| 直角坐标,柱坐标,球坐标变换 | 您所在的位置:网站首页 › 坐标系xyz英文全写 › 直角坐标,柱坐标,球坐标变换 |
直角坐标,柱坐标,球坐标变换
|
坐标系几何
直角坐标(Cartesian),柱坐标(Cylindrical),球坐标(Spherical)之间的变换的结果非常容易在网上找到,但是推到过程不是那么的完善, 在这里记录一下。它们三者都是欧氏几何右手坐标系。
 柱坐标系
柱坐标系
x = ρ c o s ( ϕ ) = r s i n θ c o s ϕ x = \rho cos(\phi) = rsin\theta cos\phi x=ρcos(ϕ)=rsinθcosϕ y = s i n ϕ = r s i n θ s i n ϕ y = sin\phi = rsin\theta sin\phi y=sinϕ=rsinθsinϕ z = r c o s θ z=rcos\theta z=rcosθ ρ = x 2 + y 2 = r s i n θ \rho = \sqrt[]{x^2+y^2} = rsin\theta ρ=x2+y2 =rsinθ ϕ = t a n − 1 ( y / x ) \phi = tan^{-1}(y/x) ϕ=tan−1(y/x) z = r c o s θ z = rcos\theta z=rcosθ r = x 2 + y 2 + z 2 = ρ 2 + z 2 r = \sqrt{x^2 + y^2 + z^2} = \sqrt{\rho ^2 + z^2} r=x2+y2+z2 =ρ2+z2 θ = t a n − 1 x 2 + y 2 z = t a n − 1 ( ρ / z ) \theta = tan^{-1} \frac{ \sqrt[]{x^2+y^2}}{z} = tan^{-1}(\rho/z) θ=tan−1zx2+y2 =tan−1(ρ/z) ϕ = t a n − 1 ( y / x ) \phi = tan^{-1}(y/x) ϕ=tan−1(y/x) 单位向量变换涉及到向量之后,坐标系变换就变得有点复杂。我们有时候需要将写在三种不同的坐标系下的向量相互变换。本文的重点也是在讨论这些变换矩阵是怎么来的。我们把坐标系单位向量写成 ( a x , a y , a z ) (\mathbf{a_x, a_y, a_z}) (ax,ay,az), ( a ρ , a ϕ , a z ) (\mathbf{a_\rho, a_\phi, a_z}) (aρ,aϕ,az), ( a r , a θ , a ϕ ) (\mathbf{a_r, a_\theta, a_\phi}) (ar,aθ,aϕ) 直角坐标与柱坐标
a ρ = a x c o s ϕ + a y s i n ϕ + a z 0 \mathbf{a_\rho} = \mathbf{a_x}cos\phi + \mathbf{a_y}sin\phi + \mathbf{a_z}0 aρ=axcosϕ+aysinϕ+az0 a ϕ = a x ( − s i n ϕ ) + a y c o s ϕ + a z 0 \mathbf{a_\phi} = \mathbf{a_x}(-sin\phi) + \mathbf{a_y}cos\phi + \mathbf{a_z}0 aϕ=ax(−sinϕ)+aycosϕ+az0 a z = a x 0 + a y 0 + a z 1 \mathbf{a_z} = \mathbf{a_x}0 + \mathbf{a_y}0 + \mathbf{a_z}1 az=ax0+ay0+az1 我们改写成矩阵的格式那么就变成了 同理与上文,因为柱坐标与球坐标共享了
ϕ
\phi
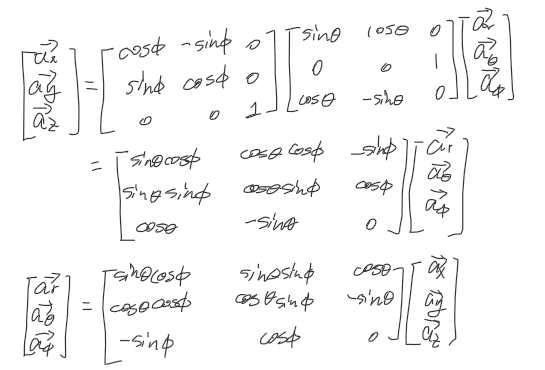
ϕ,我们可以有下图: 利用柱坐标系的变换我们可以轻松的利用矩阵乘法得到直角坐标系与球坐标系之间的变换
|


 因为直角坐标与柱坐标之间共享z,所以我们不用考虑z的改变,我们画出上图。然后加点辅助线,如下图所示:
因为直角坐标与柱坐标之间共享z,所以我们不用考虑z的改变,我们画出上图。然后加点辅助线,如下图所示:  现在就可以很轻松的写出
现在就可以很轻松的写出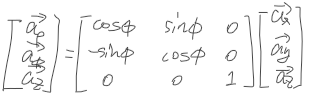 逆变换就是把矩阵转置一下
逆变换就是把矩阵转置一下 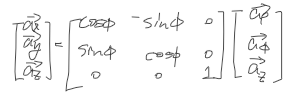
 我们可以得出:
我们可以得出: 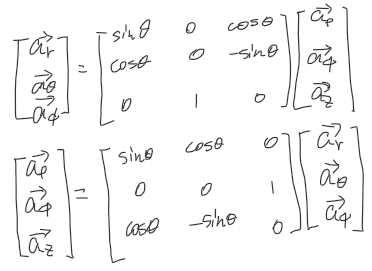
 以上。
以上。【本文地址】