| 国外地面无人系统发展综述 | 您所在的位置:网站首页 › 以色列自主汽车品牌 › 国外地面无人系统发展综述 |
国外地面无人系统发展综述
|
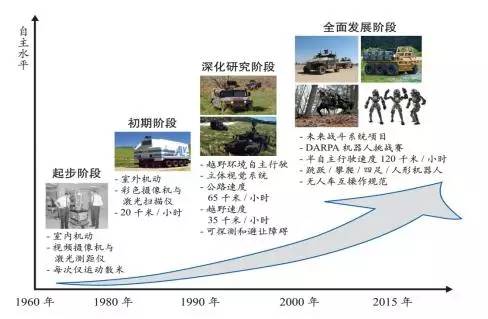
国外自主地面无人系统的发展始于上世纪60年代,迄今主要经历了4个阶段:(见图1)
图1:国外地面无人系统发展历程 20世纪60年代至80年代初:这一阶段的研究还没有被赋予明确的军事需求和目的,研究工作主要集中于可以实现室内自主机动的地面移动机器人,限于当时的视觉处理技术水平,早期的地面机器人1小时仅能移动数米。 20世纪80代年代至90年代初:DARPA通过“战略计算计划”开展自主陆地车辆项目研究,以推动室外自主机动无人车技术的发展,研制出首辆最高车速达到20千米/秒的自主越野无人车。 20世纪90年代至21世纪初:这一时期的研究以美国DARPA和美国陆军开展的DEMO Ⅱ和DEMO Ⅲ计划为代表,研究重点是无人车半自主越野机动技术,DEMO Ⅲ计划的试验无人车在公路上的行驶速度达到65千米/时,在野外环境下可以达到35千米/时,对于正障碍和负障碍都能检测和避让。 21世纪初至今:这一时期半自主地面无人系统发展成熟并投入使用,以色列装备的“守护者”半自主无人车最大速度为80千米/时,能够探测与规避障碍,可自主“跟随”车辆或士兵行进。这一时期美、英、以等国还开始开展有人-无人系统以及无人系统间的协同技术研究,以发展地面无人系统协同作战能力。 发展现状 进入21世纪后,军用地面无人系统进入快速发展阶段,已经被逐步纳入新一代武器装备体系。除美国外,以色列、法国、德国、英国、日本、俄罗斯等都开始加入研制行列。美国装备种类和数量最多,综合研制水平最高 美国2001年就提出了“2015年前实现1/3地面作战车辆为地面无人系统”的目标,虽然未如期实现,却有力推动了小型无人车(SUGV)、班组任务支援系统、“大狗”等军用地面无人系统的发展。近年来,美陆军陆续发布了《机器人战略白皮书》(2009年),《地面无人系统路线图》(2011年)、《机器人与自主系统战略2015年-2040年》(2015年)等文件,为发展地面无人系统提供指导。为加强统筹管理,美国2009年以陆军训练与条令司令部(TRADOC)下属的机动卓越中心为核心,成立了联合地面机器人集成团队(该机构成员包括陆军试验室、海军陆战队士兵实验室以及国防部其他机构。该机构是美国国防部范围内负责军用地面无人系统发展的高层管理机构,目标是为美军提供技术先进的无人系统,具体任务包括编制无人系统初始能力文件、为无人系统的研发与使用制定统一战略、确定能力需求等),专门负责军用地面无人系统发展。 目前,美国装备的地面无人系统型号和数量最多,装备数量超过1万套,约占全球地面无人装备总量的80%,包括“魔爪”系列、“派克波特”系列、M160远程遥控扫雷系统、“侦察兵”XT机器人等,且许多型号已在阿富汗和伊拉克战场得到广泛应用,如“魔爪”IV机器人,采用履带式行走装置,最高行驶速度8.4千米/时,机械臂完全伸展时可举起4.54千克的重物。 美国地面无人系统研制处于全球范围最高水平,比如“大狗”和“猎豹”四足仿生机器人都充分表明了美国在地面无人系统研制方面拥有着雄厚的实力。“大狗”四足机器人重约109千克,最大负载180千克,最高行驶速度8千米/时,可以完成急走、奔跑、跳跃、下蹲、爬行等动作,适用于山地等复杂地形环境。 此外,美国还大力发展机器人士兵。波士顿动力公司研制的“阿特拉斯”人形机器人体形和大小与人体相近,重150千克,高1.88米,躯干厚0.56米,肩宽0.76米,具有大步行走、单腿站立、跳跃、躲避障碍物、防摔等特点。美国海军实验室的“人工智能应用研究中心”亦开发出一款可在舰艇消防中应用的“灭火机器人”。 以色列自主无人车装备和研制水平处于世界前列 以色列发展重点集中于中型自主无人车领域,其装备和研制水平均处于世界前列。现已装备了“前卫”和“守护者”无人车,其中“守护者”MK.1是目前世界上第一种已经装备部队、具有一定自主能力的地面无人系统,代表国外现役地面无人系统的最高自主水平,最高行驶速度达80千米/时,能自主设定行驶路线、规避障碍,具有自主“跟随”行进模式,可与其他地面无人系统协同作战。
