| 卫星轨道推演计算相关知识点总结(含欧拉角、旋转矩阵、及各坐标系转化等) | 您所在的位置:网站首页 › 六g卫星发射 › 卫星轨道推演计算相关知识点总结(含欧拉角、旋转矩阵、及各坐标系转化等) |
卫星轨道推演计算相关知识点总结(含欧拉角、旋转矩阵、及各坐标系转化等)
|
卫星轨道推演计算相关基础知识点总结
一、卫星的运动特性二、卫星的空间坐标系(1)地心惯性坐标系(ECI×J2000历元坐标系)(ECSF 地心空间坐标系)(2)地心固定坐标系(ECF)(WGS84坐标系)(3)地心地固坐标系(ECEF)(4)地心椭球惯性坐标系(ECEI)(地心黄道惯性坐标系)
三、根据轨道根数计算卫星位置(1)计算卫星在轨道坐标系下的位置(2)轨道坐标系与大地坐标系间的换算(3)轨道坐标系与大地坐标系间的换算
四、空间几何关系相关知识点及C++代码(1)欧拉角、旋转向量和旋转矩阵的相互转换
近期在补卫星仿真领域的相关基础知识,并总结一些卫星轨道计算的算法与工具类代码函数。 参考内容见百度公开文库文档与PPT: https://max.book118.com/html/2019/0309/5304232023002020.shtm https://wenku.baidu.com/view/e231b968a32d7375a417806b.html?rec_flag=default&fr=Recommend_RelativeDoc-60272,60321,40155,40311,40251,60314,40300-kpdrec_doc_pc_view-bf93f0936bec0975f465e2dd&sxts=1629169656038 一、卫星的运动特性
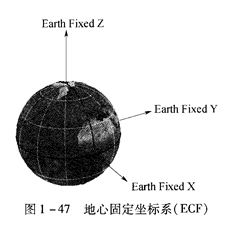
地心惯性坐标系是太阳系内的一个惯性坐标系,不随地球而转动,也不受地球、DAC6574IDGS太阳运行的章动和岁差的影响。其坐标原点位于地心Oe;OeX轴位于赤道平面内,指向特定某一年(历元时刻)的太阳春分点位置,每年春分点均会发生变动;OeZ轴指向某一年(历元时刻)地球北极的平均位置处,即地球平均自转极点(CIO);OcY轴位于赤道平面内,与0eX轴垂直,且与OeX、OeZ构成满足右手定则的笛卡儿直角坐标系。 由于采用的历元时间不同,可以有各种不同的地心惯性坐标系,目前国际上通用的地心惯性坐标系是J2000历元坐标系,它是以公元2000年的春分点为基准的历元坐标系。 (2)地心固定坐标系(ECF)(WGS84坐标系)如图所示,地心固定坐标系的坐标原点位于地心Oe,OeZ轴指向地球北极,OeX轴位于赤道平面内指向地理经度的零点,OeY轴根据右手定则确定。地心固定坐标系为笛卡尔直角坐标系,该坐标系在宇宙空间中相对地球静止,伴随地球自转和公转。 地心地固坐标系的坐标原点位于地心Oe,OeZ轴指向地球平均自转极点(CIO),OeX轴位于赤道平面内指向子午线与赤道交点,OeY轴根据右手定则确定。地心地固坐标系为笛卡尔直角坐标系,该坐标系在宇宙空间中相对地球静止,伴随地球自转和公转。 (4)地心椭球惯性坐标系(ECEI)(地心黄道惯性坐标系)地心椭球惯性坐标系的坐标原点位于地心Oe,OeZ轴指向椭球极轴(黄道极-地球公转 轨迹在地球表面投影轨迹形成),OeX轴位于赤道平面内,指向特定某一年(历元时刻)的太阳春分点位置,每年春分点均会发生变动,OeY轴根据右手定则确定。地心地固坐标系为笛卡尔直角坐标系,该坐标系在宇宙空间中相对地球静止,伴随地球自转和公转。 三、根据轨道根数计算卫星位置 (1)计算卫星在轨道坐标系下的位置轨道根数(或称轨道要素或轨道参数)是描述在牛顿运动定律和牛顿万有引力定律的作用下的天体或航天器,在其开普勒轨道上运动时,确定其轨道所必要的六个参数。由于运动的方式有许多种的参数表示法,依照选定的测量装置不同,对相同的轨道,有几种不同的方式来定义轨道根数。 轨道半长轴:椭圆轨道长轴的一半,有时可视作平均轨道半径。 轨道离心率:为椭圆扁平程度的一种量度,定义是椭圆两焦点间的距离与长轴长度的比值。 就是e=c/a。 轨道倾角:行星轨道面对黄道面的倾角;在升交点处从黄道面逆时针方向量到行星轨道面的角度。 升交点赤经:行星轨道升交点的黄道经度。 近日点幅角:从升交点沿行星运动轨道逆时针量到近日点的角度。 平近点角:行星对应于t0时卫星的平近点角。
欧拉角和旋转矩阵相互转换的C++代码如下所示: Mat eulerAnglesToRotationMatrix(Vec3f &theta) { // Calculate rotation about x axis Mat R_x = (Mat_(3,3) x = atan2(R.at(2,1) , R.at(2,2)); y = atan2(-R.at(2,0), sy); z = atan2(R.at(1,0), R.at(0,0)); } else { x = atan2(-R.at(1,2), R.at(1,1)); y = atan2(-R.at(2,0), sy); z = 0; } #if 1 x = x*180.0f/3.141592653589793f; y = y*180.0f/3.141592653589793f; z = z*180.0f/3.141592653589793f; #endif return Vec3f(x, y, z); }这里存一下项目开发过程中常用的一些计算需求,例如根据旋转前后的两个向量求二者之间的旋转矩阵,C++代码如下所示: AcGeVector3d CrossProduct(AcGeVector3d a, AcGeVector3d b) { AcGeVector3d c; c.x = a.y * b.z - a.z * b.y; c.y = a.z * b.x - a.x * b.z; c.z = a.x * b.y - a.y * b.x; return c; } double DotProduct(AcGeVector3d a, AcGeVector3d b) { double result; //result = a[0] * b[0] + a[1] * b[1] + a[2] * b[2]; result = a.x * b.x + a.y * b.y + a.z * b.z; return result; } double Absolute(AcGeVector3d v) { double result; result = sqrt(v.x * v.x + v.y * v.y + v.z * v.z); return result; } AcGeMatrix3d RotationMatrix(double angle, AcGeVector3d u) { double norm = Absolute(u); u.x = u.x / norm; u.y = u.y / norm; u.z = u.z / norm; AcGeMatrix3d rotatinMatrix; rotatinMatrix.entry[0][0] = cos(angle) + u.x * u.x * (1 - cos(angle)); rotatinMatrix.entry[0][1] = u.x * u.y * (1 - cos(angle)) - u.z * sin(angle); rotatinMatrix.entry[0][2] = u.y * sin(angle) + u.x * u.z * (1 - cos(angle)); rotatinMatrix.entry[0][3] = 0.0; rotatinMatrix.entry[1][0] = u.z * sin(angle) + u.x * u.y * (1 - cos(angle)); rotatinMatrix.entry[1][1] = cos(angle) + u.y * u.y * (1 - cos(angle)); rotatinMatrix.entry[1][2] = -u.x * sin(angle) + u.y * u.z * (1 - cos(angle)); rotatinMatrix.entry[1][3] = 0.0; rotatinMatrix.entry[2][0] = -u.y * sin(angle) + u.x * u.z * (1 - cos(angle)); rotatinMatrix.entry[2][1] = u.x * sin(angle) + u.y * u.z * (1 - cos(angle)); rotatinMatrix.entry[2][2] = cos(angle) + u.z * u.z * (1 - cos(angle)); rotatinMatrix.entry[2][3] = 0.0; rotatinMatrix.entry[3][0] = 0.0; rotatinMatrix.entry[3][1] = 0.0; rotatinMatrix.entry[3][2] = 0.0; rotatinMatrix.entry[3][3] = 1.0; return rotatinMatrix; } AcGeMatrix3d CalculationMtrix(AcGeVector3d vectorBefore, AcGeVector3d vectorAfter) { double rotationAngle = acos(DotProduct(vectorBefore, vectorAfter) / Absolute(vectorBefore) / Absolute(vectorAfter)); AcGeVector3d rotationAxis = CrossProduct(vectorBefore, vectorAfter); AcGeMatrix3d rotationMatrix = RotationMatrix(rotationAngle, rotationAxis); return rotationMatrix; }未完待续 ,后面如果又涉及到卫星仿真的相关项目再进行更新完善。 努力补课的乔木小姐 |













 任何一个旋转可以表示为依次绕着三个旋转轴旋三个角度的组合,这三个角度成为欧拉角。对于在三维空间里的一个参考系,任何坐标系的取向都可以用欧拉角来表示,如图所示,蓝色为起始坐标系,红色为旋转之后的坐标系。
任何一个旋转可以表示为依次绕着三个旋转轴旋三个角度的组合,这三个角度成为欧拉角。对于在三维空间里的一个参考系,任何坐标系的取向都可以用欧拉角来表示,如图所示,蓝色为起始坐标系,红色为旋转之后的坐标系。  因此欧拉角转为旋转矩阵的公式如下:
因此欧拉角转为旋转矩阵的公式如下: 
【本文地址】