| 最小二乘拟合二次曲线在STM32中的实现笔记 | 您所在的位置:网站首页 › 最小二乘抛物线拟合公式 › 最小二乘拟合二次曲线在STM32中的实现笔记 |
最小二乘拟合二次曲线在STM32中的实现笔记
|
传感器使用前要进行标定, 标定时必定需要进行曲线拟合。若用计算机处理很简单, 但实际中用微控制器中标定时, 只能进行一般的代数运算,无矩阵运算, 处理就显得非常不方便。最小二乘法推导了二次多项式曲线拟合待定系数的代数计算公式, 应用这些公式来处理数据非常方便。 设有一组实测数据(x i , yi)i =1 , 2 , … , n , 其拟合函数为 假定一种传感器的标准输入与输出曲线如图1(红色曲线)所示,由于环境以及外部干扰原因导致传感器输入与输出曲线发生偏移,如图1(蓝色曲线)。如果要得到传感器正确的数据就需要一条矫正曲线,将输入带有误差的曲线矫正成红色的标准曲线。首先我们要先确认误差曲线,如图2所示。红色为平滑后的曲线。 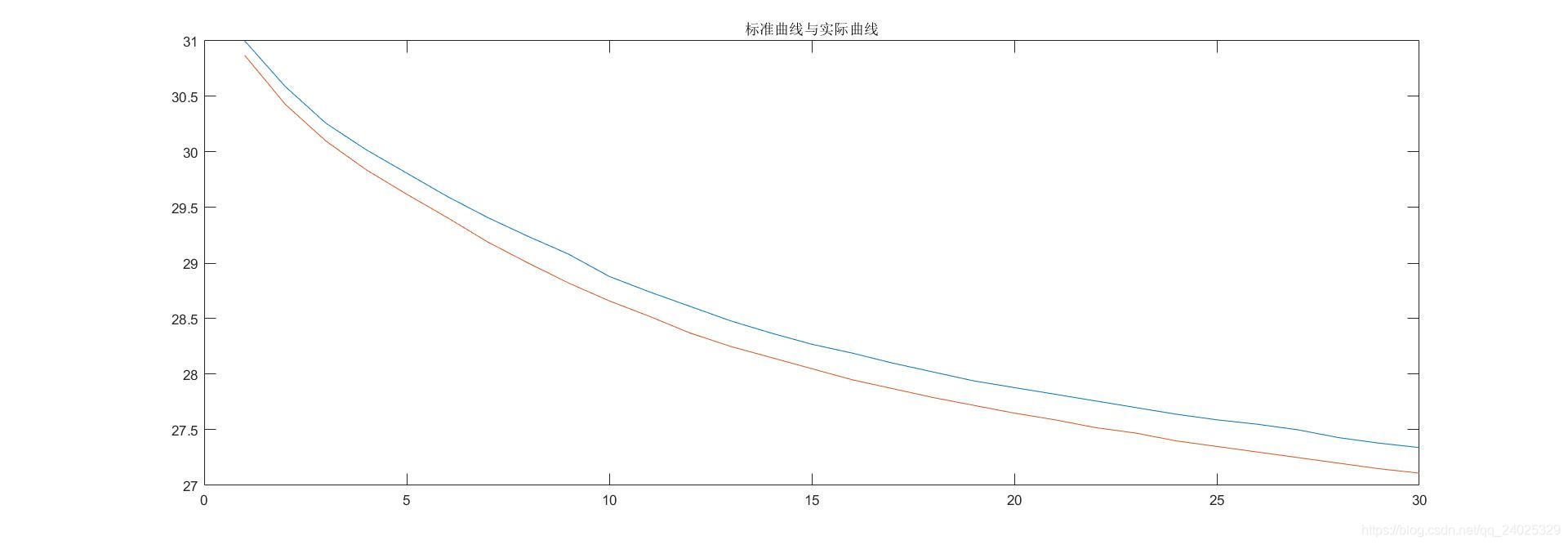 图1:标准曲线与实际曲线
图1:标准曲线与实际曲线
 图2:误差曲线
图2:误差曲线
MATLAB矫正过程简述如下: 将标准曲线导入MATLAB将现场采集到的误差曲线导入MATLAB取标准曲线和带有误差的曲线个7个数据计算误差(拟合曲线的输出)利用最小二乘法集合误差曲线F(标准输出) = F(现场输入)-F(误差)拟合后的曲线如图3所示:  拟合曲线
拟合曲线
MATLAB代码如下(可直接运行): %==============定义标准====================% a = [310.0 305.9 302.6 300.2 298.1 296.0 294.1 292.4 290.8 288.8 287.4 286.1 284.8 283.7 282.7 281.9 281.0 280.2 279.4 278.8 278.2 277.6 277.0 276.4 275.9 275.5 275.0 274.3 273.8 273.4]; a = a/10.0; %==============定义实际输入====================% b = [308.7 304.3 301.0 298.4 296.2 294.1 291.9 290.0 288.2 286.6 285.2 283.7 282.5 281.5 280.5 279.5 278.7 277.9 277.2 276.5 275.9 275.2 274.7 274.0 273.5 273.0 272.5 272.0 271.5 271.1]; b = b/10.0; bb = [b(1),b(5),b(10),b(15),b(20),b(25),b(30)];%需要拟合的数据,取输入的其中7个数据 %=============定义标准输出(为误差)=================% out = [a(1)-b(1),a(5)-b(5),a(10)-b(10),a(15)-b(15),a(20)-b(20),a(25)-b(25),a(30)-b(30)]; %=================一下为计算参数===================% b1 = sum(bb); b2 = sum(bb.