| Camera基础知识 | 您所在的位置:网站首页 › 曝光的概念以及曝光的多少对影像明暗有什么影响 › Camera基础知识 |
Camera基础知识
|
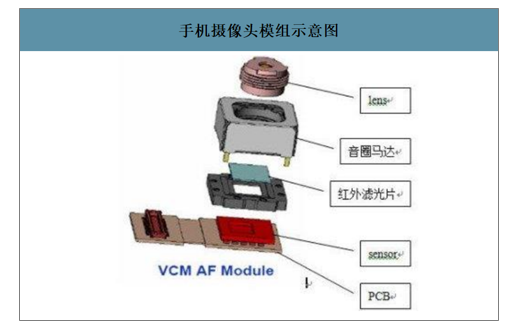
目录 前言 一、模组整体结构图 二、Camera成像原理 三、Lens介绍 四、VCM(Voice Coil Motor)音圈马达 五、红外滤光片 六、Sensor 七、PCB 前言本篇文章主要camera的一些基础知识,适用与所有从事camera相关工作的伙伴,以及对摄影知识感兴趣的人员。 一、模组整体结构图
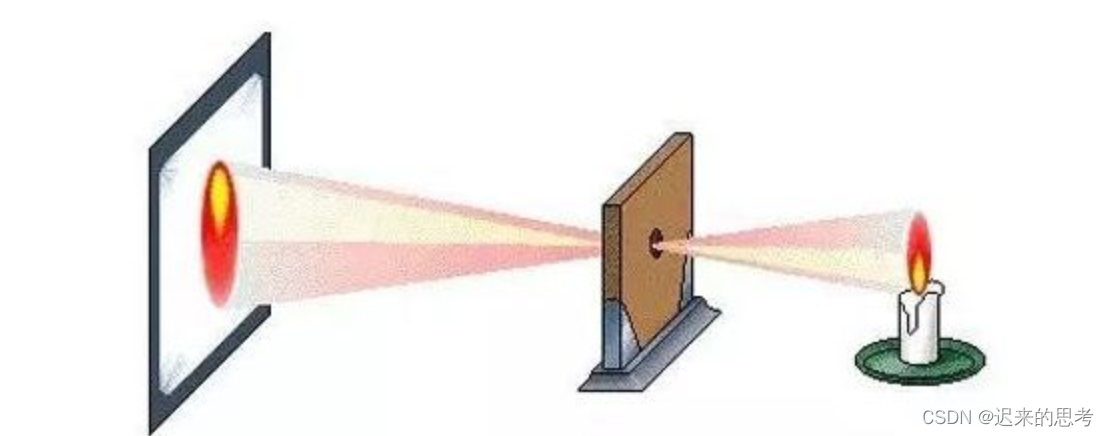
小孔成像原理
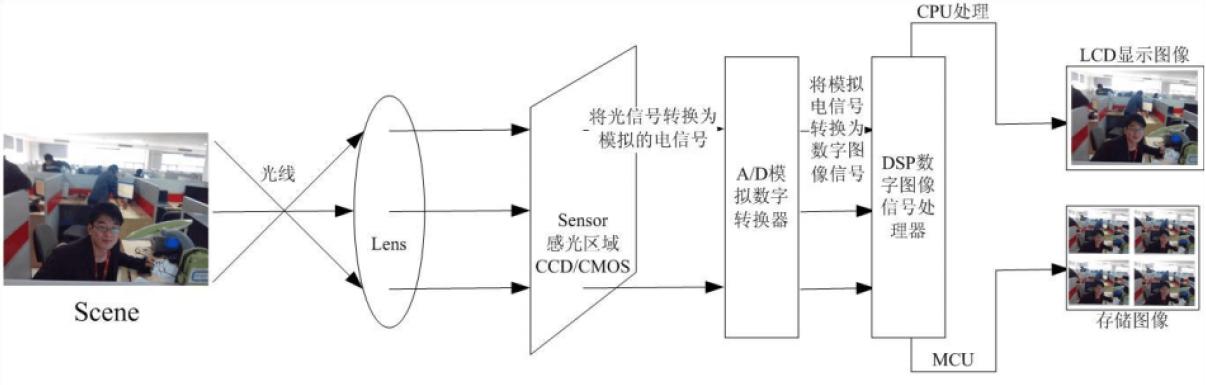
Camera实际工作原理 Camera工作原理是外部光线穿过 lens 后, 经过 color filter 滤波后照射到 Sensor 面上, Sensor 将从 lens 上传导过来的光线转换为电信号,再通过内部的 AD 转换为数字信号。如果 Sensor 没有集 成 DSP,则通过 DVP 的方式传输到baseband,此时的数据格式是 RAW DATA。如果集成 了 DSP, RAW DATA 数据经过 AWB、 则 color matrix、 lens shading、 gamma、 sharpness、 AE 和 de-noise 处理(手机一般在cpu isp端做),后输出 YUV 或者 RGB 格式的数据。最后会由 CPU 送到 framebuffer 中进行显示,这样我们就看到 camera 拍摄到的景象了。 三、Lens介绍Lens简介:摄像头镜头是整个camera模组最重要的组成部分之一,它决定了摄像头的成像效果。镜头的质量、焦距、光圈等参数都会影响摄像头的成像效果。 Lens的作用:汇聚光线,在CMOS/CCD上形成景物的图像,为了成像清晰,减少像差,镜头用多片镜片组合,根据需要通过调整LENS获得拍照所需要的焦距。 Lens主要参数介绍: 1、焦距
一般来说对于单片镜头就是镜头中心到焦点的距离,而相机镜头是由多片透镜组合,就要复杂许多。这里焦距就指的是从镜头的中心点到感光元器件(CCD)上所形成的清晰影像之间的距离。 焦距和视角、成像的关系:简单来说,就是焦距越短,视角越宽广,取景范围就越大,单个物体成像越小。
