| MoveIt!机械臂控制 | 您所在的位置:网站首页 › 机械手臂一般出现什么问题 › MoveIt!机械臂控制 |
MoveIt!机械臂控制
|
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 MoveIt!机械臂控制——问题汇总及解决方案 前言一、创建机械臂模型二、启动MoveIt!三、运行ArbotiX节点四、工作空间规划五、启动机器人仿真环境六、Moveit控制Gazebo机械臂七、其他总结 前言本文是学习ROS机器人开发实践——MoveIt!机械臂控制部分所遇见的问题和解决方案,作为自己的笔记避免此类问题的踩坑,参考了多篇博文,就不列举了。 ROS版本:kinetic 过程中出现问题试一试:sudo apt-get update 一、创建机械臂模型代码如下: roslaunch marm_description view_arm.launch问题1 问题2 实现 代码如下: roslaunch marm_moveit_config demo.launch问题1 问题2 实现 代码如下: roslaunch marm_description fake_arm.launch问题1 实现 代码如下: roslaunch marm_planning arm_planning.launch rosrun marm_planning moveit_ik_demo.py问题1 实现 代码如下: roslaunch marm_gazebo arm_gazebo_control.launch rosrun marm_planning moveit_ik_demo.py问题1
实现 代码如下: roslaunch marm_gazebo arm_bringup_moveit.launch问题1 详细步骤参考链接: 点这里 七、其他问题1 将marm_planning功能包复制到自己的工作空间,编译出现以下类似问题: 问题2 将marm_gazebo功能包复制到自己的工作空间,编译出现以下类似问题: 解决方案 分析原因同问题1一样,代码如下: sudo apt-get install ros-kinetic-gazebo-plugins 总结记录过程艰辛,感觉有帮助的,希望点赞支持哦! |
 解决方案 这是joint_state_publisher包缺失导致的问题,代码如下:
解决方案 这是joint_state_publisher包缺失导致的问题,代码如下: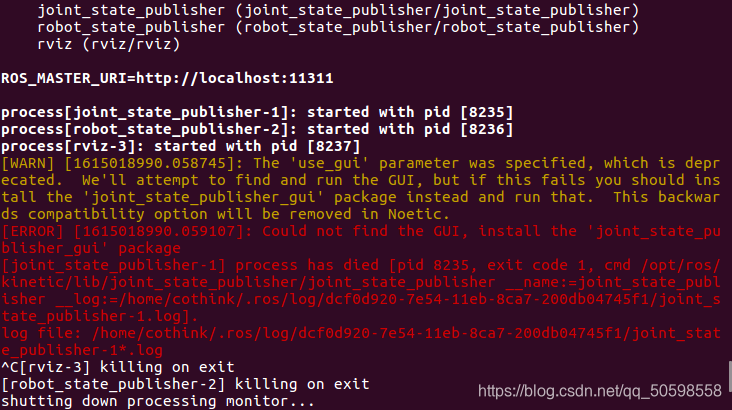 解决方案 joint_state_publisher_gui是刚更新出来的包,需要把之前的joint_state_publisher换成joint_state_publisher_gui,代码如下:
解决方案 joint_state_publisher_gui是刚更新出来的包,需要把之前的joint_state_publisher换成joint_state_publisher_gui,代码如下:
 解决方案 代码如下:
解决方案 代码如下: 解决方案 此类错误由于安装moveit的时候有些包没有安装完整,可以安装一遍moveit,代码如下:
解决方案 此类错误由于安装moveit的时候有些包没有安装完整,可以安装一遍moveit,代码如下:
 解决方案 安装 arbotix_python,代码如下:
解决方案 安装 arbotix_python,代码如下:
 解决方案 代码如下:
解决方案 代码如下:
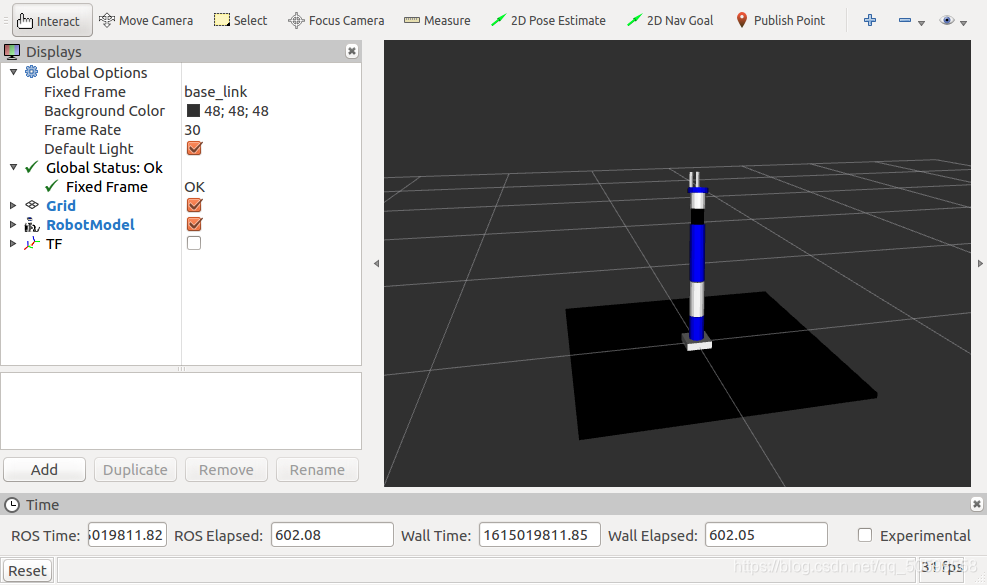
 解决方案 进到文件目录~/hh_ws/src/marm_description/urdf中,打开.xacro后缀的文件,在对应位置添 ,如下图所示。
解决方案 进到文件目录~/hh_ws/src/marm_description/urdf中,打开.xacro后缀的文件,在对应位置添 ,如下图所示。 问题2
问题2  解决方案 此问题可以忽略,参考链接: 地址.
解决方案 此问题可以忽略,参考链接: 地址.
 解决方案
解决方案 解决方案 上面的cmake错误表明安装同名的包或者更改环境,一般是没安装功能包,代码如下:
解决方案 上面的cmake错误表明安装同名的包或者更改环境,一般是没安装功能包,代码如下:
【本文地址】