| 控制系统中"带宽"的理解 | 您所在的位置:网站首页 › 什么叫做系统的传递函数和传递函 › 控制系统中"带宽"的理解 |
控制系统中"带宽"的理解
|
本文来自对知乎文章如何入门自动控制的一些理解 首先来看几个概念: 带宽频率也称为闭环截止频率,是指当闭环幅频特性下降到频率为零时的分贝值以下3dB时,对应的频率,记作 w b w_b wb; 开环截止频率也称为剪切频率,是闭环系统的开环幅频特性中,幅频特性曲线穿越0dB线的频率,记为 w c w_c wc; 开环截止频率与闭环截止频率具有同向性:对一个闭环系统而言,其开环截止频率与闭环截止频率是两个完成不同的物理量,但它们之间又存在一定的相关性,即:开闭截止频率与其单位负反馈的闭环截止频率是同向增大的。且具有如下关系: w b ; w c w_b;w_c wb>wc。 下面首先通过一个例子来说明截止频率对系统性能的影响,最后再总结带宽对系统的影响: 以经典的弹簧阻尼系统为例,首先列写动力学方程: m d 2 x d t 2 = F ( t ) − b d x d t − k x m\frac{d^2x}{dt^2}=F(t)-b\frac{dx}{dt}-kx mdt2d2x=F(t)−bdtdx−kx 即:惯性力+阻尼力+弹性力=外界激励 其中 b = 2 b=\sqrt{2} b=2 为阻尼系数, k = 1 k=1 k=1为弹簧弹性系数,将上式写成微分方程的形式: X ( s ) F ( s ) = 1 s 2 + 2 s + 1 = w n 2 s 2 + 2 ζ w n s + w n 2 \frac{X(s)}{F(s)}=\frac{1}{s^2+\sqrt{2}s+1}=\frac{w_n^2}{s^2+2\zeta w_ns+w_n^2} F(s)X(s)=s2+2 s+11=s2+2ζwns+wn2wn2 现在假设用一个交变的正弦力
F
(
t
)
=
F
0
s
i
n
(
w
t
)
F(t)=F_0sin(wt)
F(t)=F0sin(wt)去激励这个弹簧振子,会出现什么响应呢呢?从之前的博客频域分析基础得到的结果:当给LTI系统一个正弦激励时,其响应也是一个正弦,而且频率不变。具体见下图:
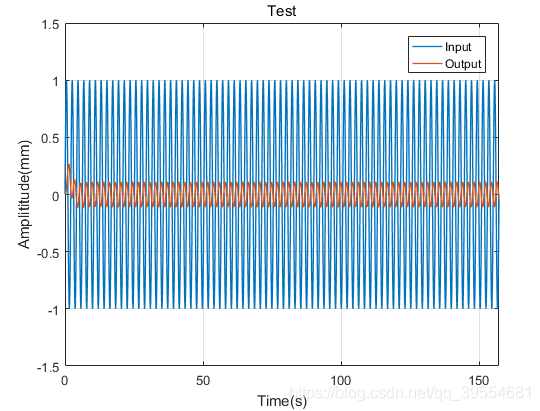
可见,对于一个一般的线性时不变系统(LTI),系统具有低通特性; 我们把对应幅值响应 20 l g ∣ A o u t / A i n ∣ = 20 l g ∣ 0.707 ∣ = − 3 d B 20lg|A_{out}/A_{in}|=20lg|0.707|=-3dB 20lg∣Aout/Ain∣=20lg∣0.707∣=−3dB时的频率称之为截止频率( w c = 1.27 r a d / s w_c=1.27rad/s wc=1.27rad/s),低于这个频率的系统能通过,高于这个频率的,系统会有较大幅度的过滤,幅值输出很小。特殊地,对于一个二阶系统,当阻尼比 ζ = 1 2 \zeta=\frac{1}{\sqrt{2}} ζ=2 1时,自然频率 w n w_n wn就代表了系统的截止频率。 举个例子:输入有两个正弦函数组成:
u
=
s
i
n
(
0.5
w
n
t
)
+
s
i
n
(
10
w
n
t
)
u=sin(0.5w_n t)+sin(10w_n t)
u=sin(0.5wnt)+sin(10wnt),一个分量为截止频率一半,另一个分量是截止频率的10倍,观察系统的输出: 由上图可以看出, 0.5 w c 0.5w_c 0.5wc频率的分量能较好的通过,而 10 w c 10w_c 10wc频率分量则基本被过滤掉了。这是两个频率分量的情况,那假如更复杂一些的输入呢?比如常见的阶跃信号: 首先我们对系统的阶跃响应做频谱分析得到其频谱分布: 如 w c = 3 r a d / s w_c=3rad/s wc=3rad/s
如
w
c
=
10
r
a
d
/
s
w_c=10rad/s
wc=10rad/s 可以看出,随着截止频率的增加,越来越多频率的分量能够通过系统,那输出也就更接近输入信号了。 控制系统中一般闭环系统居多,对闭环系统而言,其截止频率等于带宽;那么,从时域和频域的两个方面来看,系统的带宽(截止频率)越大,时域的响应速度也就越快,系统跟踪输入信号的能力就越强。当带宽无穷大时,系统可以完全复现输入信号,当然这是物理不可实现的。 |
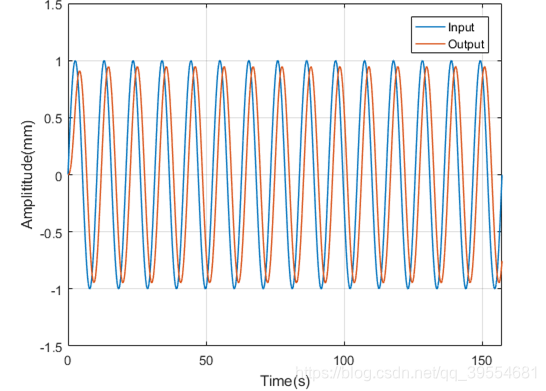 改变输入信号的频率,得到的输出信号也只有幅值和相位的变化,信号频率始终不变,如下如所示:
改变输入信号的频率,得到的输出信号也只有幅值和相位的变化,信号频率始终不变,如下如所示: 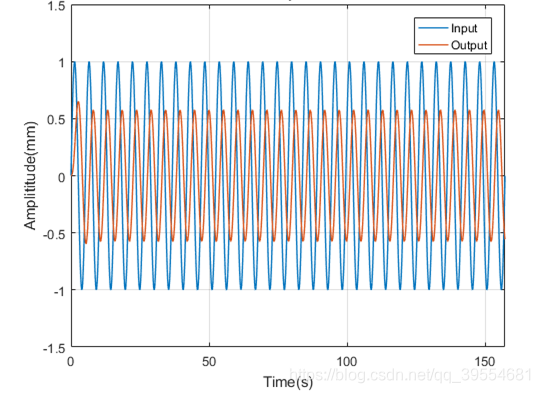
 我们画出系统的bode图如下:
我们画出系统的bode图如下: 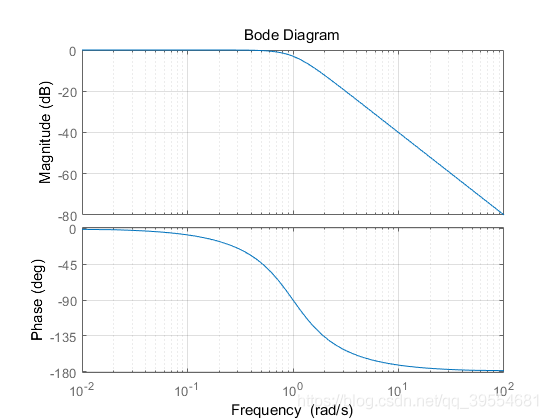 可以看到,当频率小于
1
r
a
d
/
s
1rad/s
1rad/s时,幅值响应增益基本为1,也就是幅值基本和输入一致,相位落后约
0
−
90
d
e
g
0~-90deg
0 −90deg。当频率大于
1
