| 蓝海还是深海?水下机器人研究报告 | 您所在的位置:网站首页 › 我国水下机器人行业发展现状 › 蓝海还是深海?水下机器人研究报告 |
蓝海还是深海?水下机器人研究报告
|
图1:水下机器人发展阶段图 水下机器人起始于军事领域1953年至1974年水下机器人开始被研制和开发。美国的CURV系统在西班牙海成功地回收一枚氢弹,引发了世界各国的关注。伴随着各国军事项目的推进,自1953年第一艘无人遥控水下机器人问世,到1974年的20年里,全世界共研制了20艘无人遥控水下机器人。
图2:CURV系统 早期的水下机器人要应用于海洋石油开采业务1975至1985年,由于海洋油气业的迅速发展,水下机器人飞速发展进入一个全新的发展时期。到1981年,无人遥控水下机器人市场保有量400余艘,其中90%以上用来直接或间接为海洋石油开采业服务。海洋石油和天然气开发的需要,推动了水下机器人理论和应用的研究,水下机器人的数量和种类显著增长。载人水下机器人和无人遥控水下机器人(包括缆遥控水下机器人、水底爬行水下机器人、拖航水下机器人、无缆水下机器人)在海洋调查、海洋石油开发、救捞等方面发挥了较大的作用。
图3: RCV-255 无人无缆水下机器人诞生1988年无人遥控水下机器人市场保有量958艘,比 1981年增加了 110%,这个时期增加的潜水器多数为有缆遥控潜水器。而无人无缆潜水器的发展相对缓慢一些,只研制出26艘,其中8艘应用于工业,其他的均用于军事和科学研究。 1987年,日本海事科学技术中心研究成功深海无人遥控水下机器人“海鲀3K”号,可下潜3300米。1988年,该技术中心为配合“深海6500”号载人水下机器人进行深海调查作业,建造了万米级无人遥控水下机器人。 1988年,美国国防部研究计划局与一家研究机构合作,投资2360万美元研制出两艘无人无缆水下机器人。1990年,无人无缆水下机器人研制成功,定名为“UUV”号。
图4: 海人1号 我国水下机器人起步晚,商业前景尚不明朗1985年,我国开始了对水下机器人的研究和开发,研制出“海人”1号(HR-1)水下机器人,且成功地进行水下实验。2013年随着我国水下机器人技术的突破,我国涌现出一批水下机器人的创业企业,至今仍有上百家企业从事水下机器人行业,头部玩家包括深之蓝、博雅工道、山东未来机器人等。但是我国水下机器人由于起步较晚,商业前景尚不明朗。
图5: 1985年以来部分创立的公司 2. 市场 | 水下机器人的潜在市场规模 目前,水下机器人主要的应用场景在消费、工业及军工方向,以下我们将从这三个领域来梳理整个水下机器人的市场规模。 2.1 消费领域 2016年11月,体育总局出台《水上运动产业发展规划》,对水上运动的运动设施建设、赛事活动供给、培养多元主体、引导水上消费等角度提出了众多发展规划和指导,并提出到2020年,水上运动产业总规模达到3000亿元,水上运动俱乐部达到1000个,全国水上(海上)国民休闲运动中心达到10个等发展目标。除政策推动,民众需求、旅游发展等因素均在推动潜水产业快速发展。据公开数据显示,我国潜水产业近十年的旅客人数参与度维持在30%以上的增速,截至2017年,我国潜水服务市场规模超30亿人民币。
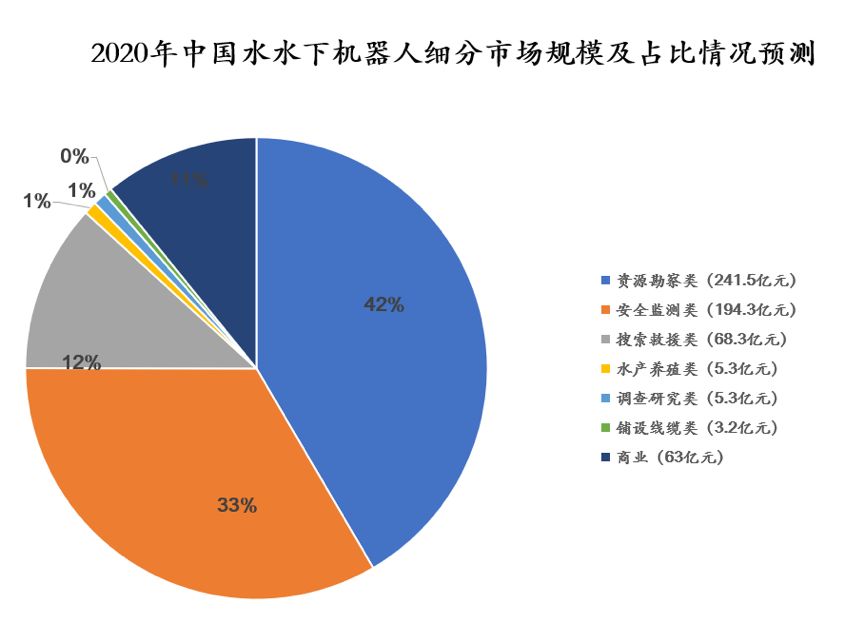
