| ADC单通道读取中断和DMA读取 | 您所在的位置:网站首页 › 中断与dma的区别 › ADC单通道读取中断和DMA读取 |
ADC单通道读取中断和DMA读取
|
中断读取
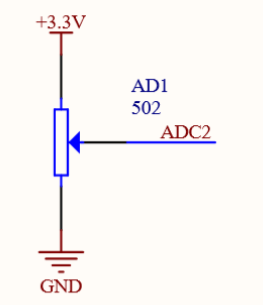
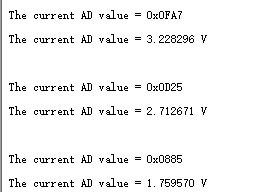
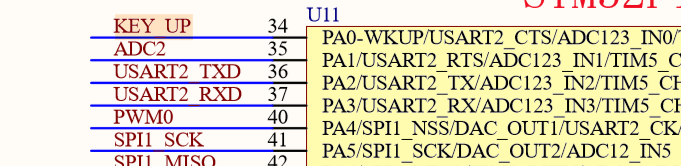
我们可以设置ADC数值转化转化完后触发一个中断,在中断服务函数去读取数据,以下是实验代码 bsp_adc.c 在stm32f10x_it.c里面定义ADC中断的服务函数 __IO uint16_t ADC_ConvertedValue; void ADC1_2_IRQHandler(void) { if (ADC_GetITStatus(ADC_X,ADC_IT_EOC)==SET) { // 读取ADC的转换值 ADC_ConvertedValue = ADC_GetConversionValue(ADC_X); } ADC_ClearITPendingBit(ADC_X,ADC_IT_EOC); }main.c #include "bsp_lcd.h" #include "bsp_usart.h" #include "bsp_systick.h" #include "hseconfig.h" #include "bsp_adc.h" extern __IO uint16_t ADC_ConvertedValue; // 局部变量,用于保存转换计算后的电压值 float ADC_ConvertedValueLocal; // 软件延时 void Delay(__IO uint32_t nCount) { for(; nCount != 0; nCount--); } int main(void) { //uint8_t i=0; HseConfig(9); //配置时钟为72Mhz //NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); USART1_Init(9600); //配置波特率为9600 printf("这是一个ADC实验\n"); ADC2_init(); //printf("这是一个DAC实验\n"); while (1) { ADC_ConvertedValueLocal =(float) ADC_ConvertedValue/4096*3.3; printf("\r\n The current AD value = 0x%04X \r\n", ADC_ConvertedValue); printf("\r\n The current AD value = %f V \r\n", ADC_ConvertedValueLocal); printf("\r\n\r\n"); Delay(0x0fee00); } }实验现象: 随着电位器的移动,电压值会随着变化 DMA读取相对于中断读取其中一个优点就是快,还有一个就是方便,不需要写中断服务函数,中断方式适用于速度慢,数据少的情况,DMA读取适用于速度快,数据多的情况,DMA还有一个优点就是不占用CPU,你可以边读取边处理数据, bsp_adc.c #include "bsp_adc.h" __IO uint16_t ADC_ConvertedValue; static void gpio_Init() { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_Instrust; GPIO_Instrust.GPIO_Mode = GPIO_Mode_AIN; GPIO_Instrust.GPIO_Pin = GPIO_PIN_1; GPIO_Instrust.GPIO_Speed=GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_Instrust); } static void adc_Init() { RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE); RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE);//使能DMA时钟 ADC_InitTypeDef ADC_Instruct; DMA_InitTypeDef DMA_Instruct;//初始化DMA结构体 DMA_DeInit(DMA1_Channel1);//复位DMA控制器 //配置DMA传输的外设基地址,为ADC数据寄存器地址 DMA_Instruct.DMA_PeripheralBaseAddr = (uint32_t)(& ( ADC_X ->DR )); // 存储器地址,实际上就是一个内部SRAM的变量 DMA_Instruct.DMA_MemoryBaseAddr = (uint32_t)&ADC_ConvertedValue; //数据源来自外设 DMA_Instruct.DMA_DIR = DMA_DIR_PeripheralSRC; // 缓冲区大小为1,缓冲区的大小应该等于存储器的大小 DMA_Instruct.DMA_BufferSize = 1; // 外设寄存器只有一个,地址不用递增 DMA_Instruct.DMA_PeripheralInc = DMA_PeripheralInc_Disable; // 存储器地址固定 DMA_Instruct.DMA_MemoryInc = DMA_MemoryInc_Disable; // 外设数据大小为半字,即两个字节,即ADC_X ->DR寄存器为16位 DMA_Instruct.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; // 存储器数据大小也为半字,跟外设数据大小相同, ADC_ConvertedValue为16位 DMA_Instruct.