| 相机标定(棋盘格标定法) | 您所在的位置:网站首页 › 棋盘格设计理念是什么 › 相机标定(棋盘格标定法) |
相机标定(棋盘格标定法)
|
相机标定(棋盘格标定法)
1、相机标定
1.1、相机标定简介
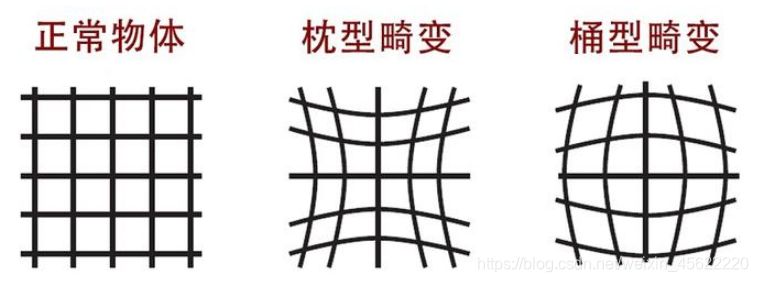
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定) 1.2、相机标定意义计算机视觉的基本任务之一是从摄像机获取的图像信息出发计算三维空间中物体的几何信息,并由此重建和识别物体,而空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定的,这些几何模型参数就是摄像机参数。在大多数条件下,这些参数必须通过实验与计算才能得到。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。因此,做好相机标定是做好后续工作的前提,提高标定精度是科研工作的重点所在。 1.3、相机标定作用1、相机在出厂之前都需要进行相机标定,用软件的方法校正生成的图像,避免拍摄出的图像产生桶形和枕形畸变 同步标定内部参数和外部参数,一般包括两种策略 光学标定: 利用已知的几何信息(如定长棋盘格)实现参数求解 自标定: 在静态场景中利用 structure from motion估算参数。 2.2、内参数相机的内参数是六个分别为:1/dx、1/dy、r、u0、v0、f。 dx和dy表示:x方向和y方向的一个像素分别占多少长度单位,即一个像素代表的实际物理值的大小,其是实现图像物理坐标系与像素坐标系转换的关键。u0,v0表示图像的中心像素坐标和图像原点像素坐标之间相差的横向和纵向像素数。 2.3、外参数相机的外参数是6个:三个轴的旋转参数分别为( |
 2、根据相机成像的几何模型,将世界坐标系中的3D物体映射到2D成像平面上 3、求解多个相机对之间的映射关系。
2、根据相机成像的几何模型,将世界坐标系中的3D物体映射到2D成像平面上 3、求解多个相机对之间的映射关系。【本文地址】
公司简介
联系我们