| ubuntu 18.04 ROS melodic 版本安装配置记录 | 您所在的位置:网站首页 › 如何查看卸载软件的记录内容 › ubuntu 18.04 ROS melodic 版本安装配置记录 |
ubuntu 18.04 ROS melodic 版本安装配置记录
|
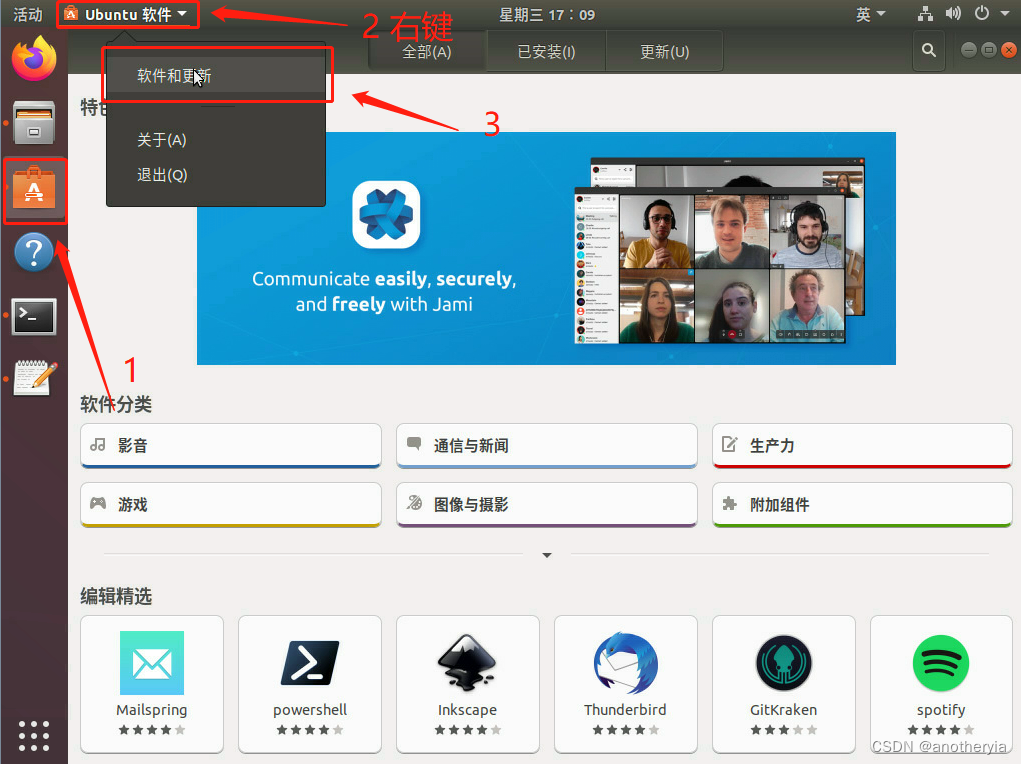
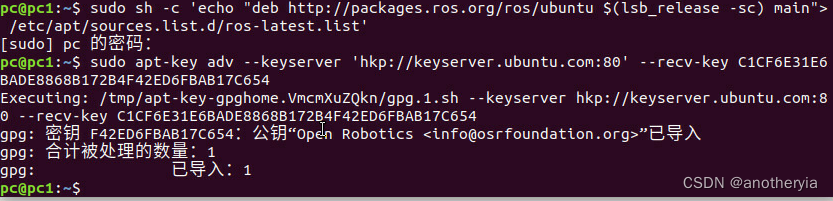
跟着古月·ROS入门21讲 | 一学就会的ROS机器人入门教程(www.bilibili.com/video/BV1zt411G7Vn)安装了ROS,记录一下过程,不然重装又得坑自己一遍。 我是新装的系统(不是新装的试过装melodic包时提示依赖包装不了),先改软件源,软件->右键标签->软件和更新, 添加ros软件源: sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main"> /etc/apt/sources.list.d/ros-latest.list’ 添加秘钥: sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
安装ros完成后,初始化rosdep: sudo rosdep init 我安装的时候提示command not found/找不到命令 如果前面没办法成功下载到文件(毕竟有些学校连GitHub都给屏蔽了呢),rosdep init 也应该是没办法成功的。只能到 /etc/ros/rosdep/sources.list.d/ 目录下新建一个文件20-default.list,将下面的内容复制进去(230621rosdep命令下载的20-default.list)。 # os-specific listings first yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx # generic yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte # newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead继续执行: rosdep update 这个命令也是要尝试多次才能成功,我试到最后是能成功的,但init那个命令是真的试了好久都没成功,最后是网上找的内容直接写的文件。 成功状态如下图:
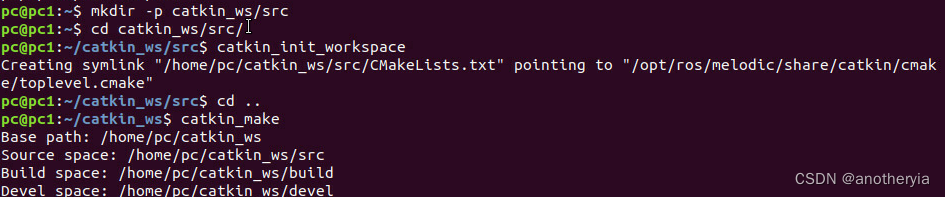
设置环境变量(如果ros的命令和包没办法自动补全就是这里没有设置好): echo "source /opt/ros/melodic/setup.bash">>~/.bashrc source ~/.bashrc 这里设置完成应该就能测试小海龟了。 安装rosinstall: sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential 创建工作空间: mkdir -p ~/catkin_ws/src cd ~/catin_ws/src catkin_init_workspace 编译工作空间:(个人认为这里编译不出错的话自己写的c++文件应该就不会在编译环境上面出问题) cd ~/catkin_ws/ catkin_make
设置环境变量(可以像上面一样直接写到.bashrc 中,这样登录时就能自动添加) source devel/setup.bash
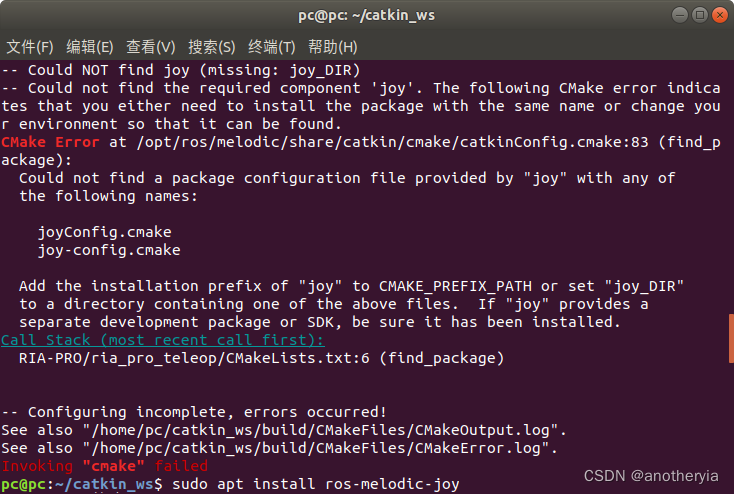
剩下就是建包写代码了。 最后还有一个问题就是编译有时候会出现缺少某个ros包的情况,安装相应包需要在包名前面加‘ros-melodic-’(ros+版本号)。
|
 这4个没勾上的勾上,改一下软件源,可以测试选取最快的(但有可能会需要用到特定的源:关于ROS安装及ROS定位不到软件包的问题解决(blog.csdn.net/YMMMAR/article/details/122142925)),后面安装要下载500多M,一千多个包(虽然很多包还是要从ros官网下)。
这4个没勾上的勾上,改一下软件源,可以测试选取最快的(但有可能会需要用到特定的源:关于ROS安装及ROS定位不到软件包的问题解决(blog.csdn.net/YMMMAR/article/details/122142925)),后面安装要下载500多M,一千多个包(虽然很多包还是要从ros官网下)。 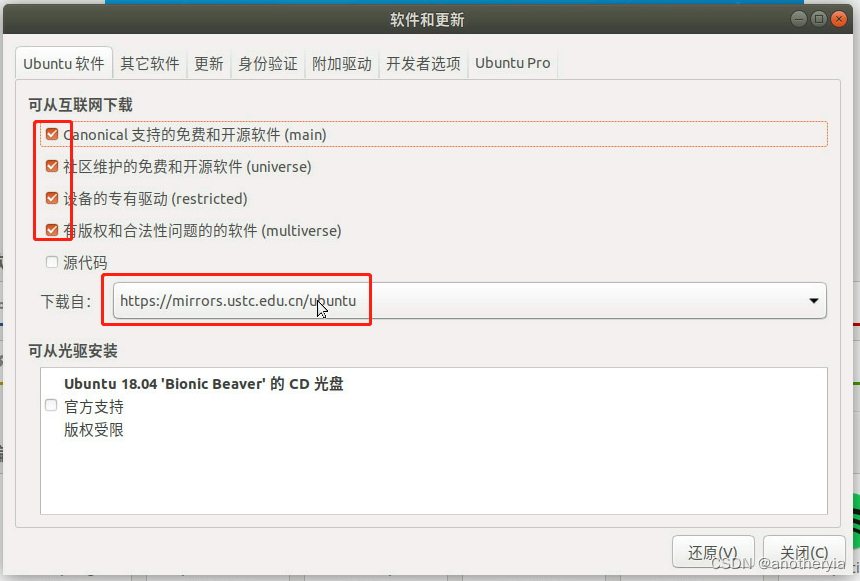
 安装melodic版本ros包: sudo apt update sudo apt install ros-melodic-desktop-full
安装melodic版本ros包: sudo apt update sudo apt install ros-melodic-desktop-full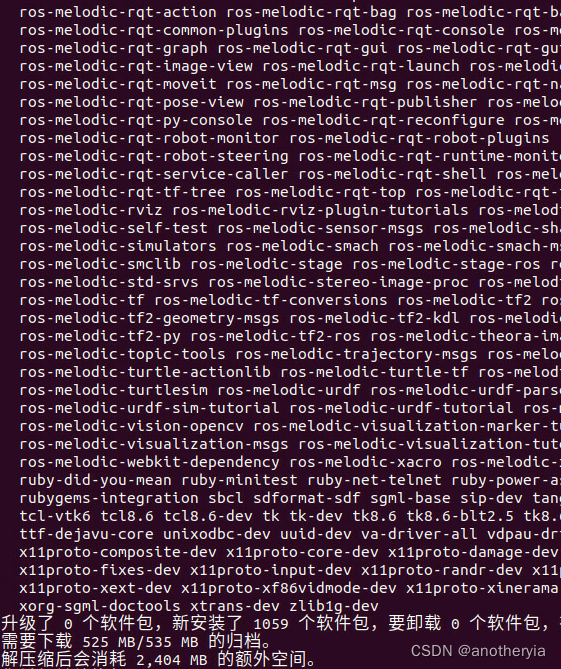 漫长的等待。。。。。。 当然可以先测试一下网络: wget https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list 如果能够成功执行,那接下来的rosdep的步骤应该就能正常执行。 不然趁着安装按照ros安装——sudo rosdep init失败最有效解决办法(blog.csdn.net/qq_41484927/article/details/107494715)尝试去设置。(用上面wget的命令进行测试,因为rosdep还没有安装,rosdep init命令其实就是到上面的网址去下载文件)
漫长的等待。。。。。。 当然可以先测试一下网络: wget https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list 如果能够成功执行,那接下来的rosdep的步骤应该就能正常执行。 不然趁着安装按照ros安装——sudo rosdep init失败最有效解决办法(blog.csdn.net/qq_41484927/article/details/107494715)尝试去设置。(用上面wget的命令进行测试,因为rosdep还没有安装,rosdep init命令其实就是到上面的网址去下载文件) 就安装python-rosdep,melodic版本的应该是python2的;网上有说安装python3-rosdep的,我试了结果会卸载之前安装的一些包,安装python-rosdep就不会;所以我觉得装一个不会卸载之前安装软件的版本应该就不会有问题。
就安装python-rosdep,melodic版本的应该是python2的;网上有说安装python3-rosdep的,我试了结果会卸载之前安装的一些包,安装python-rosdep就不会;所以我觉得装一个不会卸载之前安装软件的版本应该就不会有问题。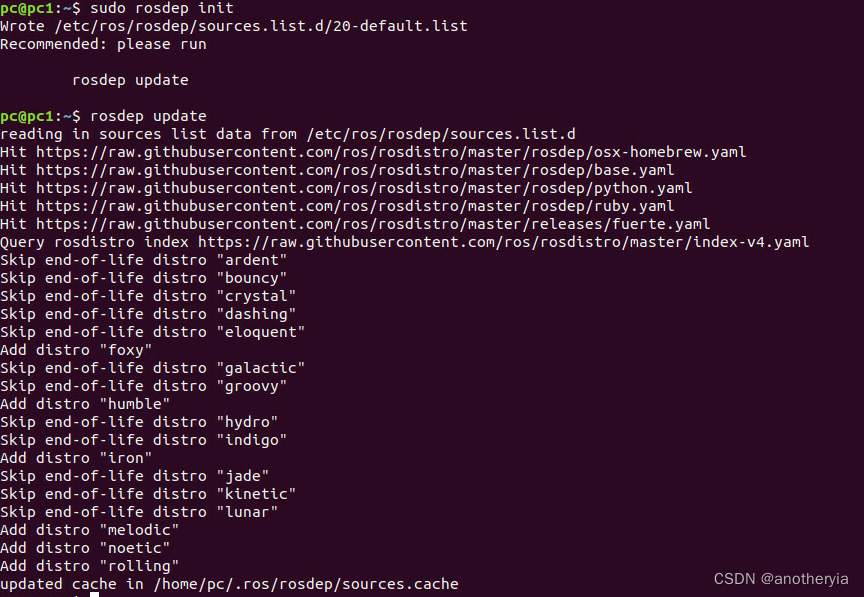

【本文地址】