| 无人机动力学(牛顿欧拉法) | 您所在的位置:网站首页 › 欧拉方程的用途有哪些 › 无人机动力学(牛顿欧拉法) |
无人机动力学(牛顿欧拉法)
|
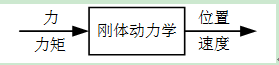
刚体动力学的输入以及输出如下图所示:
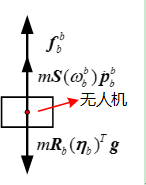
根据牛顿-欧拉公式可得: 式(1)中表示刚体的质量,表示本体坐标系下的线速度 ,表示本体坐标系下的角速度,表示外部的力;表示惯性矩阵,表示外部的力矩。 对应到无人机上,需要考虑无人机自身的质量,进行受力分析有: 根据上图中的受力分析有: 注意上式中的这一项是因为重力的方向是在世界坐标系(惯性坐标系),因此需要转换到载体(机体)坐标系下,这里的所有量都是在载体坐标系下进行分析的。表示欧拉角,表示从惯性坐标系到机体坐标系的旋转矩阵。这一项表示反对称阵,这里用这一项去代替叉乘。对应牛顿-欧拉公式(式(1))中的第一个公式,然后参照牛顿-欧拉公式第二个式子有: 因此通过式(2)以及式(3)可以得到无人机的动力学: 注意(4)中 |
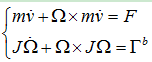 (1)
(1)
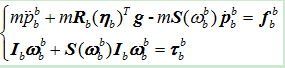 (4)
(4)【本文地址】
公司简介
联系我们