| 数字PID控制实验 | 您所在的位置:网站首页 › 数字PID控制实验数据 › 数字PID控制实验 |
数字PID控制实验
|
数字PID控制实验
时间:2024.7.8
4.5.1数字PID控制实验
1 标准PID控制算法
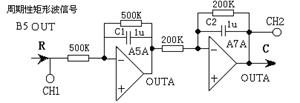
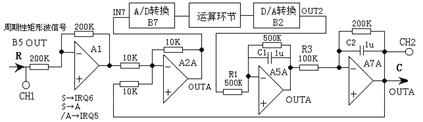
一.实验要求 1. 了解和掌握连续控制系统的PID控制的原理。 2. 了解和掌握被控对象数学模型的建立。 3. 了解和掌握数字PID调节器控制参数的工程整定方法。 4. 观察和分析在标准PID控制系统中,P.I.D参数对系统性能的影响。 二.实验内容及步骤 ⑴确立模型结构 本实验采用二个惯性环节串接组成实验被控对象,T1=0.2S,T2=0.5S Ko=2。 ⑵被控对象参数的确认 被控对象参数的确认构成如图4-5-10所示。本实验将函数发生器(B5)单元作为信号发生器,矩形波输出(OUT)施加于被测系统的输入端R,观察矩形波从0V阶跃到+2.5V时被控对象的响应曲线。
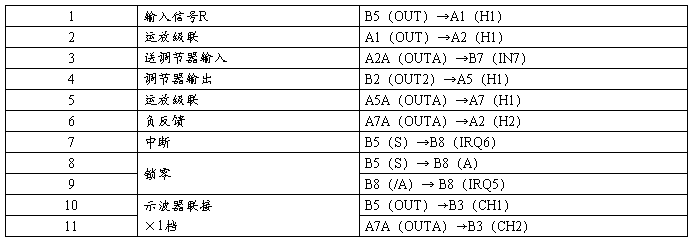
图4-5-10 被控对象参数的确认构成 实验步骤:注:将‘S ST’用‘短路套’短接! ① 在显示与功能选择(D1)单元中,通过波形选择按键选中‘矩形波’(矩形波指示灯亮)。 ② B5的量程选择开关S2置下档,调节“设定电位器1”,使之矩形波宽度>2秒(D1单元左显示)。 ③ 调节B5单元的“矩形波调幅”电位器使矩形波输出电压= 2.5V左右(D1单元右显示)。 ④ 构造模拟电路:按图4-5-10安置短路套及测孔联线,表如下。 (a)安置短路套 (b)测孔联线 

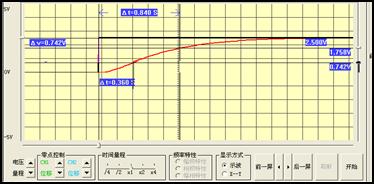
⑤ 运行、观察、记录: A)先运行LABACT程序,选择界面的“工具”菜单选中“双迹示波器”(Alt+W)项,弹出双迹示波器的界面,点击开始,用虚拟示波器观察系统输入信号。
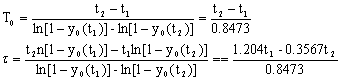
图4-5-11 被控对象响应曲线 B) 在图4-5-112被控对象响应曲线上测得t1和t2。 通常取 通常取 计算
C) 求得数字PID调节器控制参数
据上式计算数字PID调节器控制参数 ⑶数字PID闭环控制系统实验 数字PID闭环控制系统实验构成见图4-5-12,观察和分析在标准PID控制系统中,P.I.D参数对系统性能的影响,分别改变P.I.D参数,观察输出特性,填入实验报告,
图4-5-12 数字PID闭环控制系统实验构成 实验步骤:注:将‘S ST’用‘短路套’短接! ① 在显示与功能选择(D1)单元中,通过波形选择按键选中‘矩形波’(矩形波指示灯亮)。 ② B5的量程选择开关S2置下档,调节“设定电位器1”,使之矩形波宽度≥2秒(D1单元左显示)。 ③ 调节B5单元的“矩形波调幅”电位器使矩形波输出电压= 2.5V(D1单元右显示)。 ④ 构造模拟电路:按图4-5-12安置短路套及测孔联线,表如下。 a)安置短路套 (b)测孔联线 