欧洲国家紧随美以两国发展步伐,已实现装备应用 英、法、德等国是除美国和以色列之外,地面无人系统发展最快的国家,目前均已装备并正在积极发展多款地面无人系统。其中,英国现装备有“手推车”MK.8地面无人系统,CYCLOPS小型地面无人系统,正研发SATURN侦察地面无人系统、MACE大型多用途地面无人系统;法国现装备有AMX-30 B2、“卡梅伦”、“卡博”等地面无人系统,正研发CITV、CMAG-1等地面无人系统;德国现装备有“地雷破坏者”扫雷地面无人系统、TELEMAX排爆机器人、TEODOR排爆地面无人系统,正研发FOXBOT、ROBOSCOUT等地面无人系统。 日本机器人生产和应用能力全球领先 日本在军用机器人领域开展的研究不多,但作为世界上工业机器人生产和应用领域的领先国家,日本在军用地面无人系统方面的研发实力不容小觑。日本SCHAFT公司、FANUC公司、安川电机公司、川崎重工业株式会社、松下公司、那智不二越公司、OTC公司、爱普生公司、三菱电机等公司的机器人产品在世界市场占有重要地位。日本SCHAFT公司的HRP-2双足机器人曾在2013年DARPA组织的机器人挑战赛初赛中获得第一名,该机器人高1.48米,重95千克,臂展达1.3米,在比赛中出色地完成了爬楼梯、在废墟中行走和移除障碍物等任务。日立工程研究实验室现已研制出一种能随着地形的变化而改变其外形的可变形态式履带样车模型。 俄罗斯无人系统研发启动较晚,进展迅速 俄罗斯在本世纪的第二个十年开始时才集中科研力量和资金进行无人系统攻关,并在2013年由国防部制定了2025年前俄军特种机器人发展专项规划。不过借助此前有人地面作战车辆领域的技术积累,俄罗斯地面无人系统的研发速度很快,目前已实现了批量生产和装备。2015年底,俄罗斯国防出口公司展示了三款新型“乌兰”系列无人车,功能涵盖消防、扫雷和战斗。目前俄罗斯信号科学研究所还在研制类似于美国“大狗”的“山猫”(RYS/LYNX)四足机器人,该机器人将用于侦察、火力支援、扫雷、医疗后送、后勤支援和战斗工程侦察等领域,计划在2019年上半年进行试验。 发展趋势 自主地面无人系统实用化进程加快 目前以色列已率先列装了具有感知、理解、分析、通信、规划能力的半自主和自主地面无人系统,用于执行火力支援、巡逻、后勤保障等任务。“守护者”MK.2无人车有效载荷为1200千克,可配装障碍探测与规避模块、指挥控制系统、各种模块化武器站、通信组件和后勤保障组件等,具备全天侯感知能力,能够自主决策,可自主“跟随”车辆或士兵行进。正在研发的“守护者”MK.3型无人车,半自主模式下的最高车速可达120千米/时,首辆样车已在2012年交付以色列国防军进行评估测试。 美国陆军在“未来战斗系统”项目中,首次将自主地面无人系统纳入到未来一体化陆军武器装备体系之中。虽然该项目已终止,但美国自主地面无人系统的发展并没有停滞。目前美国已经发布了第一版无人车互操作规范,正在制定无人系统接口标准,开发地面无人系统通用架构,开展无人-有人系统协同作战研究,在自主控制、自主导航、环境感知、足式行走机构、人机交互、无人系统互操作等领域取得了一系列进展。美陆军预计,到2020年自主地面无人系统可以在部队初步应用于运输、巡逻、检测等简单任务;到2030年,可以实现有人-无人系统的智能编队和协同行动以及车队自主护送任务;到2040年可以实现合成兵力机动。 探索地面无人-有人装备协同作战 与有人装备协同作战是各类军用无人系统未来的重要使用方式,目前美英等国都在积极开展相关研究。