| 四轴飞行器基本组成及其飞行原理详解 | 您所在的位置:网站首页 › 无人机机架设计原理图 › 四轴飞行器基本组成及其飞行原理详解 |
四轴飞行器基本组成及其飞行原理详解
|
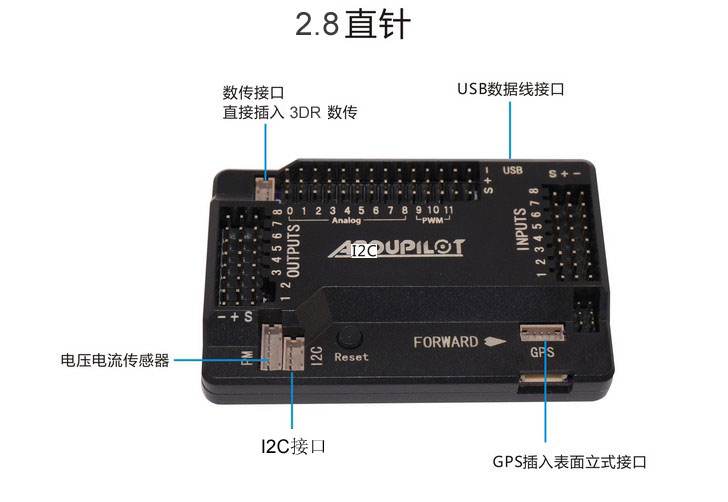
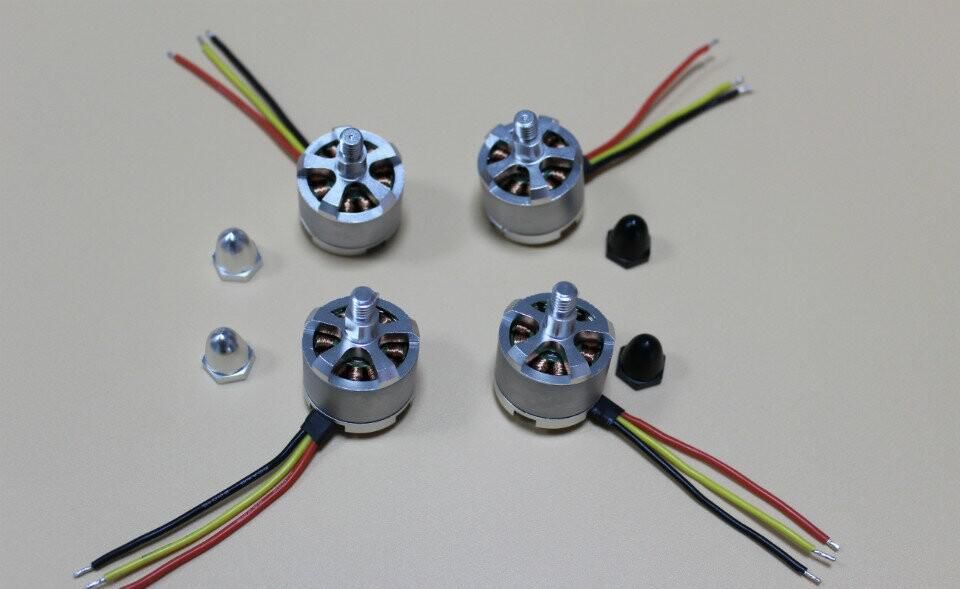
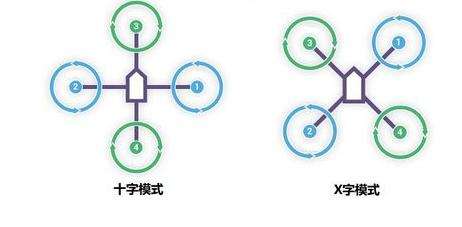
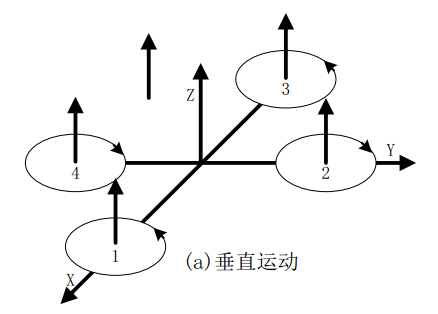
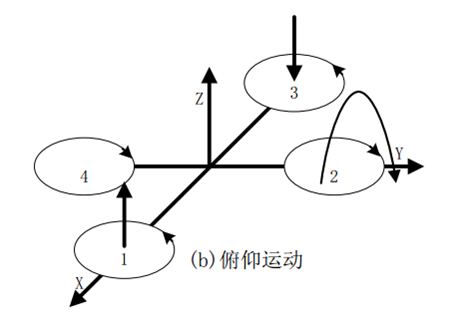
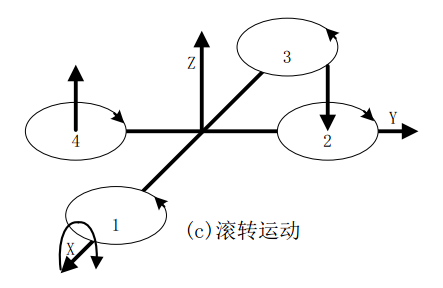
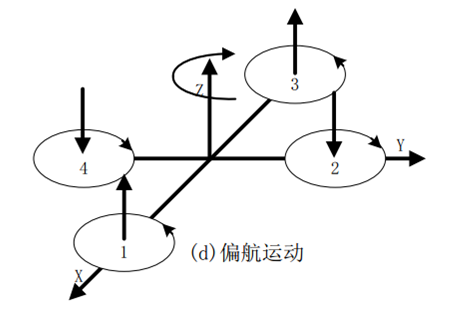
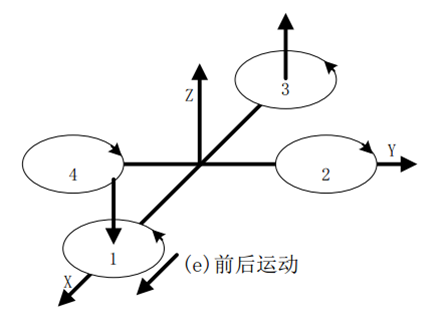
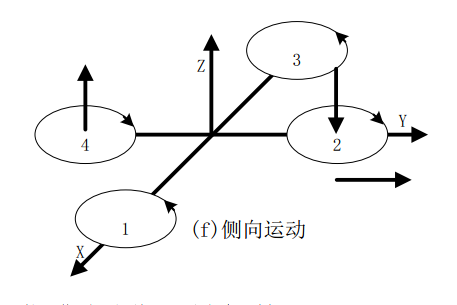
近日,自己组装了一台 四轴飞行器; 组装完后,便想深究其原理;避免只是 知其然,却不知其所以然; 查阅资料后,便在其他文章的基础上,将此文 归纳整理 出来; 文章末尾有参考文章列表,同时感谢原作者的创作; 先上一张自己组装的 四轴飞行器 ( ̄▽ ̄)/: 遥控器:向飞控发出信号;四轴飞行器的遥控器至少需要 4 个通道,分别用于:油门、旋转、前后飞、左右飞; 图为 FS-i6 遥控器: 飞控:是飞行器的大脑,保持自身稳定飞行;接收遥控器信号,并将信号传输给电调告诉它如何飞行; 图为 APM 飞控: 电调:将飞控的控制信号,转变为电流的大小,以控制电机的转速; 图为 好盈电调: 电机:转; 图为 2212无刷电机: 机架:用于承载上述物品; 图为 F450机架: 其实还有其他组件比如:正反桨叶、电池、GPS、夜航灯 和 防撞圈 等其他物品,因为其不是核心物品,所以这里便不再一一细说; 二、四轴飞行器飞行原理事实上,四轴飞行器还分两种布局,一种是 十字形布局,另外一种则是较为常见的 X型布局 ; 以这张图为例: 各个旋翼对机身所施加的反扭矩与旋翼的旋转方向相反,因此当 电机1 和 电机2 逆时针旋转的同时,电机3 和 电机4 顺时针旋转,可以平衡旋翼对机身的反扭矩;四旋翼飞行器在空间共有6个自由度(分别沿3个坐标轴作平移和旋转动作),这6个自由度的控制都可以通过调节不同电机的转速来实现; 