(3) 运行、观察、记录: ① 运行LABACT程序,选择微机控制菜单下的数字PID控制实验下的标准PID控制选项,会弹出虚拟示波器的界面,设置采样周期T=0.05秒,然后点击开始后将自动加载相应源文件,运行实验程序。 ② 在程序运行中,设置Kp=0.33,Ti=0.36,Td=0.055,然后点击发送。 ③ 点击停止,观察实验结果。 ⑷ 数字PID调节器控制参数的修正 采样周期保持T=0.05秒,为了使系统的响应速度加快,可增大比例调节的增益Kp(设Kp=2);又为了使系统的超调不致于过大,牺牲一点稳态控制精度,增加点积分时间常数Ti=0.6,微分时间常数Td不变,观察实验结果(超调量Mp及上升时间tp)。 三.实验报告要求 ⑴ 用LabACT实验箱获取被控对象参数To和τ。 ⑵ 求取数字PID调节器控制参数Kp、Ti、Td(开环整定法)。 ⑷ 画出数字PID闭环控制系统实验响应曲线 ⑹ 记录数字PID闭环控制系统的超调量Mp及上升时间tp分别填入下表。 ⑺ 比较修正前后数字PID闭环控制系统的超调量Mp及上升时间tp,从定性的角度写出PID调节器控制参数Kp、Ti、Td对系统性能的影响。 4.5.2 积分分离PID控制算法一.实验目的 1.了解和掌握PID控制系统中的积分饱和现象的产生原因及消除的方法。 2.观察和分析采用积分分离PID控制后,控制性能改善的程度及原因。 二、实验内容及步骤 在PID控制算法系统中,引进积分分离法,既保持了积分的作用,又减小了超调量,使得控制性能有了较大的改善。 当偏差值 积分分离阀值Eo,其数值范围为0~4.9V。 积分分离PID控制算法系统构成如图4-5-12所示(与标准PID控制实验构成相同)。 分别观察标准PID控制与积分分离PID控制输出,分析控制性能改善的程度及原因。 实验步骤:同标准PID控制实验,注意,运行LABACT程序时,选择微分控制菜单下的数字PID控制实验下的积分分离PID控制选项。 标准PID控制:设置Kp=1,Ti=0.36,Td=0.055,设置积分分离阀值Eo=5V的。 积分分离PID控制:设置Kp=1,Ti=0.36,Td=0.055,设置积分分离阀值Eo=2V。 三.实验报告要求 1.分别记录标准PID控制和积分分离PID控制的超调量Mp及上升时间tp 2.分别观察标准PID控制与积分分离PID控制输出,分析控制性能改善的程度及原因。 第二篇:实验六 数字PID控制实验六 数字PID控制 一、实验目的 1.了解PID控制器中P、I、D三种基本控制作用对控制系统性能的影响。 2.进行PID控制器参数工程整定技能训练。 二、实验原理 比例-积分-微分(PID)控制器是工业控制中常见的一种控制装置,它广泛用于化工、冶金、机械等工业过程控制系统中。PID有几个重要的功能:提供反馈控制;通过积分作用消除稳态误差;通过微分作用预测将来以减小动态偏差。PID控制器作为最常用的控制器,在控制系统中所处的位置如图6-1所示。 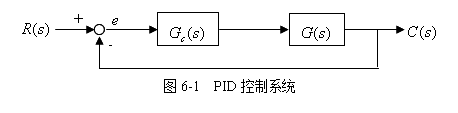
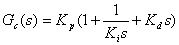
PID控制器的传递函数表达式为: PID控制器的整定就是针对具体的控制对象和控制要求调整控制器参数,求取控制质量最好的控制器参数值。即确定最适合的比例系数 1.PID控制器模型的建立
图6-2中,GAIN模块的增益值对应于 2.PID控制器的参数整定 采用根据经验公式和实践相结合的方法进行PID控制器的参数整定。 (1)衰减曲线经验公式法 在闭环控制系统中,先将控制器变为纯比例作用,并将比例度预置在较大的数值上。在达到稳定后,用改变给定值的方法加入阶跃干扰,观察被控变量曲线的衰减比,然后从大到小改变比例度,直至出现4:1衰减比为止,记下此时的比例度 比例带系数 积分时间 微分时间 (2)实践整定法 先用经验公式法初定PID参数,然后,微调各参数并观察系统响应变化,直至得到较理想的控制性能。 例:已知系统框图如图6-3所示,采用PID控制器,使得控制系统得性能达到最优。 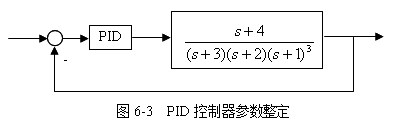
