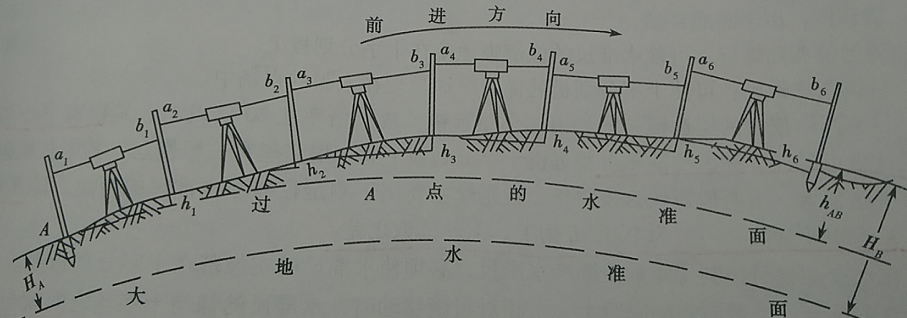
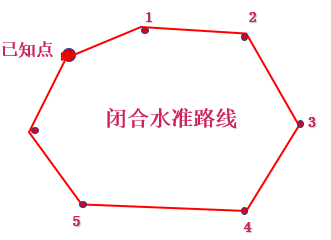
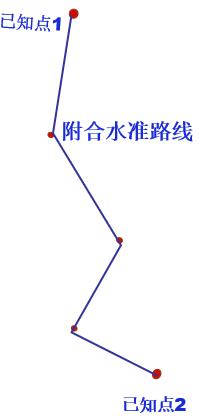
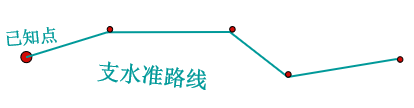
连续水准测量的一些要求: 中间立尺,减少地球曲率、大气折光以及 i i i角误差的影响每测段测站数为偶数,以消除两水准尺零点差的影响转点使用尺垫,踩实后再把尺放置在其凸起的半球体上,防止水准尺下沉带来误差记录员未宣布本测站合格,后视尺垫不能移动迁站后发现数据不合格重测 水准测量的施测水准测量外业工作包括:选点、埋石、观测高差。 水准点:用水准测量方法建立的高程控制点。 水准路线:在水准点之间进行水准测量所经过的路线称为水准路线。 附合水准路线闭合水准路线支水准路线(缺少检核条件,需要往返观测)水准网 水准测量方法:两次仪器高法、双面尺法。 两次仪器高法: 在每一测站设置两次仪器高,高度变换在10cm以上。取两次测量的平均值作为测站高差。 每一测站的观测顺序为:后——前——前——后。 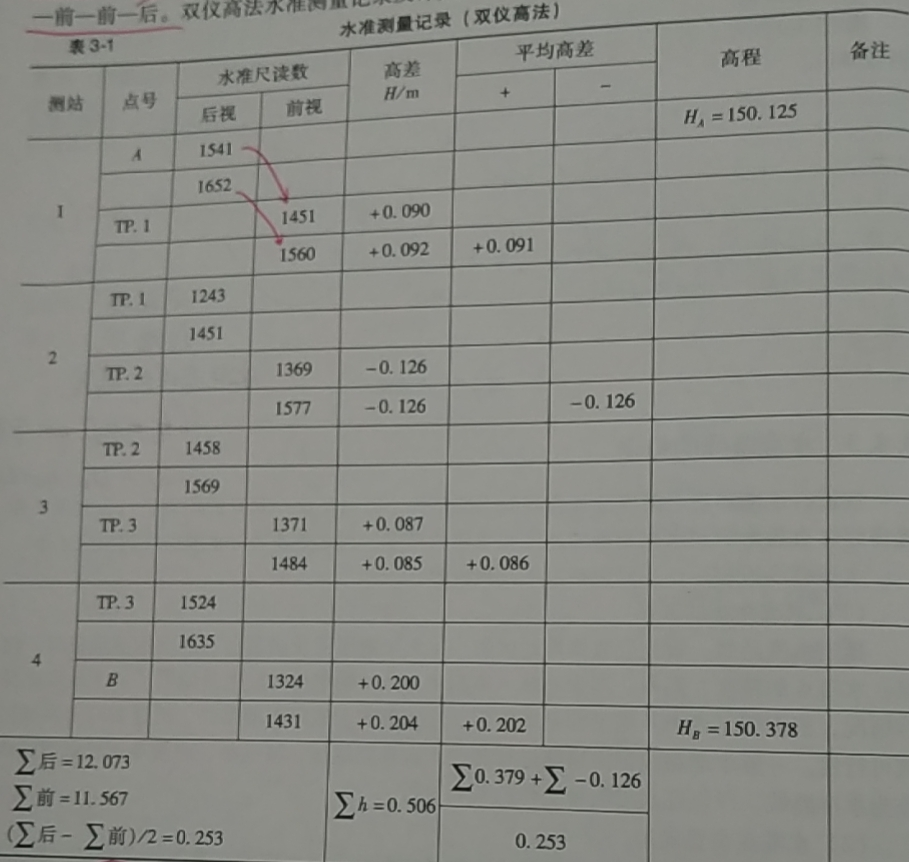
检核: ∑ 后 − ∑ 前 = ∑ h \sum 后 - \sum 前 = \sum h ∑后−∑前=∑h、 ( ∑ 后 − ∑ 前 ) 2 = ∑ h 2 \frac{(\sum 后 - \sum 前)}{2} = \frac{\sum h}{2} 2(∑后−∑前)=2∑h 双面尺法: 双面尺法不但可以用于普通水准测量,还可以用于三四等水准测量。 观测程序为: 往测时:后(黑)——前(黑)——前(红)——后(红) ①后尺黑面 瞄准–精平–读数(下、上、中) ②前尺黑面 瞄准–精平–读数(中、下、上) ③前尺红面 瞄准–精平–读数(中) ④后尺红面 瞄准–精平–读数(中) 返测时:前——后——后——前 水准测量外业记录表: 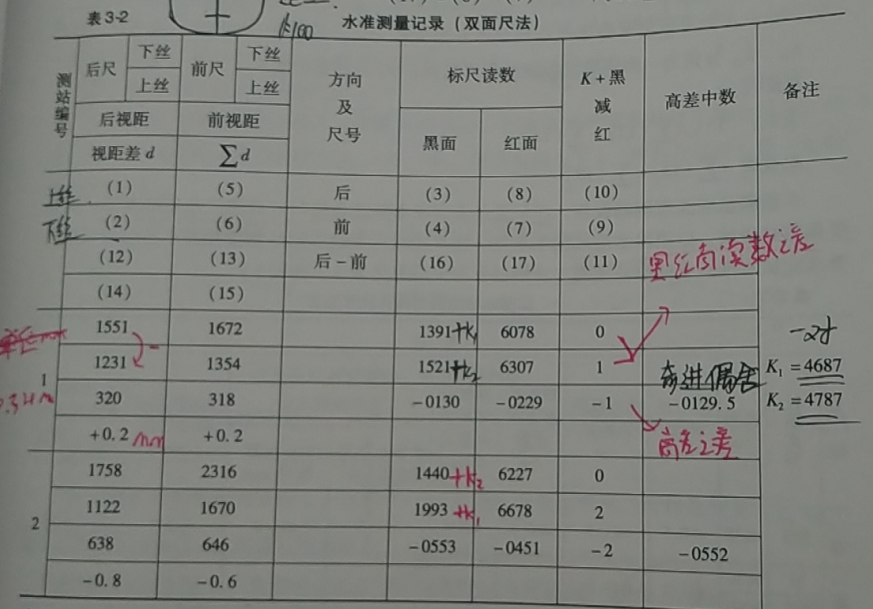
表格中读数估读到0.1mm,所以1551就是1.551m K 1 K_1 K1 = 4687 为第一测站后尺, K 2 K_2 K2 = 4787 为第二测站后尺 视距 = |下丝 - 上丝| 视距差 = 100 * (后视距 - 前视距),单位是m(带正负号) (四等小于3m) 累计视距差 = 本站视距差 + 前站视距累计差 (四等小于10m) 高差 = 后尺读数 - 前尺读数 (带正负号) 黑红面读数差 = K + 黑 - 红 (带正负号) (四等小于3mm) 黑红面高差之差 = 后尺黑红面读数差 - 前尺黑红面读数差 = 黑面高差 $\pm $ 100 -红面高差(带正负号) (四等小于5mm) 高差中数 = (黑面高差 + 红面高差 ± \pm ± 100) / 2(带正负号) 黑面都是从0刻度分划,算出高差是正确的高差;红面一个是4687一个4787,算出的高差±100才是正确的。 计算检核: 累计视距差 = ∑ 后视距 ( 12 ) − ∑ 前视距 ( 13 ) \sum 后视距(12) - \sum 前视距(13) ∑后视距(12)−∑前视距(13) 总视距 = ∑ 后视距 ( 12 ) + ∑ 前视距 ( 13 ) \sum 后视距(12) + \sum 前视距(13) ∑后视距(12)+∑前视距(13) h 黑 = ∑ 黑面后尺读数 ( 3 ) − ∑ 黑面前尺读数 ( 4 ) = ∑ 黑面高差 ( 16 ) h_黑 = \sum 黑面后尺读数(3) - \sum 黑面前尺读数(4) = \sum 黑面高差(16) h黑=∑黑面后尺读数(3)−∑黑面前尺读数(4)=∑黑面高差(16) h 红 = ∑ 红面后尺读数 ( 8 ) − ∑ 红面前尺读数 ( 7 ) = ∑ 黑面高差 ( 17 ) h_红 = \sum 红面后尺读数(8) - \sum 红面前尺读数(7) = \sum 黑面高差(17) h红=∑红面后尺读数(8)−∑红面前尺读数(7)=∑黑面高差(17) ∑ 后尺黑红面读数差 ( 10 ) = ∑ 黑面后尺读数 ( 3 ) + K − ∑ 红面后尺读数 ( 8 ) \sum 后尺黑红面读数差(10) = \sum {黑面后尺读数(3) + K} - \sum 红面后尺读数(8) ∑后尺黑红面读数差(10)=∑黑面后尺读数(3)+K−∑红面后尺读数(8) ∑ 前尺黑红面读数差 ( 9 ) = ∑ 黑面前尺读数 ( 4 ) + K − ∑ 红面前尺读数 ( 7 ) \sum 前尺黑红面读数差(9) = \sum {黑面前尺读数(4) + K} - \sum 红面前尺读数(7) ∑前尺黑红面读数差(9)=∑黑面前尺读数(4)+K−∑红面前尺读数(7) h 中 = ( h 黑 + h 红 ) / 2 = ∑ 高差中数 h_中 = (h_黑 + h_红) / 2 = \sum 高差中数 h中=(h黑+h红)/2=∑高差中数 水准测量的技术要求: 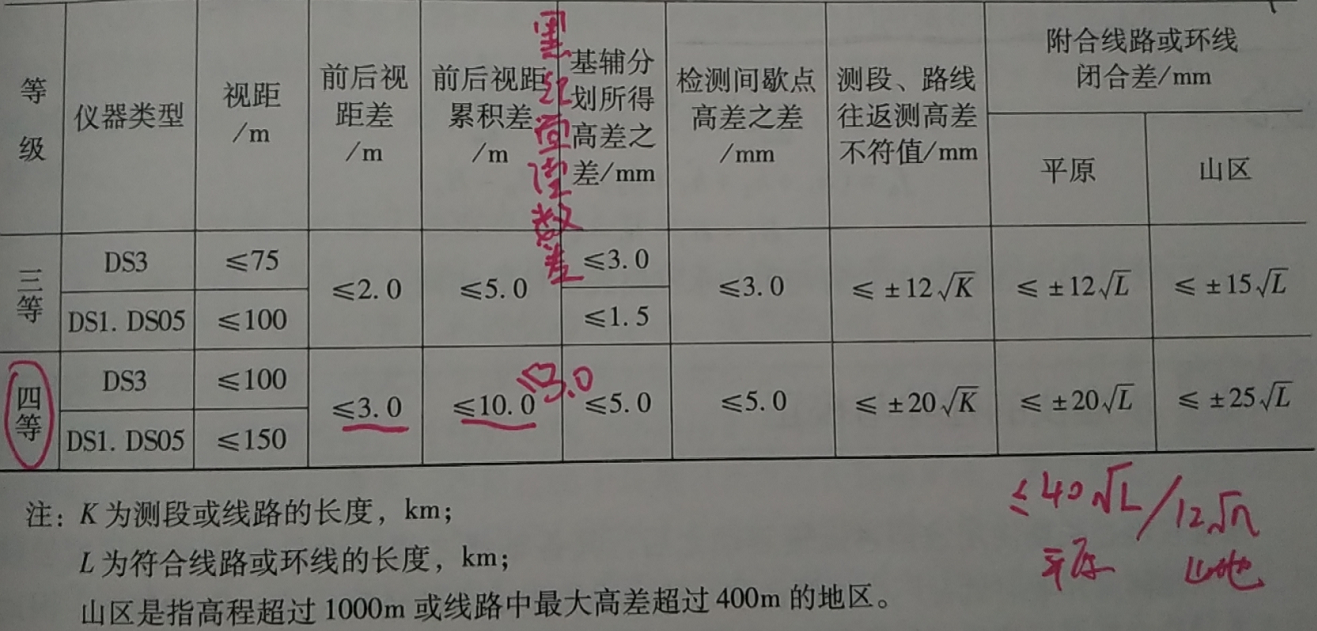
水准测量成果整理: 这个一个附合水准路线: 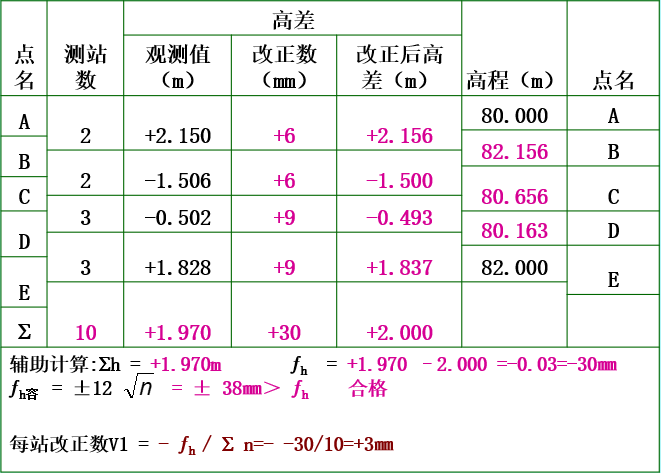
高差闭和差:在水准测量中,由于误差的存在,使得两点间的实测高差与其理论值不符,其差称为高差闭合差。 高差闭合差的计算:闭合差=观测值-理论值 闭合水准路线: f h = ∑ h 观 − 0 = ∑ h 观 f_h = \sum h_观 - 0 = \sum h_观 fh=∑h观−0=∑h观附合水准路线: f h = ∑ h 观 − ( H 终 − H 始 ) f_h = \sum h_观 - (H_终 - H_始) fh=∑h观−(H终−H始)闭合差限差:图根级规定如下: 平坦地区:$ f_{h容}= 40\sqrt L (㎜)$山区:$ f_{h容}= 12\sqrt n (㎜)$f h ≤ f h 容 f_{h} \leq f_{h容} fh≤fh容,则合格。L——路线长度,以km为单位;n——测站总数。 高差闭合差的分配:当限差满足时,高差闭合差的分配一般采用与水准路线长度或测站数成正比反号分配的原则进行。即每站(或每公里)高差改正数 : $V_1= - f_h / \sum n $ 或$ V_1= - f_h/ \sum S$ 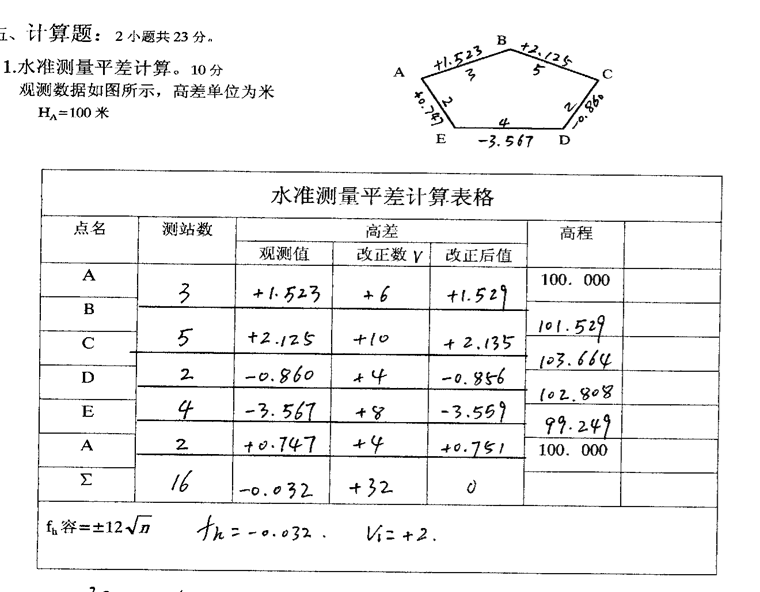 水准仪的检验和校正
水准仪的检验和校正
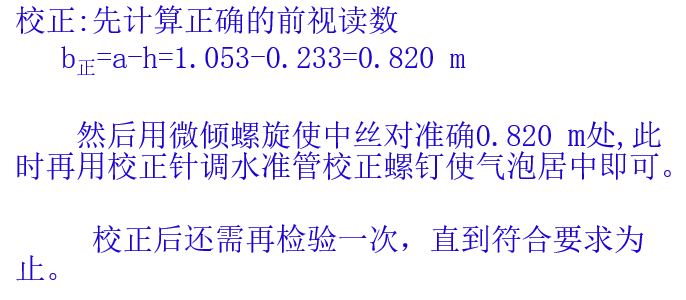
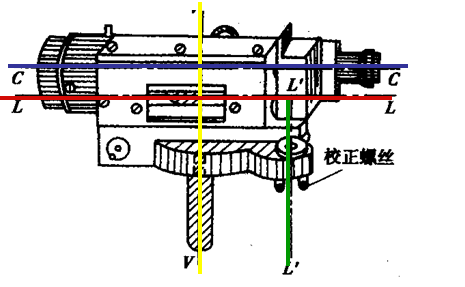
水准仪的主要轴线: 水准仪的轴线应满足的条件: 圆水准器轴应平行于竖轴(L’ // V)水准管轴应平行于视准轴(L // C)十字丝横丝应垂直于竖轴检验和校正: 圆水准器的检验和校正:使圆水准器轴平行于竖轴 检验:粗平后转180°,观察气泡偏离情况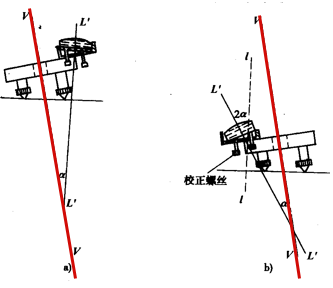 校正:转动脚螺旋,使气泡向圆水准中心移动偏距的一半,然后用校正针拨转圆水准地下的三个校正螺丝,使气泡居中。 校正:转动脚螺旋,使气泡向圆水准中心移动偏距的一半,然后用校正针拨转圆水准地下的三个校正螺丝,使气泡居中。 十字丝的检验和校正:使十字丝横丝垂直于竖轴 检验:用横丝瞄点或用竖丝瞄准锤球线看是否重合 校正:旋转十字丝分划板,使横丝与目标点重合。 校正:旋转十字丝分划板,使横丝与目标点重合。 水准管轴平行于视准轴的检验和校正(i 角误差):使水准管轴平行于视准轴 检验:设水准管轴不平行于视准轴,二者交角为 i i i, 在平坦地段量一段距离80m,定两点A和B,并立上水准尺。 先在中点安仪器,测出AB两点的正确高差 h A B = a 1 − b 1 h_{AB}=a_1-b_1 hAB=a1−b1 把仪器搬到离端点A或B约3m处安置,再测高差 h A B ′ = a 2 − b 2 h_{AB'} = a_2 - b_2 hAB′=a2−b2 若中点与端点所测高差相等,则i角为0,说明水准管平行于视准轴。 若不等,说明条件不满足,如果差值大于4㎜则要校正。(i角>20″则要校正, i = Δ h ⋅ ρ ′ ′ / D A B i=\Delta h \cdot \rho'' / D_{AB} i=Δh⋅ρ′′/DAB) 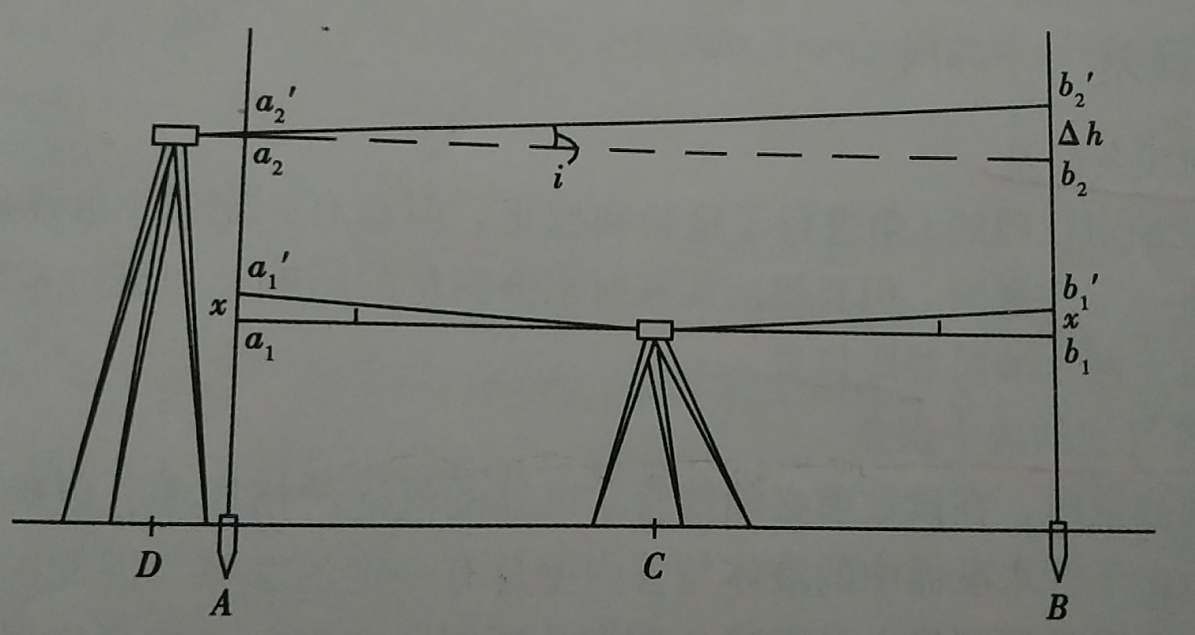 校正:在端点校正。先计算 b 2 正 = a 2 – h A B b_{2正} = a_2 – h_{AB} b2正=a2–hAB ,然后调微倾螺旋使中丝对准正确读数,此时水准管气泡不居中,再校正水准管。反复进行。 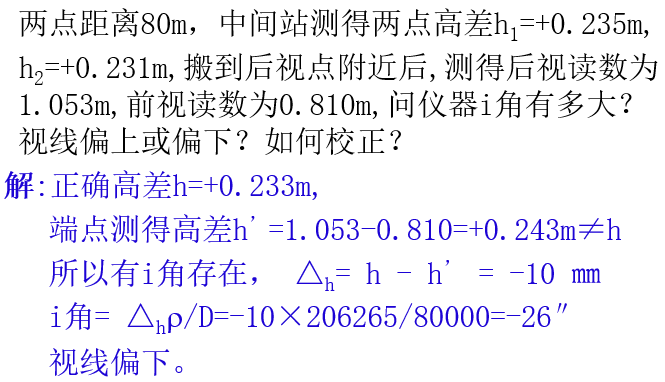
 水准测量的误差分析
水准测量的误差分析
误差来源分三个方面:仪器、人员、外界环境 仪器: i角的残余误差 (使前后视距大致相等,即通过居中观测来减弱) 水准管气泡居中误差 两水准尺零点误差 **水准尺的零点差:**从理论上讲,水准尺的零分划线应正好与尺底面重合。但事实上由于制造质量和长期使用的原因,两者往往不相重合。水准尺底面与零分划线不重合,称为水准尺零点误差。(两水准尺的零点误差对于连续连续两站的影响大小相等、符号相反,测站数为偶数的情况下可以减弱和消除该误差) 人员: 估读误差水准尺倾斜误差外界环境: 仪器和水准尺的下沉或上升误差 立在坚实的地面上,踩实脚架和尺垫加快观测速度每一站都采用“后前前后”的观测顺序大气折光 在日光照射下,地面温度升高,靠近地面的空气温度也相对升高,导致密度比上层空气稀薄,空气上下对流加剧,光线通过时容易产生折射,从而影响望远镜中水准尺的读数。越靠近地面影响越大。(在各级水准测量中规定了视线距离地面的最小高度,普通水准测量要求视线必须高出地面0.2m以上) 水准测量为什么要把仪器立在中间? 1.大气折光 2.i角误差(主要) 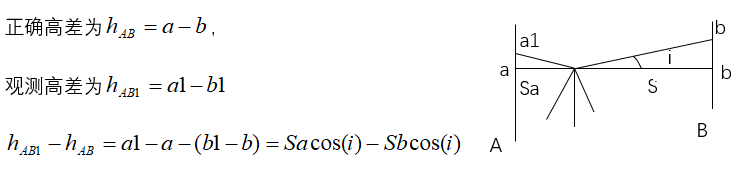