其基本运动状态分别为: 垂直运动;俯仰运动;滚转运动;偏航运动;前后运动;侧向运动;那么在控制飞行器飞行时,有如下技术难点: 首先,在飞行过程中它不仅受到各种物理效应的作用,还很容易受到气流等外部环境的干扰,很难获得其准确的性能参数; 其次,微型四轴无人飞行器是一个具有六个自由度,而只有四个控制输入的欠驱动系统;它具有多变量、非线性、强耦合和干扰敏感的特性,使得飞行控制系统的设计变得非常困难; 再次,利用陀螺进行物体姿态检测需要进行累计误差的消除,怎样建立误差模型和通过组合导航修正累积误差是一个工程难题;这三个问题解决成功与否,是实现微型四旋翼无人飞行器自主飞行控制的关键,具有非常重要的研究价值; 下面将逐个说明飞行器的各种飞行姿态: 垂直运动: 在图 a 中,因有两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升; 反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿 z 轴的垂直运动; 当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态; 保证四个旋翼转速同步增加或减小是垂直运动的关键; 俯仰运动: 在图 b 中,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变; 为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力改变,旋翼1 与 旋翼3 转速该变量的大小应相等; 由于 旋翼1 的升力上升,旋翼3 的升力下降,产生的不平衡力矩使机身绕 y 轴旋转(方向如图所示),同理,当 电机1 的转速下降,电机3 的转速上升,机身便绕 y 轴向另一个方向旋转,实现飞行器的俯仰运动; 滚转运动: 与图 b 的原理相同,在图 c 中,改变 电机2 和 电机4 的转速,保持 电机1 和 电机3 的转速不变,则可使机身绕 x 轴旋转(正向和反向),实现飞行器的滚转运动; 偏航运动: 四旋翼飞行器偏航运动可以借助旋翼产生的反扭矩来实现; 旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的来年各个旋翼转动方向相同; 