数据来源:网络公开 2.2 工业领域 据公开数据显示,到2020年我国民用水下机器人市场规模将达到580.65亿元,其中资源勘查类水下机器人市场规模为241.5亿元,市场占比为41.59%;安全监测类水下机器人市场规模分为194.3亿元,市场占比为33.45%;搜索救援类机器人市场规模将达到68.3亿元,市场份额为11.75%。
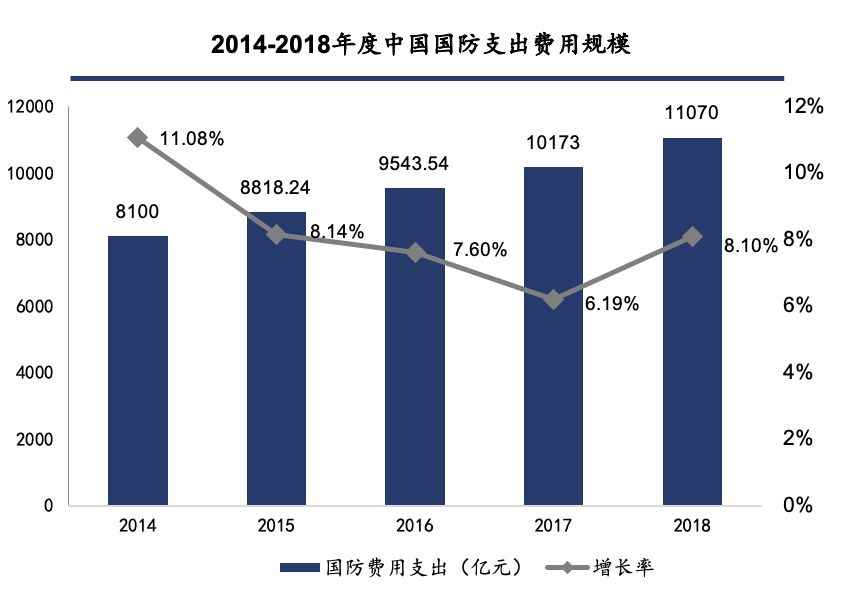
数据来源:中商产业研究院 2.3 军工领域 据财政部公开数据显示,2018年我国国防支出费用达到11070亿人民币,相比2017年的10173亿人民币同比增加8.1%,相比之前有了大幅增长,且未来在科技研发上的投入支出力度将持续加大。
数据来源:网络公开 3. 产品 | 水下机器人的产品体系 根据产品市场定位分类,目前主流水下机器人大制可分为消费级、工业级、军工级三大类。各款主流产品的详细分析见五(市场盘点)。
图6:水下机器人产品分类 消费级水下机器人消费型水下机器人又可分为娱乐与教育两类。娱乐类主要产品形态为水下推进器与水下拍摄机器人。推进器结构较为简单,包括推进器壳体、电池、控制装置、驱动电机、传动装置、螺旋桨及浮力装置7部分。通过手持推进器的方式提控制在水中的活动,调节推进器的转速获得不同程度的助力提高游行速度,推进器不仅可以在水面使用协助游泳初学者学习游泳,而且可以将游泳者带入水下30m深的世界协助潜水爱好者进行观光、探险等活动。
图7:水下推进器 水下拍摄机器人可以理解为无人水下航行,在推进器结构上又配备了高清摄像设备、通信系统、AI系统、照明系统等,这种拍摄类产品可分为有线和无线两种及ROV与AUV,区别在于是否有线体,现阶段大部分娱乐拍照类水下机器人都采用ROV有线模式,这种模式的信息传输能力较强,可以实现直播的功能,并且技术门槛比AUV无线模式低,目前此类产品主要覆盖专业人群。使用者在陆地或船上将机器人放入水中通过操控台进行操控,线缆长度可达100m,无线设备需要配合中继器进行无线信号接收。水下机器人本体靠水下推进器运动拍摄水中的潜水爱好者或海底的风景。部分产品已经可以实现短距离跟拍功能,水下机器人通过水下识别计算,跟随潜水人员自动拍摄。
图8:水下拍摄机器人 教育类水下机器人是机器人教育领域中的一个细分垂直领域,现阶段产品包含编程平台、创客套件。编程平台多为模块化编程,创客套件有类似与乐高样式较为简单适合低龄孩子的形态,也有较为复杂适合高教普教学生教学的平台型套件,可以对套件进行改装实现商品形拍摄机器人的大部分功能。
图9:教育类水下机器人 工业级水下机器人由于各行业的需求不同导致工业级水下机器人产品种类众多,总体上看是在推进系统与拍摄系统的基础之上加装机械臂、声、光、电等各类检测、维修的专业设备,根据行业的不同,设备加装的整合方案都会存在差异,技术实现要求高。现阶段最直观判断性能要求的方式是看本体体积大小,本体越大,说明其性能越高,对技术的要求也会更高。
图10:工业级水下机器人 军工级水下机器人军工级水下机器人因国家战略技术储备需求而发展,与娱乐和工业的显著差别在于成本高、技术难度大、研发周期长等。军工级水下机器人对自身的极限在做出各种挑战与突破,重点对侦察、监听、探测与摧毁水雷、反潜作战等方面进行研究,并且对仿生能力做出要求,我国部分项目已经可以做到雷达无法探索到的能力。