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord; // 循环传输模式 DMA_Instruct.DMA_Mode = DMA_Mode_Circular; // DMA 传输通道优先级为高,当使用一个DMA通道时,优先级设置不影响 DMA_Instruct.DMA_Priority = DMA_Priority_High; // 禁止存储器到存储器模式,因为是从外设到存储器 DMA_Instruct.DMA_M2M = DMA_M2M_Disable; // 初始化DMA,ADC1对应DMA通道1 DMA_Init(DMA1_Channel1, &DMA_Instruct); // 使能 DMA 通道 DMA_Cmd(DMA1_Channel1 , ENABLE); /*----------------------------------------------------*/ ADC_Instruct.ADC_ContinuousConvMode = ENABLE; ADC_Instruct.ADC_DataAlign = ADC_DataAlign_Right; ADC_Instruct.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; ADC_Instruct.ADC_Mode = ADC_Mode_Independent; ADC_Instruct.ADC_NbrOfChannel = ADC_Channel_1; ADC_Instruct.ADC_ScanConvMode = DISABLE; ADC_Init(ADC_X, &ADC_Instruct); RCC_ADCCLKConfig(RCC_PCLK2_Div8); ADC_RegularChannelConfig(ADC_X,ADC_Channel_1,1,ADC_SampleTime_55Cycles5 ); // 使能ADC DMA 请求 ADC_DMACmd(ADC_X, ENABLE); ADC_Cmd(ADC_X, ENABLE); // 初始化ADC 校准寄存器 ADC_ResetCalibration(ADC_X); // 等待校准寄存器初始化完成 while(ADC_GetResetCalibrationStatus(ADC_X)); // ADC开始校准 ADC_StartCalibration(ADC_X); // 等待校准完成 while(ADC_GetCalibrationStatus(ADC_X)); // 由于没有采用外部触发,所以使用软件触发ADC转换 ADC_SoftwareStartConvCmd(ADC_X, ENABLE); } void ADC2_init(void) { gpio_Init(); adc_Init(); //ADC_NVIC_Config(); }现象和中断模式的一致 ADC多通道DMA读取我们这里设置成6个通道采集ADC,单通道因为只有一个通道所以不用扫描模式,当我们设置成多通道的时候就需要不断扫描多个通道,所以我们这里我们用一个6位的数组来存放转化后的值(放在ADC数据寄存器 ),而且我们的DMA还要设置为存储器地址递增模式,也就是说数组的下标会自动加1来依次存放ADC采样后的值,我们采样GPIOA组的6个引脚来做ADC的采集 main.c #include "bsp_lcd.h" #include "bsp_usart.h" #include "bsp_systick.h" #include "hseconfig.h" #include "bsp_adc.h" extern __IO uint16_t ADC_ConvertedValue[6]; // 局部变量,用于保存转换计算后的电压值 float ADC_ConvertedValueLocal[6]; // 软件延时 void Delay(__IO uint32_t nCount) { for(; nCount != 0; nCount--); } int main(void) { //uint8_t i=0; HseConfig(9); //NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); USART1_Init(9600); printf("这是一个ADC实验\n"); ADC2_init(); //printf("这是一个DAC实验\n"); while (1) { ADC_ConvertedValueLocal[0] =(float) ADC_ConvertedValue[0]/4096*3.3; ADC_ConvertedValueLocal[1] =(float) ADC_ConvertedValue[1]/4096*3.3; ADC_ConvertedValueLocal[2] =(float) ADC_ConvertedValue[2]/4096*3.3; ADC_ConvertedValueLocal[3] =(float) ADC_ConvertedValue[3]/4096*3.3; ADC_ConvertedValueLocal[4] =(float) ADC_ConvertedValue[4]/4096*3.3; ADC_ConvertedValueLocal[5] =(float) ADC_ConvertedValue[5]/4096*3.3; printf("\r\n CH0 value = %f V \r\n",ADC_ConvertedValueLocal[0]); printf("\r\n CH1 value = %f V \r\n",ADC_ConvertedValueLocal[1]); printf("\r\n CH2 value = %f V \r\n",ADC_ConvertedValueLocal[2]); printf("\r\n CH3 value = %f V \r\n",ADC_ConvertedValueLocal[3]); printf("\r\n CH4 value = %f V \r\n",ADC_ConvertedValueLocal[4]); printf("\r\n CH5 value = %f V \r\n",ADC_ConvertedValueLocal[5]); printf("\r\n\r\n"); Delay(0x0fffee); } } 双ADC读取-规则同步我们这里采样双ADC读出模拟量,规则同步指的是ADC1采集后ADC2也采集,ADC1转化完成后ADC2也转化完成,之前的做法都是使用一个ADC转化,所以ADC_DR寄存器只使用了低16位,现在是双ADC转化所以ADC_DR寄存器的高,低16位都被使用,ADC1数据放在低16位,ADC2数据放在高16位 