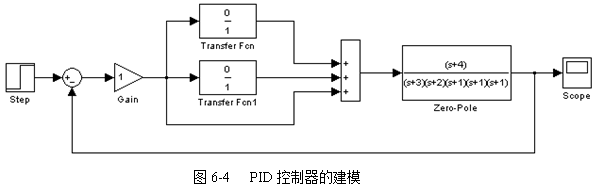
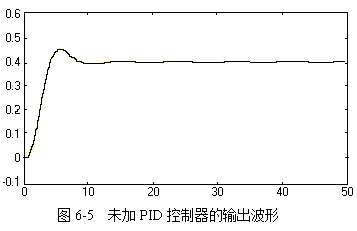
解:(1)建模 首先建立加入PID控制器的系统模型,框图如图6-4所示,图中Transfer Fcn对应积分环节,Transfer Fcn1对应微分环节。在未加PID控制器的情况下,获取输出波形如图6-5所示。图中,系统的稳态误差较大,非理想状态。 (2)整定 根据衰减曲线经验公式法,首先令积分环节和微分环节模块不发生作用,如图6-4
(3)结果分析 最后达到系统的稳态误差为0,超调量为4%左右,接近理想系统的输出状态。 三、实验内容 对如图6-8所示的系统,整定各PID参数,使得控制系统性能达到最优(即系统稳态误差最小、超调量小、调整时间短等)。 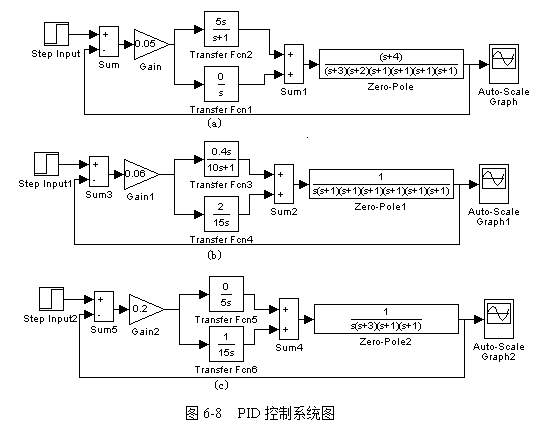
四、实验报告 1.写出控制得到的三组最优 2.指出这三种系统分别为几型系统。 3.分别画出P、I、D三种控制器单独作用下的输出波形图,并分析三种控制器对系统性能的影响。 4.结合实验中遇到的问题谈谈自己的心得和体会。 五、预习要求 1.PD和PI控制器各适用于什么场合?它们各有什么优、缺点? 2.PID控制器的优点?如何实现PID参数整定? 更多相关推荐: 数字调制实验报告武夷学院实验报告课程名称项目名称姓名专业班级学号同组成员1注1实验准备部分包括实验环境准备和实验所需知识点准备2若是单人单组实验同组成员填无2注实验过程记录要包含实验步骤页码不够可自行添加实验报告成绩百分制实验... 2.数字调制 - 通信原理实验报告计算机与信息工程学院验证性实验报告一实验目的1掌握绝对码AK相对码BK的概念以及它们之间的关系2掌握用键控法产生2ASK2FSK2DPSK信号的方法3掌握BK与2PSK信号波形之间的关系AK与2DPSK信号波形... 《通信原理》数字调制实验报告武夷学院实验报告课程名称通信原理项目名称数字调制姓名专业班级学号同组成员为K1注1实验预习部分包括实验环境准备和实验所需知识点准备2若是单人单组实验同组成员填无2注实验过程记录要包含实验目的实验原理实验步骤页码... 实验指导书(实验2-数字调制解调Ⅱ)实验二数字调制解调实验1实验目标本实验的目的是使用USRP来实现发射和接收射频信号并且通过LabVIEW来实现对不同调制信号的同步性能的对比由于你在实验一中已经完成了数字调制的实验所以在做这部分实验时需要用到之... 数字调制技术ASK FSK PSK实验报告MATLAB专用周实践报告数字调制技术ASKFSKPSK专业通信工程班级1020xx2学号06姓名周凯1一二进制数字调制技术原理数字信号的传输方式分为基带传输和带通传输在实际应用中大多数信道具有带通特性而不能直... 通信原理实验报告模板-数字调制和解调华北电力大学实验报告华北电力大学实验报告实验名称课程名称专业班级学生姓名学号成绩指导教师实验日期华北电力大学实验报告华北电力大学实验报告华北电力大学实验报告华北电力大学实验报告 中南大学通信原理实验报告实验二 