| 一文了解单线激光扫描系统的标定与成像原理 | 您所在的位置:网站首页 › 单线激光雷达的组成部件 › 一文了解单线激光扫描系统的标定与成像原理 |
一文了解单线激光扫描系统的标定与成像原理
|
单线激光扫描系统简介 单线激光系统标定原理 单线激光系统重建原理介绍
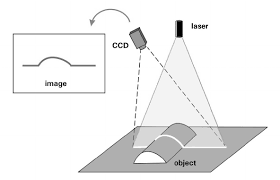
单线激光扫描系统简介 单线激光扫描系统由单线激光器和2d相机组成。激光器投射出一条激光线,在三维空间中构成一个激光平面,与待测物体的曲面相交,形成一条曲线,该曲线被相机拍摄到后,通过三角测量原理,可得这一曲线上每点的三维坐标。
单线激光系统标定原理 单线激光系统标定工作主要完成相机标定和激光平面方程的确定。相机标定是确定相机的像素坐标与世界坐标系之间的关系,即相机内参和外参。 具体的操作过程 准备一个尺寸已知的标定板,可以是棋盘格标定板也可以是halcon7*7圆标定
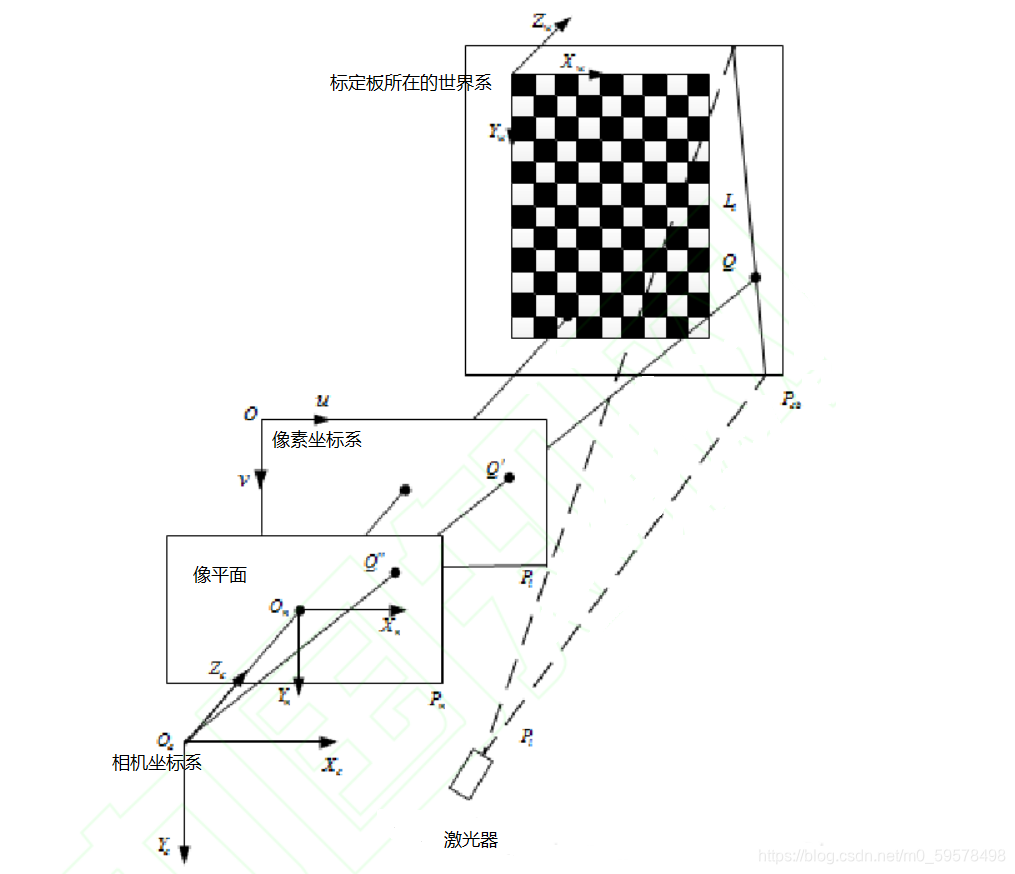
原理推导 1.相机模型介绍 假设相机是基于针孔模型,
定义一下坐标系,标定板所定义的坐标系为世界坐标系;相机坐标系是以光心为圆心,光轴为Z所定义的坐标系;像平面为CCD所在平面为像平面,像素坐标系是令CCD中x方向和y方向像元尺寸各为1所定义的坐标系
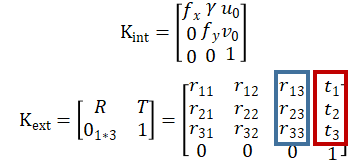
通过张正友标定法,可标出内外参,网络上支持该标定法的工具非常多,此处不再赘述。 2.计算标定板在相机坐标系中的平面方程 对相机标定后,可得相机内外参,
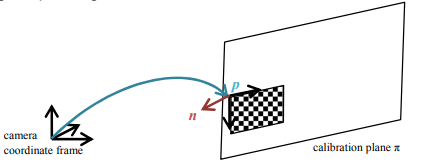
由下图可知,标定板所在平面法向量为n,在相机坐标系下为旋转矩阵的最后一列,标定板上的原点p,在相机坐标系下为平移向量T。
一个法向量n和一个在平面中的点p即可写出该平面的表达式为: 令
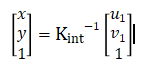
定义d=-n*p,则平面方程可表示为 3.计算与标定板平面相交位置处的激光线三维坐标 线激光投射出的激光线在三维空间中构成一个激光平面,激光平面与标定板所在平面相交,形成一条线,该线被相机拍摄下来,通过线检测算法,可提取标定板上的这条激光线,线上任一点的像素坐标,表示为, 借助相机内参矩阵,像素坐标可变换为相机坐标下焦距为1处的坐标,表示为 根据射线的表示方法,可知,以原点为起点,向量 该射线与标定板平面相交,那么该点坐标同时会满足标定板平面方程,即
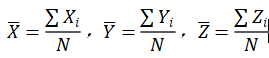
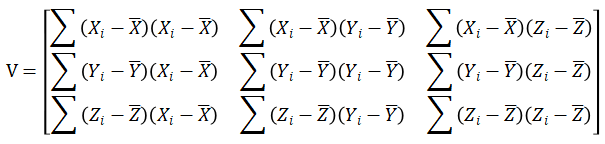
可求得该交点坐标为 通过该方法可把不同标定板姿态下(每种姿态下的标定板不互相平行)激光线上的点坐标求出来。 4.求解激光平面方程 根据上步骤求出的激光平面上N个三维点坐标,估计激光平面方程。 计算这组三维点的质心, 去质心处理,即每个三维点坐标减去质心坐标,构成新的去质心坐标。 求解去质心坐标的协方差矩阵 对协方差矩阵SVD分解,最小特征值对应的特征向量,即激光平面的法向量,
激光平面方程 单线激光系统重建原理介绍 首先提取激光线,线上任意一点的像素坐标可表示为 借助相机内参矩阵,像素坐标可变换为相机坐标下焦距为1处的坐标,表示为 根据射线的表示方法,可知,以原点为起点,向量 该射线与标定板平面相交,那么该点坐标同时会满足标定板平面方程,即
可求得该交点坐标为 |




【本文地址】
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |