| 汽车雷达 | 您所在的位置:网站首页 › 汽车雷达行业 › 汽车雷达 |
汽车雷达
|
目录
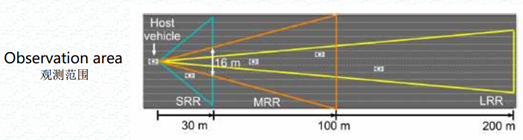
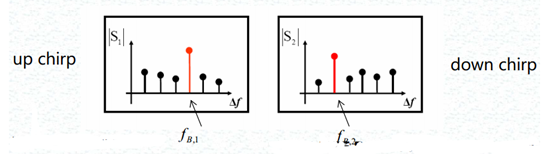
1、简介 2、发展史 3、技术参数 4、采用SIGe毫米波T/R组件 5、汽车雷达中主要的信号处理单元 5.1、远程雷达 5.1.1、总体框图 5.1.2、FFT 5.1.3、DOA估计 5.1.3.1 和差测角 5.1.3.2、顺序波瓣法 5.1.3.3、相位法测角 5.1.4 目标跟踪-线性卡尔曼滤波 1、简介汽车雷达作为驾驶员辅助系统的核心传感器(检测距离、速度);远距离雷达(LRR)是用来实现自动巡航(ACC),中距离雷达(MRR)用来实现侧向来车报警和车道变道辅助,近距离雷达(SRR)则是用来实现停车辅助、障碍和行人检测。 谈到其他的传感器技术能力,雷达最强悍的还是它能够在严酷的环境中工作(光线不好,环境较差,极端的温度);雷达需要有多个通道才能够支持角度测量;与其他机载传感器进行数字领域的数据融合; 参数 LRR MRR SRR 最大发射功率(EIRP) 55dBm -9dBm/MHz -9dBm/MHz 频率范围 76-77GHz 77-81GHz 77-81GHz 带宽 600MHz 600MHz 4GHz 探测距离范围Rmin~Rmax 10~250m 1~100m 0.15~30m 距离分辨率ΔR 0.5m 0.5m 0.1m 测距精度δR 0.1m 0.1m 0.02m 速度分辨Δv 0.6m/s 0.6m/s 0.6m/s 测速精度δv 0.1m/s 0.1m/s 0.1m/s 测角精度δψ 0.1° 0.5° 1° 方位波束宽度(3dB带宽)±ψmax ±15° ±40° ±80° 俯仰波束宽度(3dB带宽)±θmax ±5° ±5° ±10° 主要的信号处理包括:距离估计,多普勒频率估计、DOA(Direction of arrival)谱估计,目标跟踪。 5.1、远程雷达远程雷达的观测范围如下图所示。 远程雷达的主要参数: 参数 参考值 中心频率 24GHz/77GHz 扫描带宽 150MHz 速度分辨率 Δvr=2.25km/h 最大无模糊速度 Vmax=250km/h 距离分辨率 ΔR=1m 最大探测距离 Rmax=200m 处理时间 TCPI=10ms 功能:自动巡航(ACC),碰撞报警; 5.1.1、总体框图一些特殊的波形必须同时满足距离和径向速度测量。有以下几种波形: Pulse Doppler(脉冲多普勒); 三角、锯齿调频连续波; 频移键控(FSK)连续波; MFSK连续波; 下面给出一个单通道三角调频连续波雷达的框图: 应用于每段(chrip信号的上调频和下调频),频率和距离估计精度取决于FFT的点数,典型的点数值是128~4096点;
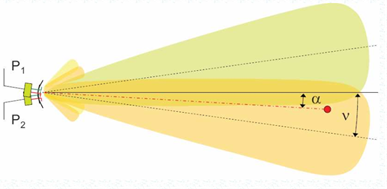
和差测角需要有两个波束指向不同的方向,和波束和差波束都将会被用上。其原理框图形式如下图所示。
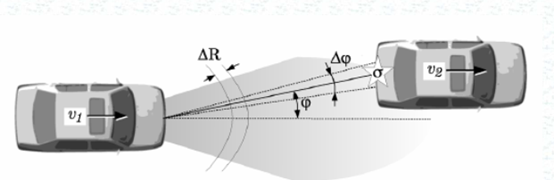
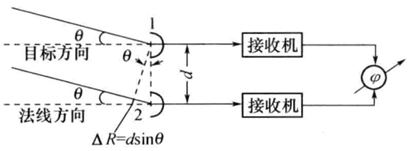
根据公式α=Σ/Δ ,Σ为和波束,Δ为差波束 ,根据下图可以得到和波束和差波束的比值α, 就可以得到值对应的角度。 顺序波瓣法通过选通对应的波束指向,根据目标在每个波束中返回的电平信息,来获得目标的角度信息。 如下图所示,因为目标与雷达天线之间的角度为θ,所以目标到天线1的时间与到天线2的时间相差了τ;τ与ΔR之间又存在对应的关系;最后通过相位检波的方法求出相位差φ,即可求得目标与雷达天线之间的夹角θ。 跟踪的流程图如下图所示。
|








【本文地址】