拍摄者站在同一位置用不同焦距拍摄的景物对比 从上图的比较可以看出17mm焦距较短,视野宽广,取景范围也大,容纳的景物多,景物个体较小。 相对应的300mm焦距较长,视野狭窄,取景范围相对要小,容纳的景物也少,景物个体比较大。
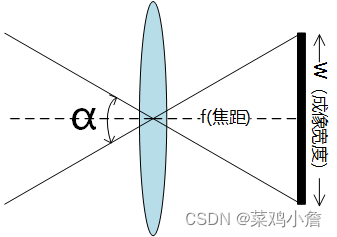
常见焦距对应的视觉范围 1、Fov FOV的全称是Field of View(视场角)。如下图所示,根据摄像头的成像原理的情况来看,每一个摄像头的成像宽度是固定的,对于不同的焦距,视场角α的值不一样的。对应的关系如下,焦距越长,视场角越小;焦距越短,视场角越大。对于视野范围来讲,焦距越长,视野范围也远;焦距越短,视野范围越短。
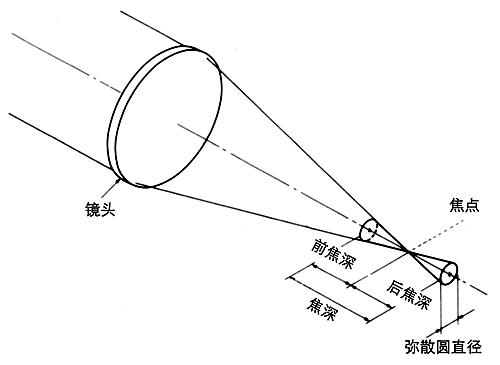
2、景深(depth of field) 当某一物体聚焦清晰时,从该物体前面的某一段距离到其后面的某一段距离内的所有景物也都相当于是清晰的。焦点相当清晰的这段从前到后的距离就叫做景深。
由相机的光圈大小、焦距、拍摄距离和相机感光元件的尺寸等因素决定。 景深越浅,被摄物体与背景的差异越明显,相机所能够拍摄的焦点范围也越小,而景深越深,则被摄物体与背景的差异越不明显,相机所能够拍摄的焦点范围也越大。 在摄影中,经常会利用景深来调整照片的效果,例如在人像摄影中,使用浅景深可以使人物的轮廓更加鲜明,同时还可以模糊背景,突出人物;而在风景摄影中,使用深景深可以使整个场景更加清晰,突出风景的细节。 调整相机的景深可以通过调整光圈大小、改变相机的焦距和拍摄距离等方法实现。在实际拍摄中,可以根据需要选择适当的景深范围,以获得理想的拍摄效果。 3、光圈 光圈英文名称为Aperture,光圈是一个用来控制光线透过镜头,进入机身内感光面的光量的装置,也是相机一个极其重要的指标参数,它通常是在镜头内。它的大小决定着通过镜头进入感光元件的光线的多少。表达光圈大小我们是用F值。 光圈的 f值 = 镜头的焦距 / 镜头口径的直径 从以上的公式可知,要达到相同的光圈f值,长焦距镜头的口径要比短焦距镜头的口径大。
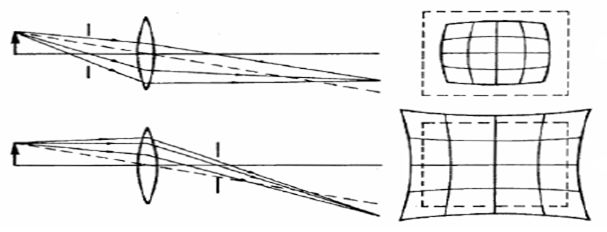