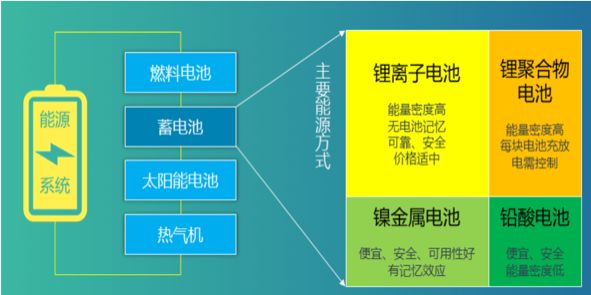
图11:仿生水下机器人 4. 技术 | 水下机器人的技术路径 按控制方式不同,水下机器人可以分为遥控水下机器人(ROV,RemotelyOperated Vehicle, ROV)和智能水下机器人(Autonomous UnderwaterVehicle, AUV)。前者带线缆,由母船上的人工遥控,可以搭载多种传感器和任务载荷;后者无人无缆,可以视作水下版本的“自动驾驶”,能够自主智能航行、自动执行任务,可以多次回收反复使用。目前国内成熟的水下机器人技术应用仍停留在有线遥控阶段,想要实现智能水下机器人仍需要较长的发展历程。 水下机器人的关键技术有7个模块,分别为设计制造技术、能源系统、推进技术、水下通信技术、水下导航定位技术、环境感知技术、自动与智能技术。以下我们将从7个模块分别梳理其核心技术细节。 4.1 设计制造技术 设计制造技术的细分要点包括总体设计技术、航行性能优化技术、载体模块化技术、结构材料应用技术、仿生技术等。设计出密封耐压、水动力性能优良、集成各系统模块的一体化结构是对水下机器人厂商的第一步要求。在此之后,如何从实验室样机制造扩展到实际生产环境下以稳定可靠的制造技术、工艺控制实现大规模量产,是厂商必须面对的巨大挑战。翻过量产的“鸿沟”才算真正迈进水下机器人玩家俱乐部。 目前大多数水下机器人都是载体外形一体化,内部设备进行模块化设计。在载体设计上考虑外形的水动力性能,使用耐压仓结构满足水下密封和承压的要求。一些新兴的仿生机器技术,希望通过模仿水下生物的运动实现高效率、低噪声、高速度、高机动性等优点。 载体外形一体化根据不同任务使命和应用情景的要求,选择不同的尺寸大小,载体外形一体化设计,考虑水动力性能并进行航行性能优化,具体包括阻力性能、推进性能、操纵性能和耐波性能。 内部设备模块化使用耐压仓结构,布置电池、导航和控制设备以及传感器。耐压仓结构多为球壳结构和圆柱壳结构,制造材料多采用铝合金、钛合金、碳纤维,这些材料具有强度高、耐腐蚀、成形性良好等特点。 仿生技术仿生技术是指用人造的处理手段、物质、设备或系统来模仿自然的技术。水下生物的高效率、低噪声、高速度、高机动性等优点,使其成为了新型水下机器人的研究模仿对象。国内水下机器人厂商博雅工道是该领域的领航者,代表产品为BIKI仿生小鱼。 4.2 能源系统 能源系统为水下机器人提供动力源,为电子系统、传感器、任务载荷提供电源。能源系统是水下机器人的作业的主要限制因素之一,限定了水下机器人的续航能力、速度、工作深度、任务载荷种类。基于尺寸、安全、成本的考虑,蓄电池是水下机器人采用的主要能源方式。
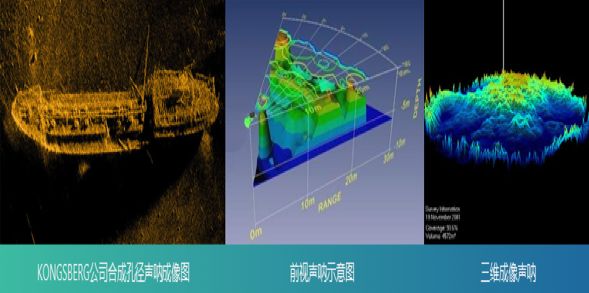
图12:水下机器人能源系统方案 4.3 水下推进技术 推进系统包括推进电机、推进器,其中推进器主要采用低噪声、高效率的螺旋桨,少量系统采用滑翔式或喷水式推进。螺旋桨的类型又细分为固定式、可变倾斜式、对转式等。灵活的操纵是水下机器人优秀产品体验的关键,目前各厂家水下机器人产品都在从3-5个推进器、欠姿态控制,向6个推进、360°全姿态控制演进,具备平移、悬停、环绕、俯仰等全姿态运动能力,以更低的功耗,实现更高自由度的活动。 