美陆军制定了30年地面无人系统作战计划,把地面无人系统的研究、开发、测试和评估与陆军部队现代化的需求相协调和同步,设想将建设一支由有人-无人系统团队组成的现代化部队。此外,美陆军在其未来远征机动能力建设构想中,提出未来一个坦克排将由现在的6辆主战坦克改成由2辆有人指挥控制车外加4辆无人驾驶坦克组成,这样可将一个坦克排的总重量由目前的280余吨减轻到200吨以内,从而大大提高陆军战略机动能力。 仿生地面无人系统的发展将倍受关注 仿生技术是推动无人系统创新发展的一项重要技术,目前国外在新型地面无人系统、微型无人系统的研制中愈加注重仿生技术的应用。例如以机械腿步行方式行走,能够使地面无人系统穿越树丛和陡峭地形等轮式和履带式行走装置难以征服的区域。目前美国、德国和日本等国家已推出多种仿生机器人,美国主要发展了“大狗”和“猎豹”四足仿生机器人、“沙蚤”跳跃机器人、“阿特拉斯”人形机器人等,其中“大狗”四足仿生机器可完成下蹲、爬行等动作;“猎豹”仿生机器人20米冲刺速度高达46千米/小时;“沙蚤”跳跃机器人最高可跳跃9米;“阿特拉斯”人形机器人高1.88米,具有大步行走、单腿站立、跳跃、上下楼梯、躲避障碍物、防摔等功能。
关键技术 系统架构设计技术 系统架构设计技术是自主地面无人系统结构和行为的总体技术,包括硬件和软件部件的功能描述以及这些部件之间的接口。目前美国已开发了无人系统联合架构、4D/RCS参考架构、自主协同和组队架构、基于SAE AS5684协议的模块化架构、导航用智能架构等架构概念。其中无人系统联合架构是无人系统标准化信息架构,用于提高无人系统子系统间的互操作性,并提供无人平台的重复利用和标准化。美军目前发展的大多数地面无人系统都兼容无人系统联合架构(JAUS),因此装备之间的互操作性得到提高,并有助于实现协同作战。 高适应行走系统技术 高适应行走系统技术包括履带式行走技术、轮式行走技术、复合式行走技术、足式行走技术等,其中足式行走技术是当前国外发展的热点。在驱动方式上,国外外形较大的足式机器人多采用电机驱动和液压驱动,微小型足式机器人多采用形状记忆合金驱动和气动人工肌肉驱动。美国的“班组任务支援系统”、“粉碎机”等无人平台采用铰接式独立悬挂与电动轮相结合的高适应行走机构,极大地提升了越障、越壕、爬坡等机动性能,并使轮式平台具备了灵活的差速转向能力和姿态控制能力。“大狗”四足仿生机器人依赖其完备的控制系统实现了抗冲击、防打滑的稳定控制能力。未来的高机动地面无人系统将基于更优化的行走系统设计、更高功率密度的驱动部件、更先进的行走机构综合控制方法研发,实现更加多样化、高适应的行走能力。 针对越野环境的感知技术 通过平台配备的环境感知传感器获得环境信息,并使综合决策控制系统能够理解的环境,是地面无人系统进行自主路径规划与决策的前提。一般采用多传感器融合的方法来获取环境信息,使用的传感器包括激光雷达、毫米波雷达、可见光摄像机、红外摄像机,根据传感器的性能指标进行优化组合,获得能够满足建模需求的传感器组合方案。美国“黑骑士”和“粉碎机”等地面无人系统的感知系统配置都采用了这一思路。以激光雷达为例,国外已有多家公司推出了系列化产品,用于地面无人系统的环境感知。在障碍检测方面,美国JPL实验室开发的基于双目视觉检测技术能在10米远处检测到宽度为60厘米的壕沟。地面材质识别目前仍是一个世界性难题。 自主控制技术 国外地面无人系统自主控制技术研究起步早,研发规模大、技术水平高,自主控制技术成熟度已达到5~6级水平,开发出了具有一定自主控制能力的地面无人系统,更重要的是在自主控制技术的载体——自主控制系统的体系架构、模块化软件组件、关键技术性能指标的测试评估等方面均已形成一整套标准,开始实现无人平台自主控制系统的工程化与产品化。例如以色列“守护者”MK.1地面无人系统是目前国外现役自主水平最高的无人车,该地面无人系统采用4×4底盘,能自主设定行驶路线、规避障碍、在网络中还可与其他“守护者”地面无人系统协同作战,最大行驶速度可达80千米/时。 