| 大学物理(上)知识点总结 | 您所在的位置:网站首页 › 大学物理实验基本知识点归纳 › 大学物理(上)知识点总结 |
大学物理(上)知识点总结
|
大学物理(上)知识点总结
期末,总结一下大学物理知识点
对于大学物理(以下简称大物)的知识点总结,采取以公式为主线的方式进行
文章目录
大学物理(上)知识点总结
一、质点动力学
二、刚体的定轴转动
三、机械振动基础
四、机械波
五、波动光学
六、热力学
七、气体动理论
参考资料
一、质点动力学
速度: v ⃗ = d r ⃗ d t \vec v = \frac{d\vec r}{dt} v =dtdr 加速度: a ⃗ = d 2 r ⃗ d t 2 = d v ⃗ d t \vec a = \frac{d^2\vec r}{dt^2} = \frac{d\vec v}{dt} a =dt2d2r =dtdv 圆周运动: a ⃗ = a ⃗ n + a ⃗ τ = v ⃗ 2 R ⋅ n ⃗ + d v ⃗ d t \vec a = \vec a_n + \vec a_\tau = \frac{\vec v^2}{R} \cdot \vec n + \frac{d\vec v}{dt} a =a n+a τ=Rv 2⋅n +dtdv β = d ω ⃗ d t = d 2 θ d t 2 \beta = \frac{d\vec\omega}{dt} = \frac{d^2\theta}{dt^2} β=dtdω =dt2d2θ a ⃗ = a ⃗ n + a ⃗ τ = r ⋅ β ⃗ + r ⋅ w ⃗ 2 \vec a = \vec a_n + \vec a_\tau = r \cdot \vec \beta + r \cdot \vec w^2 a =a n+a τ=r⋅β +r⋅w 2 功: 保守力做功仅与相对位置有关,存在保守立场,蕴含的能量称为势能,即保守力做功 = 势能的增量的负值,而势能只存在相对意义,即必须选取零势能面(点) 非保守力做功与相对移动有关 A = ∫ a b F ⃗ d r ⃗ A = \int_a^b\vec Fd\vec r A=∫abF dr 势能: E p = ∫ M 参 F ⃗ d r E_p = \int_M^参 \vec F dr Ep=∫M参F dr 引力势能为 ∫ r ∞ − G m M r 2 d r = − G M m r \int_r^\infty -G\frac{mM}{r^2}dr = -G\frac{Mm}{r} ∫r∞−Gr2mMdr=−GrMm 功率: P ‾ = Δ A Δ t \overline P = \frac{\Delta A }{\Delta t} P=ΔtΔA P = d A d t = F ⃗ r ⃗ d t = F ⃗ ⋅ v = F ⃗ v c o s θ P = \frac{dA}{dt} = \frac{\vec F \vec r}{dt} = \vec F \cdot v = \vec F v cos\theta P=dtdA=dtF r =F ⋅v=F vcosθ 动能定理:(空间积累) 合外力做功 = 物体始末的动能变化量 A = 1 2 m v 2 2 − 1 2 m v 1 2 A = \frac{1}{2}mv_2^2 - \frac{1}{2}mv_1^2 A=21mv22−21mv12 功能原理: A 外 A_外 A外 A 内 = A 非 + A 保 A_内 = A_非 + A_保 A内=A非+A保 机械能守恒为 ∑ A 外 + A 非 = 0 \sum_{A_外} + A_非 = 0 ∑A外+A非=0时刻满足 动量定理:(时间积累) 条件: ∑ F ⃗ 外 = 0 \sum{\vec F_外} = 0 ∑F 外=0 or 内力>>外力 I ⃗ = ∫ t 1 t 2 F ⃗ d t = ∫ t 1 t 2 d m v ⃗ = m v 1 − m v 2 \vec I = \int_{t1}^{t2}\vec F dt = \int_{t1}^{t2}dm\vec v = mv_1 - mv_2 I =∫t1t2F dt=∫t1t2dmv =mv1−mv2 碰撞(对心): 完全非弹性碰撞:机械能损失最大 弹性碰撞:动能增量为零 非弹性碰撞:动能增量不为零(一般不讨论) 质心:意会 二、刚体的定轴转动力矩: M ⃗ 0 = r ⃗ × F ⃗ \vec M_0 = \vec r \times \vec F M
0=r
×F
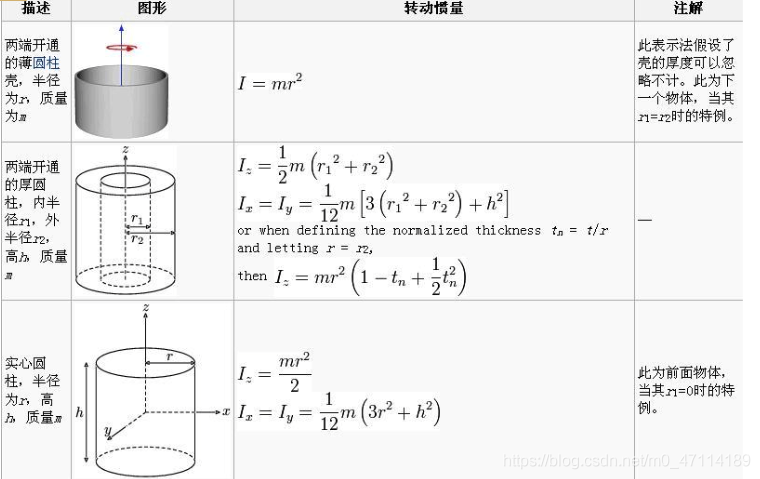
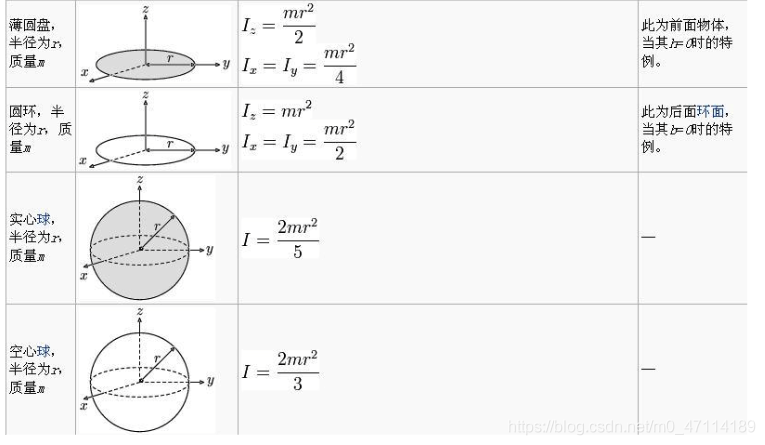
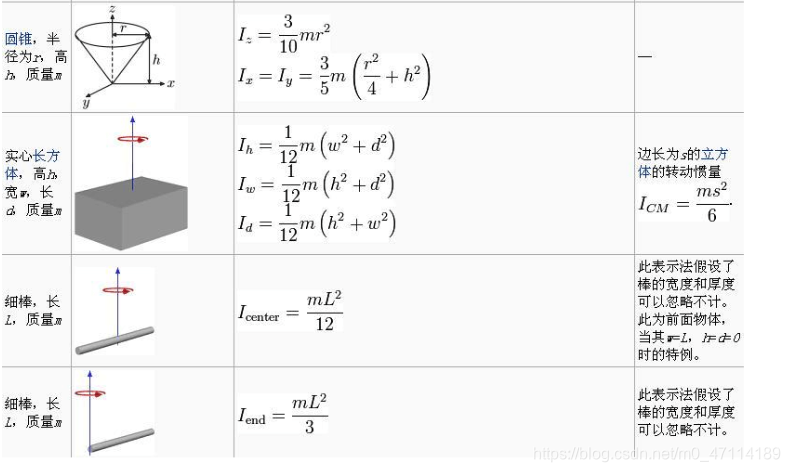
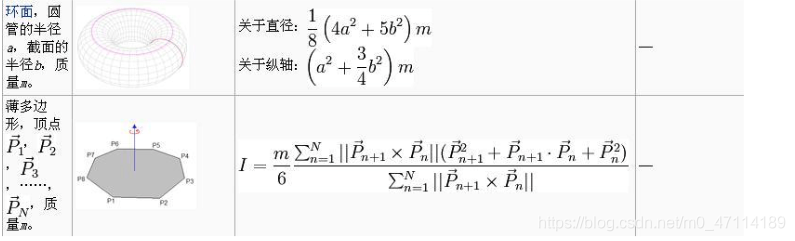
定轴转动定理: M = J β M = J\beta M=Jβ 转动惯量: J = ∑ Δ m i r i 2 J = \sum \Delta m_i r_i^2 J=∑Δmiri2 |
 平行轴定理: J z = J c + m d 2 J_z = J_c + md^2 Jz=Jc+md2 定轴转动刚体动能: E k = 1 2 J ω 2 E_k = \frac{1}{2}J\omega^2 Ek=21Jω2 注:平动动能依然为: E k = 1 2 m v 2 E_k = \frac{1}{2}mv^2 Ek=21mv2 力矩的功: A = ∫ θ 1 θ 2 M d θ A = \int_{\theta_1}^{\theta_2}Md\theta A=∫θ1θ2Mdθ 定轴转动的动能定理: A = ∫ ω 1 ω 2 d ( 1 2 J ω 2 ) = 1 2 J ω 2 2 − 1 2 J ω 1 2 A = \int_{\omega_1}^{\omega_2}d(\frac{1}{2}J\omega^2) = \frac{1}{2}J\omega_2^2 - \frac{1}{2}J\omega_1^2 A=∫ω1ω2d(21Jω2)=21Jω22−21Jω12 角动量: L ⃗ 0 = r ⃗ × m v ⃗ \vec L_0 = \vec r \times m\vec v L
0=r
×mv
角动量定理: M ⃗ 0 = d L ⃗ 0 d t \vec M_0 = \frac{d\vec L_0}{dt} M
0=dtdL
0 角动量守恒定理:(有心力) 若 M 0 = 0 M_0 = 0 M0=0则 L ⃗ = 常 矢 量 \vec L = 常矢量 L
=常矢量 定轴转动的角动量: L ⃗ z = J z ω \vec L_z = J_z \omega L
z=Jzω 定轴转动的角动量定理: 若J为恒量 M ⃗ z = J z d w d t = J z β \vec M_z = J_z\frac{dw}{dt} = J_z \beta M
z=Jzdtdw=Jzβ 定轴转动的角动量守恒定理:(有心力) 若 M z = 0 M_z = 0 Mz=0则 L ⃗ z = J z ω = 常 矢 量 \vec L_z = J_z\omega = 常矢量 L
z
平行轴定理: J z = J c + m d 2 J_z = J_c + md^2 Jz=Jc+md2 定轴转动刚体动能: E k = 1 2 J ω 2 E_k = \frac{1}{2}J\omega^2 Ek=21Jω2 注:平动动能依然为: E k = 1 2 m v 2 E_k = \frac{1}{2}mv^2 Ek=21mv2 力矩的功: A = ∫ θ 1 θ 2 M d θ A = \int_{\theta_1}^{\theta_2}Md\theta A=∫θ1θ2Mdθ 定轴转动的动能定理: A = ∫ ω 1 ω 2 d ( 1 2 J ω 2 ) = 1 2 J ω 2 2 − 1 2 J ω 1 2 A = \int_{\omega_1}^{\omega_2}d(\frac{1}{2}J\omega^2) = \frac{1}{2}J\omega_2^2 - \frac{1}{2}J\omega_1^2 A=∫ω1ω2d(21Jω2)=21Jω22−21Jω12 角动量: L ⃗ 0 = r ⃗ × m v ⃗ \vec L_0 = \vec r \times m\vec v L
0=r
×mv
角动量定理: M ⃗ 0 = d L ⃗ 0 d t \vec M_0 = \frac{d\vec L_0}{dt} M
0=dtdL
0 角动量守恒定理:(有心力) 若 M 0 = 0 M_0 = 0 M0=0则 L ⃗ = 常 矢 量 \vec L = 常矢量 L
=常矢量 定轴转动的角动量: L ⃗ z = J z ω \vec L_z = J_z \omega L
z=Jzω 定轴转动的角动量定理: 若J为恒量 M ⃗ z = J z d w d t = J z β \vec M_z = J_z\frac{dw}{dt} = J_z \beta M
z=Jzdtdw=Jzβ 定轴转动的角动量守恒定理:(有心力) 若 M z = 0 M_z = 0 Mz=0则 L ⃗ z = J z ω = 常 矢 量 \vec L_z = J_z\omega = 常矢量 L
z【本文地址】