| 目标轮廓提取之边界跟踪法 | 您所在的位置:网站首页 › 基于边缘与角点相结合的目标提取与匹配算法实验报告 › 目标轮廓提取之边界跟踪法 |
目标轮廓提取之边界跟踪法
|
1 引言
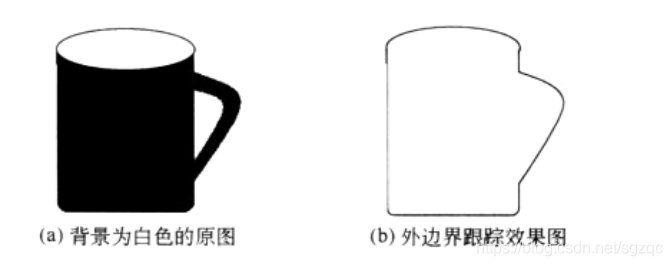
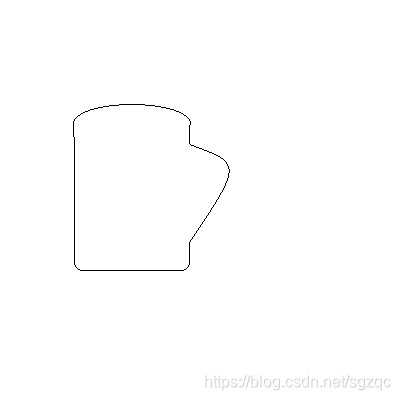
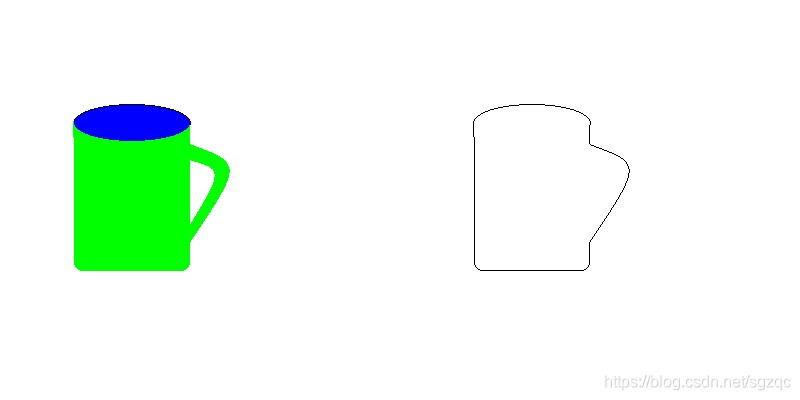
上一篇我们介绍了目标轮廓提取法来提取目标轮廓,这一章节我们来介绍边界跟踪法。边界跟踪的定义为从图像中的一个边界点出发,然后根据某种判别准则搜索出下一个边界点,以此跟踪出目标边界。 边界跟踪算法原理: 1)从左下角开始逐点扫描,当遇到边缘点时,则跟踪,直至跟后续点回到起始点(对于闭合线),或其后续点在没有新的后续点(对于非闭合线)为止。 2)如果为非闭合线,则跟踪一侧后,需从起始点开始朝相反方向跟踪到另一尾点。 3)如果不止一个后续点,则按上述连接准则选择距离最近的点为后续点,另一次近的后续点作为新的边缘跟踪起点另行跟踪。 4)一条线跟踪完后,接着扫描到下一个未跟踪点,直到所有边缘都跟踪完毕。 我们来举个栗子吧: 注意:中心像素可以跟踪的方向有8个,对每个方向制定了方向编号以及偏移量,如下图所示。一般来说,通常选取图像的最左下角的像素点作为起点。 结果如下: 结果如下: 结果如下: 4)边界跟踪 参考上述原理,进行实现,代码如下: # 从左上角查找开始 def get_left_up_start_pt(bin_img): h = bin_img.shape[0] w = bin_img.shape[1] find = 0 start_i = 0 start_j = 0 for i in range(h): for j in range(w): if bin_img[i][j] == 0: find = 1 start_i = i start_j = j break return find,start_i,start_j def trace_contour(bin_img,find,start_i,start_j): contour_img = np.zeros(shape=(bin_img.shape), dtype=np.uint8) contour_img += 255 if find: contour_img[start_i][start_j] = 0 Direct = [(-1,1),(0,1),(1,1),(1,0),(1,-1),(0,-1),(-1,-1),(-1,0)] BeginDirect = 0 findstart = 0 cur_i = start_i cur_j = start_j while findstart==0 : findpoint = 0 while findpoint==0: i = cur_i + Direct[BeginDirect][1] j = cur_j + Direct[BeginDirect][0] pixel = bin_img[i][j] if pixel==0: findpoint = 1 cur_i = i cur_j = j if cur_i ==start_i and cur_j == start_j: findstart = 1 contour_img[cur_i][cur_j] = 0 BeginDirect-=1 if BeginDirect == -1: BeginDirect = 7 BeginDirect-=1 if BeginDirect == -1: BeginDirect = 7 else: BeginDirect += 1 if BeginDirect == 8: BeginDirect = 0 return contour_img # 调用 find, start_i, start_j = get_left_up_start_pt(bin_img) contour_img = trace_contour(bin_img,find,start_i,start_j)结果如下: 通过上述简单步骤,我们实现了物体边界跟踪,相应的处理效果如下: 上图中 左侧为原图,右侧为我们提取的物体边界跟踪效果图。 关注公众号《AI算法之道》,获取更多AI算法资讯。
|
 边界跟踪的一般步骤如下: 1)确定边界的起始搜索点,起始点的选择很关键,对于某些图像,选择不同的起始点会导致不同的结果 2)确定合适边界判别准则和搜索准则,判别准则主要用于判断一个点是不是边界点,搜索准则则知道如何搜索下一个边缘点。 3)确定搜索的终止条件。
边界跟踪的一般步骤如下: 1)确定边界的起始搜索点,起始点的选择很关键,对于某些图像,选择不同的起始点会导致不同的结果 2)确定合适边界判别准则和搜索准则,判别准则主要用于判断一个点是不是边界点,搜索准则则知道如何搜索下一个边缘点。 3)确定搜索的终止条件。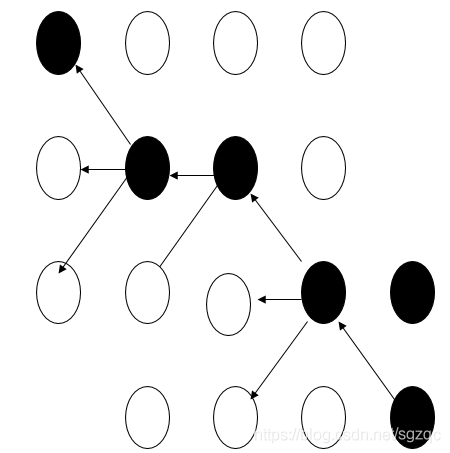 上图为边界跟踪示意图,图中黑点表示边界点,白点为图像的内部点。
上图为边界跟踪示意图,图中黑点表示边界点,白点为图像的内部点。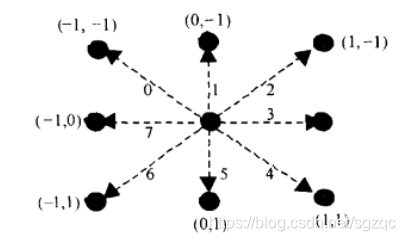
 2) 彩色图像灰度化
2) 彩色图像灰度化 3) 图像二值化
3) 图像二值化

【本文地址】
公司简介
联系我们