安全与防护技术 地面无人系统安全与防护技术用于保障地面无人系统在运行过程中的自身安全,避免陷入危险境地,包括如何阻止未授权访问和使用地面无人系统及其有关信息的技术,以及研究如何设计无人平台的综合防护措施,提高综合防护等级,增强战场生存能力。国外这一技术领域研究较早,目前已经积累了较为丰富的经验。在信息安全方面,主要借鉴通信技术领域的安全技术,如加密技术、抗欺骗技术、抗劫持技术等;在防护方面主要借鉴坦克装甲车辆的综合防护技术。 动力技术 国外地面无人系统动力源主要包括活塞式发动机、铅酸电池、镍镉电池、锂电池和燃料电池。现阶段,国外小型地面无人系统动力大多使用锂离子电池组,不仅满足了小型平台对能源系统重量、体积、可充电及可靠性的要求,而且将能量密度从铅酸电池的30~50瓦时/千克提高到150瓦时/千克,并有望在未来几年内进一步提升至400瓦时/千克,显著增强了小型地面无人系统的持续工作能力。美国陆军坦克机动研发工程中心开发的丙烷固态氧化物燃料电池将小型机器人用电池组功率提高到150~250瓦。中型地面无人系统的动力技术很大程度上来自商业发动机市场,倾向于使用汽油机或超低硫柴油发动机。目前高功率能量存储设备(如电池组和超级电容器)能够推进车辆行驶64千米。此外,燃料电池、太阳能电池等新型动力能源虽然已被美国军方纳入无人平台新型动力研究之中,但目前仍基本处于试验探索阶段。 虽然地面无人系统已开始进入越来越多国家的装备序列,但这仅仅是地面无人系统应用的初级阶段,随着自主和互操作能力的提高以及制造成本的下降,地面无人系统的装备数量将会急剧增长、使用方式将更加灵活、作战功能将更加多样,在改变陆军战斗力生成模式的同时,也将带来陆战概念和方式的巨大变化。 一网打尽系列文章,请回复以下关查看: 创新发展:习近平 | 创新中国 | 创新创业 | 科技体制改革 | 科技创新政策 | 协同创新 | 成果转化 | 新科技革命 | 基础研究 | 产学研 | 供给侧 热点专题:军民融合 | 民参军 | 工业4.0 | 商业航天 | 智库 | 国家重点研发计划 | 基金 | 装备采办 | 博士 | 摩尔定律 | 诺贝尔奖 | 国家实验室 | 国防工业 | 十三五 预见未来:预见2016 |预见2020 | 预见2025 | 预见2030 | 预见2035 | 预见2045 | 预见2050 | 前沿科技:颠覆性技术 | 生物 | 仿生 | 脑科学 | 精准医学 | 基因 | 基因编辑 | 虚拟现实 | 增强现实 | 纳米 | 人工智能 | 机器人 | 3D打印 | 4D打印 | 太赫兹 | 云计算 | 物联网 | 互联网+ | 大数据 | 石墨烯 | 能源 | 电池 | 量子 | 超材料 | 超级计算机 | 卫星 | 北斗 | 智能制造 | 不依赖GPS导航 | 通信 | MIT技术评论 | 航空发动机 | 可穿戴 | 氮化镓 | 隐身 | 半导体 先进武器:中国武器 | 无人机 | 轰炸机 | 预警机 | 运输机 | 战斗机 | 六代机 | 网络武器 | 激光武器 | 电磁炮 | 高超声速武器 | 反无人机 | 防空反导 | 潜航器 | 未来战争:未来战争 | 抵消战略 | 水下战 | 网络空间战 | 分布式杀伤 | 无人机蜂群 领先国家:俄罗斯 | 英国 | 日本 | 以色列 | 印度 前沿机构:战略能力办公室 | DARPA | Gartner | 硅谷 | 谷歌 | 华为 | 俄先期研究基金会 前沿人物:钱学森 | 马斯克 | 凯文凯利 | 任正非 | 马云 专家专栏:黄志澄 | 许得君 | 施一公 | 王喜文 | 贺飞 | 李萍 | 刘锋 | 王煜全 | 易本胜 | 李德毅 | 游光荣 | 刘亚威 | 赵文银 全文收录:2016文章全收录 | 2015文章全收录 | 2014文章全收录 其他主题系列陆续整理中,敬请期待…… 返回搜狐,查看更多 |


【本文地址】