光圈的大小通常用f值来表示,例如f/2.8、f/4等。f值越小,光圈越大,摄入的光线越多,景深也越浅;f值越大,光圈越小,摄入的光线越少,景深也越深。 光圈的大小对相机的曝光量和景深有很大的影响。在室内或低光环境下,如果光圈太小,相机将无法摄入足够的光线,导致曝光不足;如果光圈太大,相机将摄入过多的光线,导致曝光过度。在拍摄时,根据需要可以调整光圈大小,以获得合适的曝光量和景深范围。 在摄影中,光圈的调整常常用于控制景深。较大的光圈可以使景深变浅,突出被摄物体,同时也能够模糊背景,使背景不分明;而较小的光圈可以使景深变深,使整个场景更加清晰,但也可能导致背景变得更加突出。 需要注意的是,不同类型的镜头可能具有不同的最大光圈,而光圈大小也会影响镜头的成本和重量。 4、畸变 像平面上不同位置有不同的放大率. 广角镜头容易产生桶形畸变。长焦镜头容易产生枕形畸变. 畸变与物像点离光轴的垂直高度的立方成正比,因此,物像四角的畸变比物像的四边的畸变程度大.
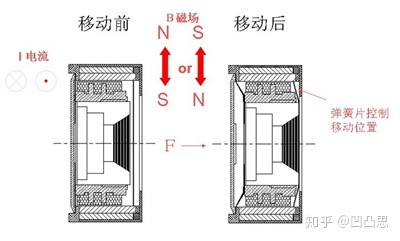
1、VCM概述:全称Voice Coil Montor,电子学里面的音圈电机,是马达的一种。因为原理和扬声器类似,所以叫音圈电机,具有高频响、高精度的特点。其主要原理是在一个永久磁场内,通过改变马达内线圈的直流电流大小,来控制弹簧片的拉伸位置,从而带动上下运动。手机摄像头广泛的使用VCM实现自动对焦功能,通过VCM可以调节镜头的位置,呈现清晰的图像。 2、VCM主要构件:
不同厂商的VCM结构略有差异,大致分几大部件如下: Shield Case:外壳 ;Frame:支架 ;F.Spacer:前垫片,用于绝缘; F.Spring:前簧片,用于承载载体,平衡力矩 ;Yoke:用于固定其他组件,导磁; Magnet:磁石,产生永久磁场 ;Coil:线圈,通电产生驱动力矩; Carrier:载体,用于承载镜头; B.Spacer:后垫片,用于绝缘; B.Spring:后弹簧,用于承载载体,平衡力矩 ;Base:底座,用于固定部件。 3、VCM作用:通过电感线圈产生不同方向和强度的磁场(弗莱明左手定则),
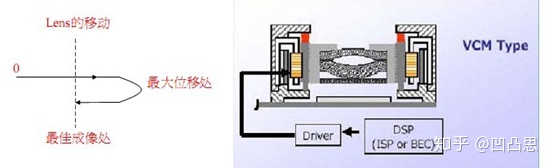
利用引力或斥力来推动镜头移动它靠簧片方式支持镜头伸缩,给Coil不同的电流,使Lens停在不同的点上面!手机摄像头的VCM需要Driver IC配合完成对焦,通过Driver IC控制VCM供电电流的大小,来确定VCM搭载的镜头移动的距离,从而调节到适当的位置拍摄清晰图像。镜头移动动作如下:
AF运行方式:进入自动调焦模式后,Driver从0到最大值,使得镜头从原地移动到最大位移处,此时sensor成像面自动拍摄图片并保存到DSP内,DSP通过这些图片,计算每一副图片的MTF(Modulation transfer function)值,从而在这条MTF曲线中找到最大值,并通过算法,得到这个点对应的电流大小,再一次指示Driver提供给音圈这个电流,而使镜头稳定在这个成像面,使得达到自动变焦。
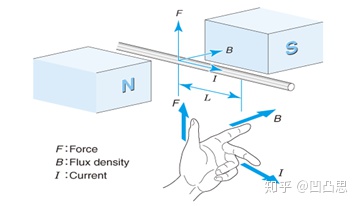
4、VCM工作原理:弗莱明左手法则。空中有一个磁场B,对横穿磁场的电线上通电,则电线上会产生力F。该力的强度公式为,F =BLI. 其中F:力[N];B:磁束密度[T];L:磁场中的电线长度[m];I:电流[A]。
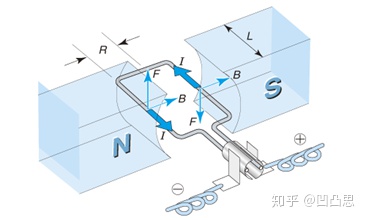
电线制成线圈,按图示方向通入电流I,则线圈的左侧、右侧会分别产生朝上、朝下的力,线圈开始旋转。这就是直流马达的旋转原理。
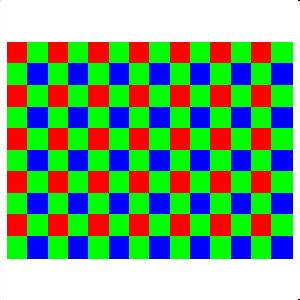
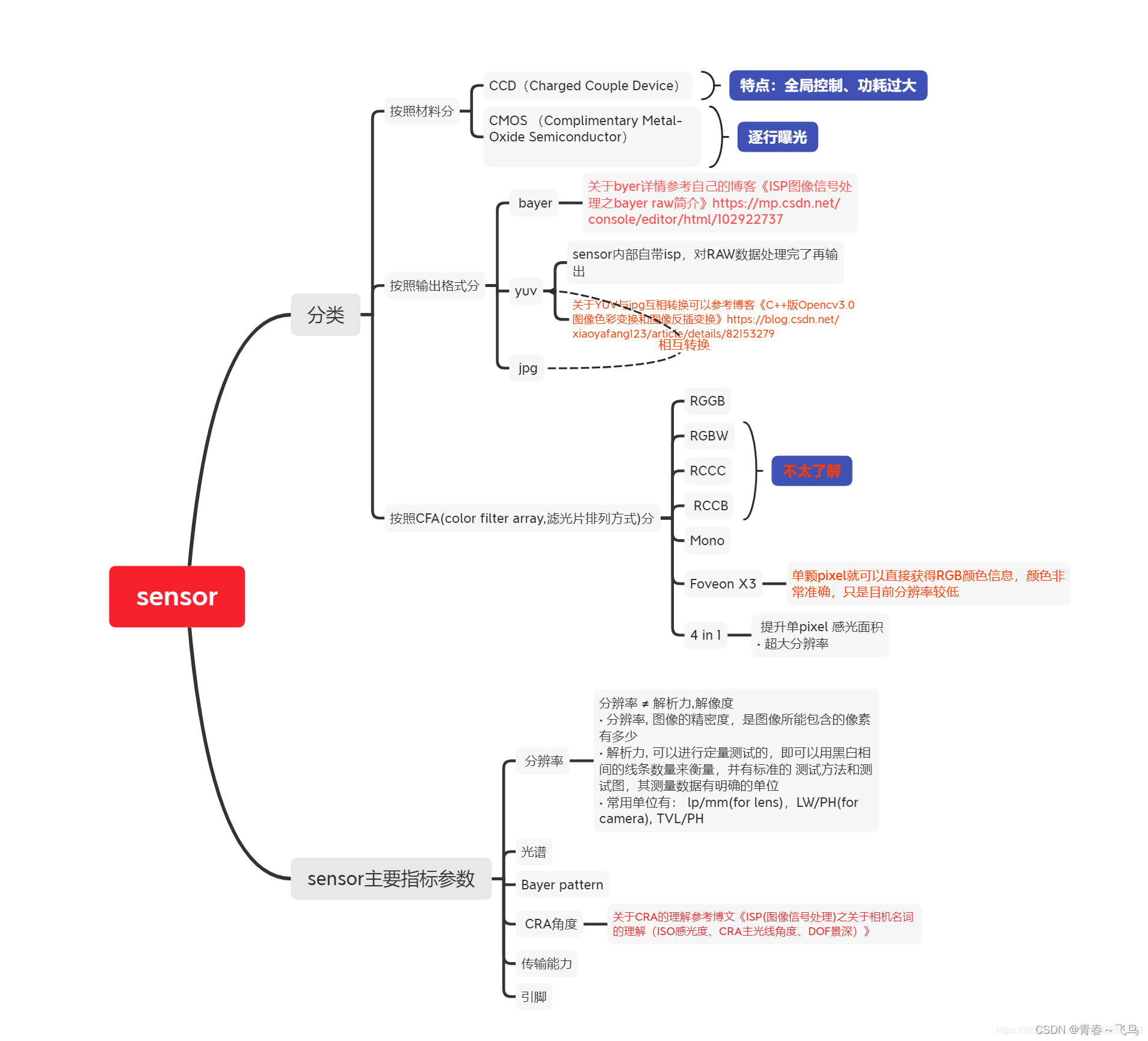
T =2RF = 2RNBLI; 其中T:扭矩[Nm];R:旋转半径[m];N:线圈圈数;L:磁通宽[m]。 直线型或是摆动型,他门基本原理相同。通点的导体穿过磁场的时候,会产生一个垂直于磁场线的力,这个力的大小取决于通过场的导体的长度,磁场及电流的强度。音圈马达产生的推力的大小取决于设计结构以及电流强度:F = B*L*I, 电流与产生的力的关系,在直线型音圈电机中体现为力敏感度Kf,在旋转型音圈马达中体现为扭力敏感度Kt。我們的设计中把Kf的单位定义为N/A,Kt的单位为N·M/A。音圈马达是一个简单的装置,将电流转化为机械力。所以其定位以及力的控制通过位置反馈装置以及控制器达成,其精度由控制器决定,与音圈马达本身毫无关系。 通过改变马达内线圈的直流电流大小,来控制弹簧片的拉伸位置,从而带动上下运动 5、VCM分类: 从结构上大致可分三类: (1)弹片式结构 ;(2)滚珠式结构; (3)摩擦式结构。 从功能上大致分为五类: (1)Open loop开马达; (2)Close loop闭环马达 ;(3)Alternate中置马达 ;(4)OIS光学防抖马达(分平移式、移轴式、记忆金属式等);(5) OIS+Close loop六轴马达 。 6、实现对焦的方法: A:实现光学变焦采用变焦马达(ZOOM) 通过移动镜头内部的镜片来改变焦点的位置,改变镜头焦距的长短,并改变镜头的视角大小,从而实现影响的放大与缩小。 