数字调制中南大学通信原理实验报告学生姓名学生学号学院信息科学与工程学院专业班级完成时间实验二数字调制一实验目的1掌握绝对码相对码概念及它们之间的变换关系2掌握用键控法产生2ASK2FSK2DPSK信号的方法3掌握相对码... FSK调制及解调实验报告实验四FSK调制及解调实验一实验目的1掌握用键控法产生FSK信号的方法2掌握FSK非相干解调的原理二实验器材1主控amp信号源9号模块各一块2双踪示波器一台3连接线若干三实验原理1实验原理框图FSK调制及解调实... FSK调制解调_标准实验报告实验十六FSK调制解调实验实验目的加深理解FSK调制工作原理及电路组成加深理解利用锁相环解调FSK的原理和实现方法实验环境双踪示波器通信原理实验箱实验原理一FSK调制电路工作原理图1FSK调制电原理框图72数字... ASK-FSK-PSK调制与解调实验报告振幅键控移频键控移相键控调制与解调实验专业通信工程姓名李邦海学号CME10019一实验目的1掌握绝对码相对码的概念以及它们之间的变换关系和变换方法2掌握用键控法产生2ASK2FSK2DPSK信号的方法3掌握相对... 相位调制实验报告12设计任务本设计是基于MATLAB的模拟相位PM调制与解调仿真主要设计思想是利用MATLAB这个强大的数学软件工具其中的通信仿真模块通信工具箱以及M檔等方便快捷灵活的功能实现仿真通信的调制解调设计还借助MAT... 通信原理实验报告三主要数字调制系统的抗误码性能的仿真比较实验三主要数字调制系统的抗误码性能的仿真比较一实验目的1熟悉2ASK2FSK2PSK2DPSK等各种调制方式2学会对2ASK2FSK2PSK2DPSK等相应的主要解调方式下分相干与非相干的误码率进行统计3学会分... 数字调制实验报告(30篇) |

 ,要求从图中测得
,要求从图中测得 ;
; ,要求从图中测得
,要求从图中测得 。
。 和
和 :
:
 、
、 、
、 (工程整定法)
(工程整定法)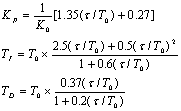
 比较大时,即
比较大时,即 时,PID控制算法系统中,取消积分控制,采用PD控制;当偏差值
时,PID控制算法系统中,取消积分控制,采用PD控制;当偏差值 时,采用PID控制,算法可表示为:
时,采用PID控制,算法可表示为:
 、积分时间
、积分时间 和微分时间
和微分时间 。
。 按图6-2组成PID控制器,其传递函数表达式为
按图6-2组成PID控制器,其传递函数表达式为 。对于实际的微分环节,可将分子、分母同除以
。对于实际的微分环节,可将分子、分母同除以 ,传递函数变为:
,传递函数变为: ,如果要改变PID的参数
,如果要改变PID的参数 ,只要改变模块的分子、分母多项式的系数即可。
,只要改变模块的分子、分母多项式的系数即可。 ,可得微分控制器;在Transfer-Fcn1模块中,令
,可得微分控制器;在Transfer-Fcn1模块中,令 ,可得积分控制器。然后据
,可得积分控制器。然后据 值,对系统进行整定。
值,对系统进行整定。 (称为4:1衰减比例度),从曲线上得到衰减周期
(称为4:1衰减比例度),从曲线上得到衰减周期 。然后根据经验公式,求出控制器的参数整定值。
。然后根据经验公式,求出控制器的参数整定值。


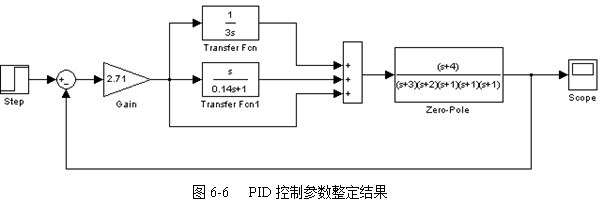
 所示,单独调节比例参数,大约在K=1.6时,出现了4:1的衰减比,此时,根据经验公式换算相关参数,直接设定积分和微分环节的参数,微调,直到达到最佳状态为止。整定好的PID控制系统如图6-6所示,示波器的输出波形如图6-7所示。
所示,单独调节比例参数,大约在K=1.6时,出现了4:1的衰减比,此时,根据经验公式换算相关参数,直接设定积分和微分环节的参数,微调,直到达到最佳状态为止。整定好的PID控制系统如图6-6所示,示波器的输出波形如图6-7所示。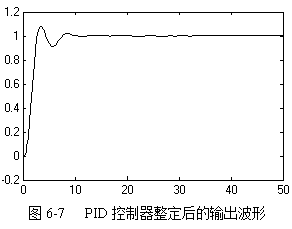
【本文地址】