反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动; 当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动; 在图 d 中,当 电机1 和 电机3 的转速上升,电机2 和 电机4 的转速下降时,旋翼1 和 旋翼3 对机身的反扭矩大于 旋翼2 和 旋翼4 对机身的反扭矩,机身便在富余反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与 电机1、电机3 的转向相反; 前后运动: 要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力; 在图 e 中,增加 电机3 转速,使拉力增大,相应减小 电机1 转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡; 按图 b 的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动,向后飞行与向前飞行正好相反; 当然在图 b 图 c 中,飞行器在产生俯仰、翻滚运动的同时也会产生沿 x、y 轴的水平运动; 侧向运动: 在图 f 中,由于结构对称,所以侧向飞行的工作原理与前后运动完全一样; 参考文章列表: 四轴飞行器飞行原理详解 四轴飞行器原理 四轴飞行器-概念扫盲 |




 由于 X型布局 的应用更为广泛,这里我们就重点讲解 X型布局 的飞行原理;
由于 X型布局 的应用更为广泛,这里我们就重点讲解 X型布局 的飞行原理;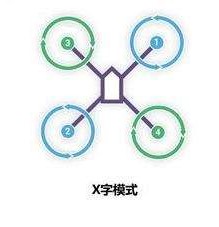 箭头所指为机头时,电机1 和 电机2 逆时针旋转的同时,电机3和 电机4 顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消; 与传统的直升机相比,四轴飞行器有下列优势:
箭头所指为机头时,电机1 和 电机2 逆时针旋转的同时,电机3和 电机4 顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消; 与传统的直升机相比,四轴飞行器有下列优势: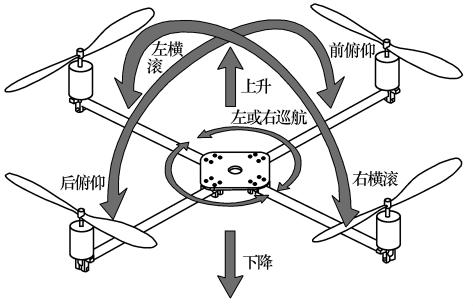
【本文地址】