^2); b3 = sum(bb.^3); b4 = sum(bb.^4); c1 = sum(out); c2 = sum(out.*bb); c3 = sum(out.*bb.^2); n=7;%拟合数据长度为 7 k = n*b2*b4 + 2*b1*b2*b3 - n*b3^2 - b1^2*b4 - b2^3;%%计算K a0 = ((b2*b4-b3^2)*c1 + (b2*b3-b1*b4)*c2 + (b1*b3-b2^2)*c3 )/k; a1 = ((b2*b3-b1*b4)*c1 + (n*b4-b2^2)*c2 + (b1*b2-n*b3)*c3 )/k; a2 = ((b1*b3-b2^2)*c1 + (b1*b2-n*b3)*c2 + (n*b2-b1^2)*c3 )/k; %%拟合函数%%%%% syms funb x0 funb = a0 + a1*x0 + a2*x0*x0;%%函数 %================误差曲线和平滑后的曲线============% error = a-b;%得出数据误差 t = 1:1:30;%定义横坐标 error_p = zeros(1,30);%定义空向量 for i=2:30 error_p(i) = error_p(i-1)*0.8 + error(i)*(1-0.8);%一阶低通滤波 end plot(t,error);%画误差曲线 hold on; plot(t,error_p);%画平滑误差曲线 figure; ezplot(funb,[27,38]);%画出拟合曲线二、在STM32中实现 自STM32F4系列推出之后,STM32已经带有DSP运算单元了,即使需要实时的曲线拟合,STM32也可以完全的胜任了。 计算代码如下: /* 显示函数 误差曲线拟合 其中 n 为需要拟合数据长度 其中g_dData 为待拟合的曲线数据(x) 其中g_dOut 为拟合曲线的输出(Y) */ void disposeHMI() { double b1=0; double b2=0; double b3=0; double b4=0; double c1=0; double c2=0; double c3=0; double n=0; double k=0; unsigned char i; unsigned int j; if(g_cUartData == 0xfe)//如果下发测量指令 { g_cUartData = 0;//清空 Bi = 0; delay_ms(200); Bi = 1; //=============================一下为拟合==========================// //=========================拟合数据为 1 5 10 15 20 25 30 ====7个数======// { n=7; //================一下计算BCk系数 for(i=0;i |
【本文地址】
公司简介
联系我们