B:实现自动对焦采用对焦马达(AF) 过微距离移动整个镜头(而不是镜头内的镜片)的位置,控制镜头焦距的长短,而实现影像 的清晰.手机中常用的方法。 光学对焦和光学变焦是不同的概念: 光学变焦是通过移动镜头内部镜片的相对位置来改变焦点的位置,改变镜头焦距的长短,并改变镜头的视角大小,从而实现影像的放大与缩小; 光学对焦是实际上是调整整个镜头的位置(而不是镜头内的镜片)的位置,来控制像距,从而使成像最清晰。 五、红外滤光片红外滤光片:在摄像头的成像过程中,光线的颜色是非常重要的因素。为了保证成像的准确性和真实性,摄像头通常需要配备红外滤光片。 红外滤光片是一种特殊的滤光器,它可以过滤掉红外线(IR)波段的光线,只允许可见光(VIS)波段的光线通过。这是因为在拍摄照片或录制视频时,红外光会对图像的真实性和准确性产生影响。 红外滤光片主要由玻璃等材料制成,其特殊的光学性能可以有效地阻挡红外光的穿透,提高了拍摄的清晰度和色彩还原度。在摄像头模组中,红外滤光片通常位于镜头的前面,起到光学保护和滤镜的作用。 六、Sensor1. 感光原理 Camera Sensor是由数百万上千万数量小方块的CCD或CMOS感光元件(简称像素),以平面阵列方式排列组成,其感光原理是于感光元件表层上整合RGB(红、绿、蓝)三原色的滤镜,通过对一个一个的感光点对光进行采样和量化形成图像。Sensor中每一个感光点只对应一个彩色滤光片,因此只能感光RGB中的一种颜色。通常所说的30万像素或130万像素等,指的是有30万或130万个感光点。如果一台拥有一千二百万像素的数码相机,明显地就是最少12,000,000小方块的感光元件了。
Sensor的彩色滤镜阵列元件,基本上是采用了Bayer图样(RGRG/GBGB排列如上图)的排列方式,实现RGB三原色滤镜依序,以Striped Array(条状阵列)形式,红、蓝、绿相互交替,各施其职,分别去 "捕捉" 三原色的光能量。以光学的角度而言,应该说成是光线通过镜头的不同镜片组,投射抵达至整合了Bayer图样的条状阵列RGB滤镜的图像传感器,而图像传感器记录了进光量的电荷,转成数字参数,成为了RAW文件的图像信息即RAW DATA。 绿色滤镜元件,是红、蓝的2倍,只因人类眼睛识别颜色不是线性的,我们的眼睛对于绿色,显然是比较敏感。因此护眼常识都在鼓励人们多看绿色的缘故。理论上RGB的3原色滤镜数量比例是1: 2: 1。 Bayer RGB是属于 RGB RAW data的,但是 RGB RAW data不一定是Bayer pattern。Sensor输出的RAW格式图像大小取决于自身特性与配置,例如某款Sensor配置为10-bit RGB RAW并且图像尺寸为1024*768,那么单帧图像大小为1024*768*10bit=7680kb。 当然也有些Sensor内置格式转换单元,可以直接输出YUV数据或者RGB数据。 2、 Sensor 结构: 光线不是经由镜头,然后直接照射CCD/CMOS 的感光二极管阵列上的。在光线射到感光阵列前,还要经过传感器表层的微透镜和滤光层。在感光二极管之上,有很多微型的透镜。这些透镜按照二极管的阵列排列,也就是每个感光二极管的上面都有附着一个微型透镜,即一个透镜对应一个像素来排列。微透镜是用来聚集光线的凸透镜。在阵列中,感光二极管的感光面有限,对应一格像素内的大部分面积是无效受光区域,所以要把阵列中每格二极管前的光线集中起来,射到二极管的受光面上。滤光层的作用是把色彩滤掉。保证每个二极管感受到的光是单色的。因为感光二极管只能输出不同的电平,也就是只能表示光的强度,没办法表示颜色信息。在二极管阵列前面,加个滤光层,指定这个二极管感受一种颜色的光强,光线中其他的颜色就去掉。这样每个二极管的输出信号就对应为一种颜色的强度了。这种做法的缺点是每个像素点得不到真正的信息,只能通过相邻像素的其他颜色强度,来猜测自己这一格内的其他颜色强度,再把颜色组合起来,算出真正的颜色。这就是所谓的马赛克结构。最常见的马赛克结构就是RGB 三个基色相错排列;适马开发的FOVEON X3 传感器,其实就是每个格子的感光电路,可以感受RGB 三种基色的信息,缺点是在感光阵列上要加三层滤光层,光线强度会有损失。
3、Sensor 的评价指标 可以从光学特性和电学特性两个方面来评价sensor 的性能。大像素和高像素(高像素密度):同样画幅的传感器,像素的面积(即大小),数量(或者说像素密度)以及能够设置到多高ISO 都是衡量数码相机传感器能力的重要指标。以CMOS Sensor 为例,大像素和高像素的优劣在等面积下,像素密度越高,数量越多,因为构成每个像素的CMOS 器件都会有一些面积被放大器和转换电路占据(这是CMOS 与CCD 器件的区别之一),像素越多,电路部分占用的面积就越多。由于只有接收到的信号强度达到某一个阈值时才有可能驱动模数转换电路工作,对每个像素来说,如果接收到的光子数量低于这个阈值值根本就不会产生输出信号,这种情况下,高密度像素传感器有一部分像素相当于没有工作,而大像素sensor 响应的概率会远大于高密度像素sensor,此时应以响应像素密度来评测sensor 质量。