r
a
d
/
s
1rad/s
1rad/s时,幅值响应开始迅速衰减,当频率增加至
100
r
a
d
/
s
100rad/s
100rad/s时,幅值响应为
−
40
d
B
-40dB
−40dB,也就是输入幅值的1%,相位落后接近180°。
可以看到,当频率小于
1
r
a
d
/
s
1rad/s
1rad/s时,幅值响应增益基本为1,也就是幅值基本和输入一致,相位落后约
0
−
90
d
e
g
0~-90deg
0 −90deg。当频率大于
1
r
a
d
/
s
1rad/s
1rad/s时,幅值响应开始迅速衰减,当频率增加至
100
r
a
d
/
s
100rad/s
100rad/s时,幅值响应为
−
40
d
B
-40dB
−40dB,也就是输入幅值的1%,相位落后接近180°。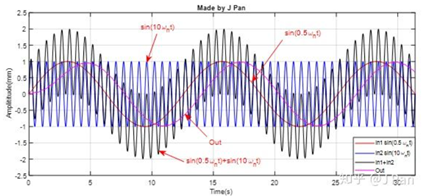
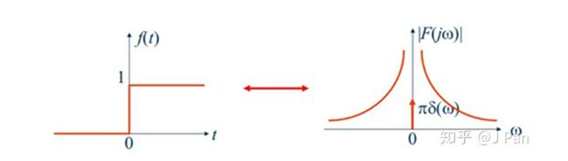 由图可知,阶跃函数在所有频率都有分量,而且随着频率的增加,其幅值越来越小,也就是低频下的分量贡献更多。假如现在输入是阶跃函数,那输出会是什么样? (注意:
f
(
t
)
f(t)
f(t)在
t
;
0
t;0
t>0时等同于直流信号,但它又不是纯粹的直流信号,它在
t
=
0
t=0
t=0处有跳变,因此其频谱不是仅在
t
=
0
t=0
t=0处有一个冲激函数(这对应于信号的直流特性),而且还会含有其它众多的频率分量。) 我们可以得到系统的阶跃响应如下图:
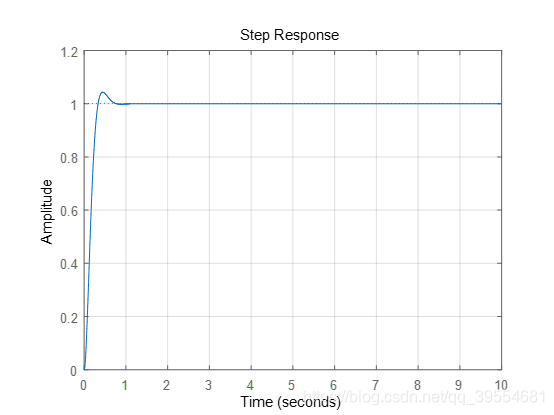
由图可知,阶跃函数在所有频率都有分量,而且随着频率的增加,其幅值越来越小,也就是低频下的分量贡献更多。假如现在输入是阶跃函数,那输出会是什么样? (注意:
f
(
t
)
f(t)
f(t)在
t
;
0
t;0
t>0时等同于直流信号,但它又不是纯粹的直流信号,它在
t
=
0
t=0
t=0处有跳变,因此其频谱不是仅在
t
=
0
t=0
t=0处有一个冲激函数(这对应于信号的直流特性),而且还会含有其它众多的频率分量。) 我们可以得到系统的阶跃响应如下图: 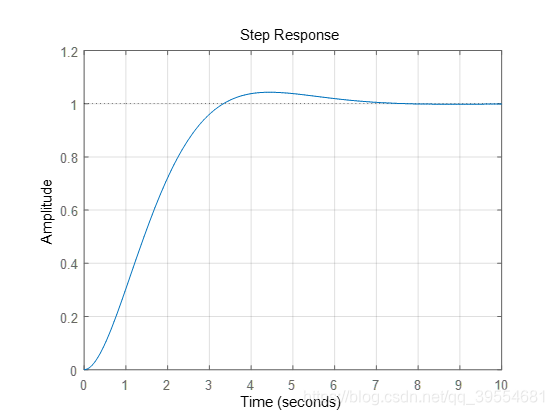 输出整体来说,基本呈“阶跃”样貌,但是在细节上又有不同。现在,假如改变系统的截止频率:
输出整体来说,基本呈“阶跃”样貌,但是在细节上又有不同。现在,假如改变系统的截止频率: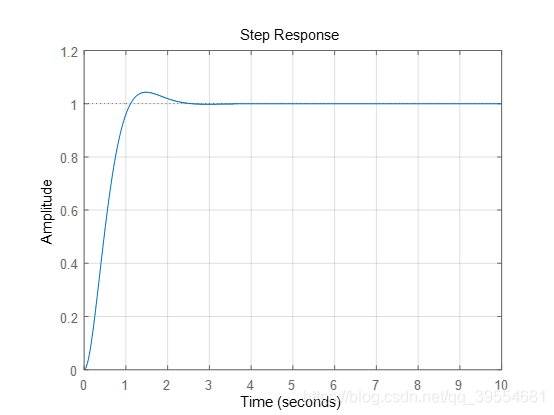
【本文地址】