| Ubuntu 20.04使用Livox mid 360 测试 FAST | 您所在的位置:网站首页 › 大疆激光雷达mid360 › Ubuntu 20.04使用Livox mid 360 测试 FAST |
Ubuntu 20.04使用Livox mid 360 测试 FAST
|
前言
Livox mid360需要使用Livox-SDK2,而非Livox-SDK,以及对应的livox_ros_driver2 。并需要修改FAST_LIO中部分代码。 1. 安装Livox-SDK2参考官方教程。 1.1. 安装CMake sudo apt install cmake1.2. 安装编译Livox-SDK2 git clone https://github.com/Livox-SDK/Livox-SDK2.git cd ./Livox-SDK2/ mkdir build && cd build cmake .. && make -j sudo make install注: Livox-SDK2可以下载在任何位置并编译安装。 2. 编译FAST_LIO工程2.1. 创建ROS1工程 mkdir fast_lio && cd fast_lio mkdir src && cd src2.2. 在src文件夹中下载livox_ros_driver2源码 git clone https://github.com/Livox-SDK/livox_ros_driver2.git cd livox_ros_driver2 ./build ROS12.3. 在src文件夹中下载FAST_LIO源码 git clone https://github.com/hku-mars/FAST_LIO.git cd FAST_LIO git submodule update --init cd ../.. 3. 修改FAST_LIO代码3.1. 修改FAST_LIO的CMakelists.txt 修改前: find_package(catkin REQUIRED COMPONENTS geometry_msgs nav_msgs sensor_msgs roscpp rospy std_msgs pcl_ros tf livox_ros_driver # "lidar_type": 8 }, "MID360": { "lidar_net_info" : { "cmd_data_port": 56100, "push_msg_port": 56200, "point_data_port": 56300, "imu_data_port": 56400, "log_data_port": 56500 }, "host_net_info" : { "cmd_data_ip" : "192.168.1.5", # "roll": 0.0, "pitch": 0.0, "yaw": 0.0, "x": 0, "y": 0, "z": 0 } } ] } 6. 运行测试打开两个终端,分别运行 source devel/setup.bash roslaunch livox_ros_driver2 msg_MID360.launch
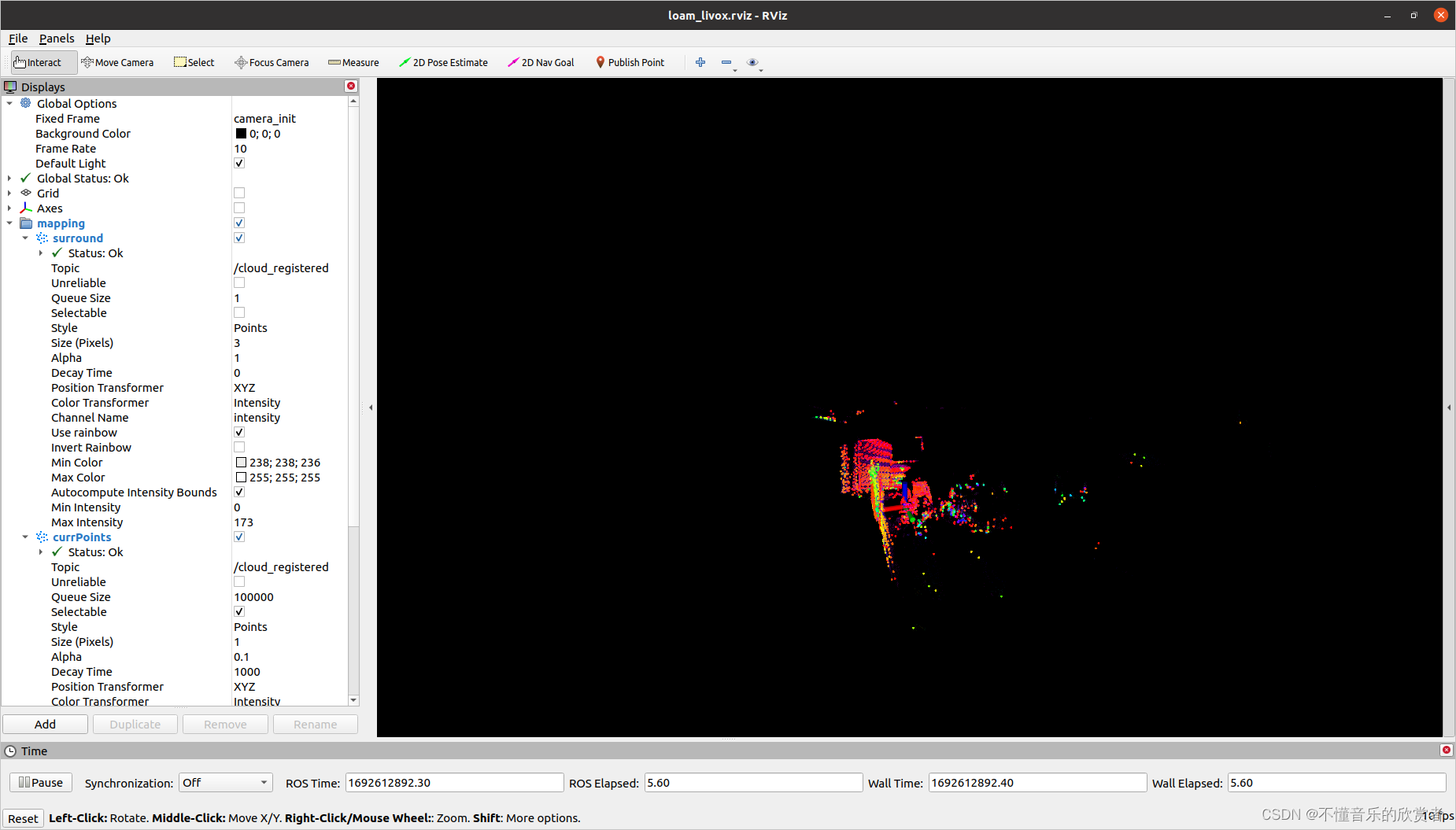
另外一个终端运行 source devel/setup.bash roslaunch fast_lio mapping_mid360.launch 运行成功截图如下 |
【本文地址】
公司简介
联系我们