3.地球曲率 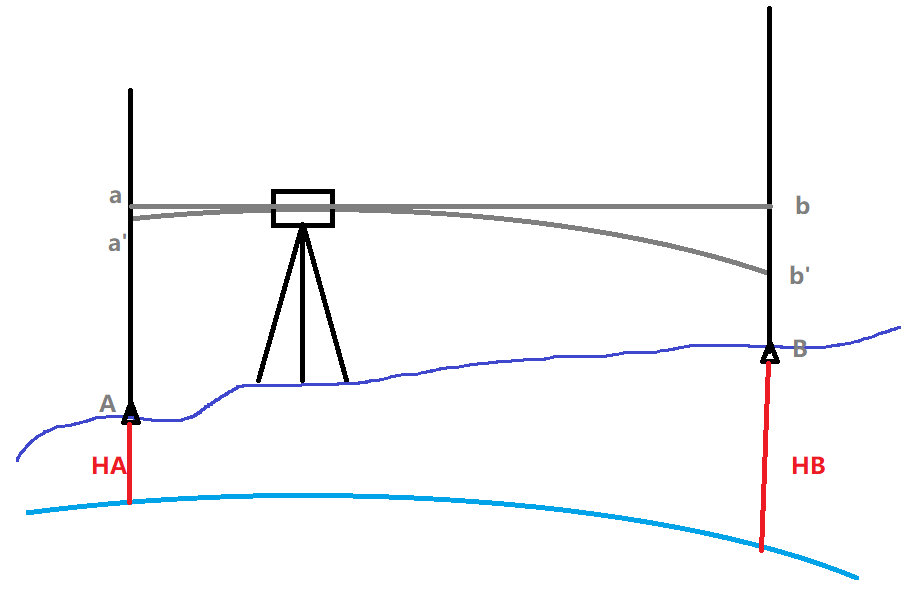
水平面代替水准面对高差的影响比较大 如果不立在中间,如图可以看出,实际上应该是: H A + a ′ = H B + b ′ H_A + a' = H_B + b' HA+a′=HB+b′ 但计算时我们用的水平视线: H A + a = H B + b H_A + a = H_B + b HA+a=HB+b h A B 实际 = a ′ − b ′ h_{AB实际} = a' - b' hAB实际=a′−b′ h A B 计算 = a − b h_{AB计算} = a - b hAB计算=a−b Δ = h A B 实际 − h A B 计算 = ( a ′ − a ) − ( b ′ − b ) \Delta = h_{AB实际} - h_{AB计算} = (a'-a) - (b'-b) Δ=hAB实际−hAB计算=(a′−a)−(b′−b) 根据地球曲率计算公式: $ (a’-a) = \frac{D_A^2}{2R} $ $ (b’-b) = \frac{D_B^2}{2R} $ 所以只要前、后视距相等(即 D A = D B D_A = D_B DA=DB),则 h A B 实际 = h A B 计算 h_{AB实际} = h_{AB计算} hAB实际=hAB计算,水平面代替水准面测量高差已无区别 |


【本文地址】