4.4 水下通信技术 水下通信技术是目前制约智能水下机器人发展的瓶颈之一。水下通信方法包括有线和无线两种。有线通信包括光纤通信、以太网通信等,是最简单、最普遍的办法,但航行范围受到线缆长度限制。水下的无线通信技术包括水声通信、水下光通信、射频通信,以水声通信技术最为成熟、应用最普遍。各项技术的简介与优劣势总结如下表所示。 表1:各项技术简介与优劣势分析 水声通信 水下光通信 射频通信 简介 水声通信利用声波作为传输媒体,是应用最广的水下通信技术 水下光通信技术利用光波传输信息,波长450nm-530nm的蓝绿激光在水下的衰减较其他光波段小得多,可以作为窗口波段应用于水下通信。 电磁波是最常用的信息载体和探知手段,但是在水中电磁波衰减严重,在水中使用电磁波通信非常困难。 优势 ・声波在水中衰减慢,通信距离长达20公里・可用于深水通信 ・超高数据传输速率(高达Gbps)・光速传输,延迟低・收发器的低成本、体积小 ・跨越空气/水边界的相对平滑・更耐水湍流和浊度・宽松的收发天线指向性要求・近距离较高的通信速率(100Mbps)・光速传输,延时低 劣势 ・数据传输速率低(kbps级)・严重的通信延时・收发器的体积大、成本高、耗能大・不能轻易跨越水/空气边界・对海洋生物有害・受到多径效应影响严重 ・不能轻易跨越水/空气边界・水下吸收和散射严重・通信距离中等(几十米) ・射频技术目前只可能应用于浅水近距离收发器的体积大、成本高、耗能大 此外,完整的水下机器人通信系统不仅有水下通信部分,还需要与地面通信相结合。如何以无线通信技术手段实现跨越水-空气界面的通信,一直是悬而未解的难题。水下机器人大都有实时数据传输需求,目前一般采用有线通信方案,实现图像视频等数据的高速率、跨界面传输。通常消费级应用情境下,水下机器人由母船搭载,所连接的通信线缆长度为100-200米,足以满足消费级使用需求。但沉重的线缆的确降低了水下机器人的便携性和应用体验,水声通信或水下光通信方案代替通信线缆,将是未来重要的技术攻关方向。例如,水下机器人与母船通过水下光通信传输数据,再由母船作为中继,实现空中的远程无线传输。 4.5 水下导航定位技术 水下导航定位技术分为基于外部信息的导航(需要与外部的母船/浮标/基站/卫星交互)和基于自身传感器的导航两类,简介如下: 外部信息导航·无线定位:全球卫星导航系统、罗兰C导航系统(需要无线电基站) ·水声定位:根据信号接受器阵列长度,分成长基线系统、短基线系统、超短基线系统,需要在外部的母船/海底/浮标事先布置应答器。 自身传感器导航·惯导系统:以陀螺和加速度计为敏感器件的导航参数解算系统,该系统根据陀螺的输出建立导航坐标系,根据加速度计输出解算出运载体在导航坐标系中的速度和位置。 ·多普勒声呐速度计:发射并接收声波,以多普勒频移原理测量水中航行速度。 ·匹配技术:水下SLAM,水下高精地图匹配等。 单一导航技术的精度、可靠性或多或少存在不足,目前成熟方案采取以惯导为主的组合导航方案。 4.6 环境感知技术 水下环境感知技术主要分为光学目标探测和声呐目标探测两种。 光学技术采用光学/视觉方法对水下环境进行感知。难点在于水下光学环境的不稳定性(光照不均匀、杂质、散射、水流波动),研究方向是通过物理滤镜和图像处理算法进行成像效果的增强。 声呐技术基于声呐原理和声呐系统设备对水中目标进行识别、检测、定位、成像等。按照声呐技术分为合成孔径声呐、前视声呐、三维成像声呐等。