ISO :是感光度的意思,它是国际标准化组织(International Standards Organization)的缩写,也正是这个组织对感光度做了量化规定。ISO 感光度是衡量传统相机所使用胶片感光速度标准的国际统一指标,其反映了胶片感光时的速度(其实是银元素与光线的光化学反应速度)。传统相机可以根据拍摄现场的具体情况选择不同ISO 感光度的低速、中速或高速胶片进行拍摄。在传统胶卷相机上ISO 代表感光速度的标准,在数码相机中ISO 定义和胶卷相同,代表着CCD 或者CMOS 感光元件的感光速度,ISO 数值越高就说明该感光材料的感光能力越强。 ISO 速度、曝光指数和感光度 从严格意义上来说,ISO 速度、曝光指数和感光度是三个不同的概念。曝光指数是指具体ISO 速度的值或设置,比如ISO 100。感光度是感光元件(胶片或光电传感器)在对应曝光指数时的感光能力。而ISO 标定就是测定感光元件在不同感光度下所对应的曝光指数。在ISO 标定后,曝光指数即可视为感光度。所以,一般也称数码相机的ISO 速度为感光度。 曝光值和曝光量 曝光值0(EV0)对应于曝光时间为1 秒而光圈为f/1.0 的组合或其等效组合。 七、PCB相机PCB(Printed Circuit Board)指的是相机内部的电路板,用于控制相机的各项功能。相机PCB通常包括主板和子板两种类型。 主板是相机PCB的核心部件,负责控制相机的各个部分,例如图像传感器、光圈、快门、自动对焦、曝光等。主板还可以与相机的显示屏、存储卡、电池等部件进行通讯,以实现相机的各项功能。主板的设计和制造需要考虑到电路的可靠性、稳定性和耐用性等因素。 子板则是相机PCB的辅助部件,用于实现相机的一些特殊功能,例如GPS、WiFi、蓝牙等。子板通常是可拆卸的,这意味着可以根据需要添加或移除一些特殊功能。 相机PCB的设计和制造需要考虑到电路的复杂性和精度,以确保相机的各项功能正常运行。相机PCB的制造通常需要使用高精度的印刷技术和精密的焊接工艺,以确保电路的可靠性和稳定性。 参考文档: Camera 模组之 VCM篇 - 知乎 camera器件(sensor简介)_camera sensor_青春~飞鸟的博客-CSDN博客 |






【本文地址】
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |