| 数字信号处理实验 | 您所在的位置:网站首页 › 信号系统零极点相消求零状态 › 数字信号处理实验 |
数字信号处理实验
|
一.各种函数的用法 1.tf2zp函数:通常用于将传递函数(Transfer Function)转换为零极增益形式(ZPK form),转换前G(s) = num(s) / den(s),转换后G(s) = K * (s - z1) * (s - z2) * ... * (s - zn) / (s - p1) * (s - p2) * ... * (s - pn) 2.zp2tf函数:用于将零极增益形式(ZPK form)转换为传递函数(Transfer Function)形式。转换前G(s) = K * (s - z1) * (s - z2) * ... * (s - zn) / (s - p1) * (s - p2) * ... * (s - pn),转换后G(s) = num(s) / den(s) 3.tf2sos函数:用于将传递函数(Transfer Function)转换为其次数最低的分数形式(SOS form,即Sum-of-Squares form)。转换前,G(s) = num(s) / den(s),转换后G(s) = a0 + a1*s + a2*s^2 + b1*s + b2*s^2 + ... 4.sos2tf函数:用于将SOS形式(Sum-of-Squares form)转换为传递函数(Transfer Function)形式,转换前G(s) = a0 + a1*s + a2*s^2 + b1*s + b2*s^2 + ...转换后G(s) = num(s) / den(s), 5.sos2zp函数:用于将SOS形式(Sum-of-Squares form)转换为零极增益形式(Zero-Pole-Gain form),转换前G(s) = a0 + a1*s + a2*s^2 + b1*s + b2*s^2 + ...,转换后G(s) = K * (s - z1) * (s - z2) * ... * (s - zn) / (s - p1) * (s - p2) * ... * (s - pn) 6.zp2sos函数:一种从零极增益形式(ZPK form)转换为二次分式形式(SOS form)的转换函数。它接受系统函数的零-极点增益模型中零点向量z、极点向量p和增益系数k作为输入,并返回系统函数的二次分式模型的系数矩阵sos和增益系数g。转换前G(s) = K * (s - z1) * (s - z2) * ... * (s - zn) / (s - p1) * (s - p2) * ... * (s - pn),转换后G(s) = a0 + a1*s + a2*s^2 + b1*s + b2*s^2 + ... 7.ss2tf函数:用于将状态空间模型(State-Space model)转换为传递函数(Transfer Function)模型,转换前x' = Ax + Bu y = Cx + Du转换后G(s) = num(s) / den(s) 8.tf2ss函数:用于将传递函数(Transfer Function)模型转换为状态空间模型(State-Space model),转换前G(s) = num(s) / den(s),转换后x' = Ax + Bu y = Cx + Du 二、系统函数如下
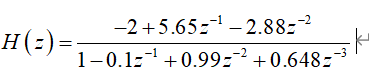
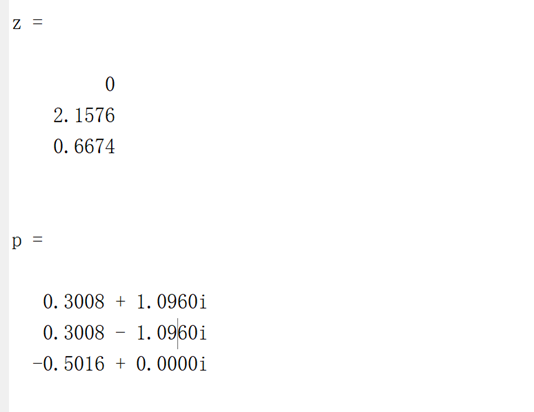
试求出: 极点增益(zpk)模型,用公式编辑器写出其表达式; 极点留数(rpk)模型,用公式编辑器写出其表达式; 二次分式(sos)模型,用公式编辑器写出其表达式。 极点增益(zpk)模型 a=[-2,5.65,-2.88,0]; b=[1,-0.1,0.99,0.648]; [z,p,k]=tf2zp(a,b) %因式分解系统函数
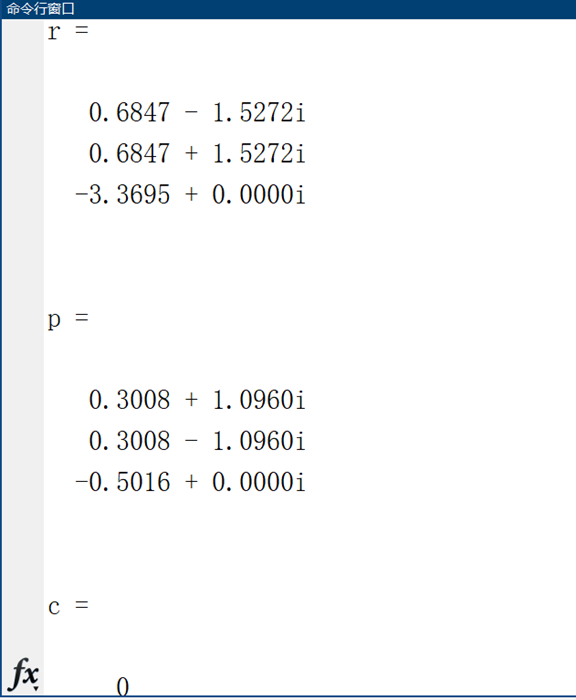
极点留数(rpk)模型 b=[-2,5.65,-2.88,0]; a=[1,-0.1,0.99,0.648]; [r, p, c] = residuez(b, a) %极点求留数
二次分式(sos)模型 num =[-2,5.65,-2.88]; den =[1,-0.1,0.99,0.648]; [A,B]=tf2sos(num,den) %将系统传递函数转换为系统函数二次分式模型
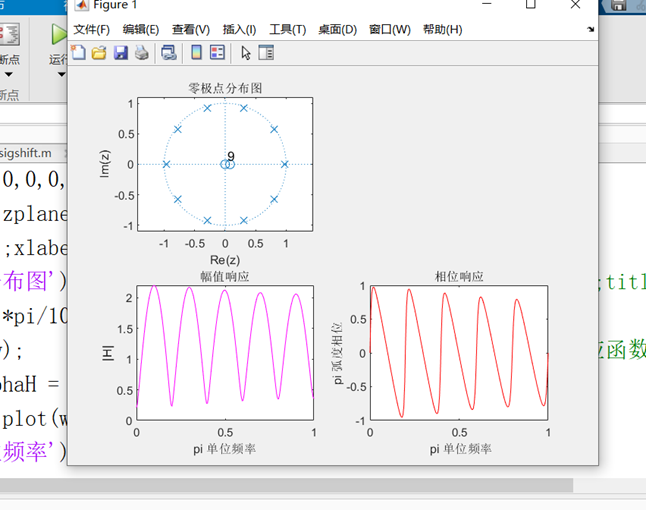
三.LTI的系统函数如下
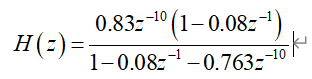
试分析: 系统的零极点分布,并绘图; 单位冲击响应,并绘图; 分析系统的稳定性; 求出系统的幅频特性和相频特性,并绘图。 a=[0.83,-0.0664]; b=[1,-0.08,0,0,0,0,0,0,0,0,-0.763,0]; subplot(2,2,1);zplane(a,b); ylabel('Im(z)');xlabel('Re(z)'); title('零极点分布图'); %零极点分布图 subplot(2,2,2); impz(a,b,200);title('系统单位冲激响应'); w = [0:0.5:100]*pi/100; H = freqz(b,a,w); %系统的频率响应函数 magH = abs(H);phaH = angle(H); %取角度的绝对值 subplot(2,2,3);plot(w/pi,magH,'m'); xlabel('pi 单位频率'); ylabel('|H|'); title('幅值响应'); %系统的幅频响应 subplot(2,2,4); plot(w/pi,phaH,'r'); xlabel(' pi 单位频率'); ylabel('pi 弧度相位'); title('相位响应'); %系统的相频响应
|

【本文地址】