图13:声呐示意图 4.7 自动与智能技术 类比自动驾驶技术,协同进行自主的感知、决策、控制,子功能包括自主避障、路径规划等。稳定环境、短途下的自主航行实现难度相对较低,但复杂环境下的自主感知、避障、路径规划等问题难度大,仍然需要较长发展时间。另外,水下长时间远程航行、恶劣气象环境等情景下设备维护等痛点,并非人工智能所能解决。 5. 分析 | 水下机器人市场盘点 纵览水下机器人公司的发展情况,除外水下机器人仅作为公司部分业务的新三板上市公司臻迪科技,纯粹的水下机器人公司头部玩家为深之蓝、博雅工道,分别于2018年7月和2019年5月完成了B轮融资,其余玩家大多处在Pre-A轮次。相比竞争激烈的航拍无人机市场,消费级水下无人机市场还处于早期阶段。 如前文所述,根据进入市场的策略不同,水下机器人行业玩家可分为三类。第一类以消费级水下娱乐拍摄机器人和水下助推板为切入点,消费级产品体系初步建立后开始向工业级产品发展,逐步扩展应用情景和行业,不断完善产品生态,该类公司典型代表为吉影科技、微孚智能等。第二类玩家深扎垂直行业,锚定某个工业级应用场景,解决痛点问题。该类公司中的三家典型代表分别是大力金刚科技、海之星OStar和山东未来机器人。第三类玩家依托高校和科研院所的深厚技术积淀和成果积累,早期主打军工、大B市场,后期将技术成果民用化,进入消费级市场,典型代表为国内水下机器人行业两个巨头——深之蓝、博雅工道。 以下我们精选了水下机器人市场中有代表性的玩家,对各家公司发展概况和产品体系进行简述。 5.1 消费级市场切入玩家 吉影科技|Geneinno公司简介 吉影科技成立于2013年4月,15年正式进军水下机器人领域,获得发明专利十余项,被评为“国家高新企业”“双软企业”,产品曾荣获2018德国红点产品设计大奖、2019 IF设计奖。创始团队华为出身。 产品体系 推出助推器、消费级水下机器人、专业级/轻工业水下机器人,分别为Trident(泰鼎)水中飞行器、Poseidon(波赛冬)水下无人机、Titian(泰坦)水下无人机。 Trident(泰鼎)助推器,采用双马达设计,重量为3.5kg,轻巧便携;最大工作深度为50m;速度2档可调,最快为1.8m/s;续航时间最长60分钟;总推力12kg,具有正浮力;兼容GoPro。 第二代专业级/轻工业级Titian(泰坦)水下无人机在上一代消费级Poseidon(波赛冬)水下无人机产品基础上进行了升级。最大速度2m/s,最长续航时间为4小时,下潜深度增加到150m(下潜最深的水下机器人),推进控制系统升级为6推进器的全姿态控制,支持定点悬停;支持4K超高清拍摄,配备3000流明照明灯,摄像头广角增加到160°,采用图像处理技术进行浑水成像增强;配备扩展外接接口支持轻工业应用,例如可搭载小型机械手臂进行水下采样。
图14:Trident(泰鼎)水中飞行器、Poseidon(波赛冬)水下无人机、Titian(泰坦)水下无人机 应用情景 水产养殖、水下拍摄、潜水运动、潜艇娱乐等领域 融资情况 2018年1月吉影科技披露已获1500 万人民币pre-A 轮融资,由华睿信领投,乾元中鼎跟投。本轮投资方与天使轮相同,投后估值 1 亿元人民币。 微孚智能|Vxfly公司简介 深圳微孚智能信息科技有限公司,成立于2015年2月,团队来源于西北工业大学,微孚智能的主要产品前期产品为消费级无人机高清数字图像传输系统、无人机相机,目前产品为应用于消费、STEAM教育和水下机器人。 产品体系 上述三个领域对应的产品分别为LeSwim助推器、可编程教育机器人LeBot、专业级水下机器人平台CCROV。 LeSwim推进器尺寸为46cm*37cm*16cm,重量约2.5Kg,可提供4Kg推力和3Kg浮力,最大下潜深度3m,最高速度1m/s,续航时间为30分钟,可兼容安装GoPro。 LeBot可编程教育机器人作为STEAM教育平台,可模块化、积木连接,进行图形化化编程、控制程序设计,配套教程和学习资料,提供多种可扩展套件。 CCROV专业级水下机器人,首发于2016年8月,尺寸为20cm*20cm*13cm,提供工业级扩展配件(AI图像增强,高亮工业平板,工业电源),采用6推进器实现精准控制,实现上下、左右、前后以及环绕5个自由度运动;采用一体式智能集线器(TDS),支持4K高清拍照和720P实时视频传输;同时支持交流与直流的供电系统。
图15:助推器LeSwim、可编程教育机器人LeBot、水下机器人平台CCROV 应用情景 水产养殖、工程、检查、搜索和救援、游艇和帆船、检查、水下、摄影、潜水、钓鱼、旅游、教育、航行。 融资进度 2017年9月Pre-A轮,投资方为新恒利达资本。2015年9月天使轮,融资500万人民币,由国成投资领投,英诺天使基金跟投,估值5000万人民币。 臻迪科技|PowerVision公司简介 臻迪科技成立于2012年10月,凭借着自主研发的小型旋翼、固定翼和高海拔无人直升机等产品,已经在工业级无人机领域占据了一席之地,并于2016年推出了PowerEgg小巨蛋消费级无人机。从2017年开始,臻迪将目光投向了“水下”,先后发布了PowerRay小海鳐、PowerDolphin小海豚和PowerSeeker寻鱼器等水下机器人产品,选择鱼、水上运动作为当前主要应用场景切入。系列水下机器人产品获得2019 IF奖、2018IDEA奖、2018红点奖、2018 CES创新奖、2019 爱迪生发明金奖等。目前臻迪科技形成了包括无人系统(水下无人机、飞行无人机、陆地平台机器人)、大数据、虚拟仿真的产品体系。 产品体系 PowerRay小海鳐采用仿生设计,尺寸465*270*126mm,重量约3.8kg,搭载了2台水平推进器和1台垂直推进器,可以让PowerRay小海鳐以1.5米/秒的速度在静水中自由游弋,最长续航时间4小时;内置4K高清摄像功能,FOV95°;下潜深度30米,通讯电缆长度50m/70m;定深悬停精度达到±10cm。 PowerDolphin小海豚不同于一般的水下机器人,在水面上航行,搭载了一枚独特的双关节旋转相机,镜头拍摄广角达到132°,更可以通过旋转, 提供水上、水下不同视角的拍摄需求,视场角可旋转范围达到-150°至+70°(定义水平位置为0°,朝水下方向 转动为负)。当PowerDolphin小海豚使用向上视角时,可以拍摄水上运动和FPV竞速,使用向下视角可以拍摄钓鱼咬饵过程和水下风光。此外,PowerDolphin小海豚搭载PowerSeeker智能寻鱼器使用,可通过声呐技术快速反馈水下地形及鱼情等信息,智能移动寻鱼并智能推荐钓点。根据水域需求,还可直接拖挂鱼钩和鱼饵,并且无线操控抵达指定位置,极大程度的延展了鱼竿的长度。PowerDolphin小海豚尺寸为534*230*125mm,重量约2.3kg;具备800米无线图传和路径导航与自动返航功能,最高速度为4.5m/s,支持30fps 4K高清拍摄,静水中U档续航2.5小时,最高速度续航20分钟。
图16:PowerRay小海鳐、PowerDolphin小海豚和PowerSeeker寻鱼器 应用情景 水下拍摄、水上运动、钓鱼 融资情况 2016年5月臻迪科技正式挂牌新三板,2018年臻迪的整体估值已经超过了10亿美元晋身独角兽,2018年12月6日在新三板摘牌。 鳍源科技|QYSEA公司简介 鳍源科技成立于2016年7月,是一家集水下机器人研发和产品销售为一体的全球性高科技企业,公司以水下机器人系统及水下大数据为核心,拥有100多项全球专利,不断开拓各类应用场景的深度合作,并且两度蝉联美国CES创新科技大奖。目前产品覆盖了消费及轻工业应用两个方面。创始团队来源于富士康、微软、大疆、中船重工等知名企业。 产品体系 旗下消费级产品FIFISHP3和FIFISH V6,以及轻工业级产品FIFISH P6。 新一代专业级水下拍摄机器人产品FIFISH V6尺寸为383 mm*331 mm*143 mm,重量为3.9 kg,小型便携;采用6推进器设计(4个矢量推进和2个水平推进),实现左右、上下、前后、俯仰、环绕的360°全姿态运动,悬停精度为1cm,姿态控制角度精度为0.1度;最大下潜深度100米,续航时间4小时;采用1/2.3” SONY CMOS传感器,支持4K超高清视频和4000流明补光灯。
图17:FIFISH V6和FIFISH P3 FIFISH P6作为一款面向企业应用的轻工业级水下ROV,可以按照各类需求平台化配置,根据客户预算和使用场景定制开发动力系统、影像系统、照明系统、机械作业系统及声呐等定位系统,扩展周边设备。FIFISH P6的产品尺寸为540毫米x390毫米x340毫米,产品重量为14千克,可下潜最大深度100米,静水状态最高速度为3节(1.5米/秒),云台可俯仰150度(可向上向下各75度)调节,实现水下视角覆盖超过180度。正常持续使用2小时(使用松下18650锂电池电芯),用户可另外购买备用电池组,快速自行更换,延长续航时间。
图18:FIFISH P6 应用情景摄影和制片、水产养殖、科考、水利水电、船坞、搜索救援、教育。 融资情况 2017年7月,鳍源科技完成完成1200万元Pre-A轮融资,投资方为天奇创投。 潜行科技|Chasing公司简介 潜行创新(深圳)科技有限公司成立于2016年4月,是集研发、生产及销售为一体的水下机器人领导企业,产品销往全球四十多个国家和地区。公司总部位于深圳,国内在北京、成都、昆明、青岛设有办公室或子公司,海外在美国建立了全资子公司。公司员工百余人,核心团队来自华为、中船重工、LG、富士康、美国微软、博世等国际一流企业。成立至今已获得“国家级高新技术企业”认证资质,产品鲛GLADIUS MINI斩获德国红点大奖。 产品体系 鲛GLADIUS MINI定位小巧便携的迷你水下机器人,尺寸为385 x 226 x 138 mm,重量轻 ( |















【本文地址】