bsp_adc.c #include "bsp_adc.h" __IO uint32_t ADC_ConvertedValue[2] ={0}; static void gpio_Init() { /*ADC1 PA0初始化*/ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_Instrust; GPIO_Instrust.GPIO_Mode = GPIO_Mode_AIN; GPIO_Instrust.GPIO_Pin = GPIO_Pin_0; GPIO_Init(GPIOA, &GPIO_Instrust); /*ADC2 PA1初始化*/ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitTypeDef GPIO_Instrust1; GPIO_Instrust1.GPIO_Mode = GPIO_Mode_AIN; GPIO_Instrust1.GPIO_Pin = GPIO_Pin_1; GPIO_Init(GPIOA, &GPIO_Instrust1); } static void adc_Init() { RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC2,ENABLE); RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE);//使能DMA时钟 /*-----------------------DMA配置----------------------------------*/ DMA_InitTypeDef DMA_Instruct;//初始化DMA结构体 DMA_DeInit(DMA1_Channel1);//复位DMA控制器 //配置DMA传输的外设基地址,为ADC数据寄存器地址 DMA_Instruct.DMA_PeripheralBaseAddr = (uint32_t)(& ( ADC_X ->DR )); // 存储器地址,实际上就是一个内部SRAM的变量 DMA_Instruct.DMA_MemoryBaseAddr = (uint32_t)ADC_ConvertedValue; //数据源来自外设 DMA_Instruct.DMA_DIR = DMA_DIR_PeripheralSRC; // 缓冲区大小为1,缓冲区的大小应该等于存储器的大小 DMA_Instruct.DMA_BufferSize = 1; // 外设寄存器只有一个,地址不用递增 DMA_Instruct.DMA_PeripheralInc = DMA_PeripheralInc_Disable; // 存储器地址递增 DMA_Instruct.DMA_MemoryInc = DMA_MemoryInc_Enable; // 外设数据大小为半字,即两个字节,即ADC_X ->DR寄存器为32位 DMA_Instruct.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Word; // 存储器数据大小也为半字,跟外设数据大小相同, ADC_ConvertedValue为32位 DMA_Instruct.DMA_MemoryDataSize = DMA_MemoryDataSize_Word; // 循环传输模式 DMA_Instruct.DMA_Mode = DMA_Mode_Circular; // DMA 传输通道优先级为高,当使用一个DMA通道时,优先级设置不影响 DMA_Instruct.DMA_Priority = DMA_Priority_High; // 禁止存储器到存储器模式,因为是从外设到存储器 DMA_Instruct.DMA_M2M = DMA_M2M_Disable; // 初始化DMA,ADC1对应DMA通道1 DMA_Init(DMA1_Channel1, &DMA_Instruct); // 使能 DMA 通道 DMA_Cmd(DMA1_Channel1 , ENABLE); /*------------------------配置ADC1-----------------------*/ ADC_InitTypeDef ADC_Instruct; ADC_Instruct.ADC_ContinuousConvMode = ENABLE; ADC_Instruct.ADC_DataAlign = ADC_DataAlign_Right; ADC_Instruct.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; ADC_Instruct.ADC_Mode = ADC_Mode_RegSimult; ADC_Instruct.ADC_NbrOfChannel = 1; ADC_Instruct.ADC_ScanConvMode = ENABLE; ADC_Init(ADC1, &ADC_Instruct); RCC_ADCCLKConfig(RCC_PCLK2_Div8); ADC_RegularChannelConfig(ADC1,ADC_Channel_1,1,ADC_SampleTime_239Cycles5 ); // 使能ADC DMA 请求 ADC_DMACmd(ADC1, ENABLE); /*------------------------配置ADC2-----------------------*/ ADC_InitTypeDef ADC_Instruct1; ADC_Instruct1.ADC_ContinuousConvMode = ENABLE; ADC_Instruct1.ADC_DataAlign = ADC_DataAlign_Right; ADC_Instruct1.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; ADC_Instruct1.ADC_Mode = ADC_Mode_RegSimult; ADC_Instruct1.ADC_NbrOfChannel = 1; ADC_Instruct1.ADC_ScanConvMode = ENABLE; ADC_Init(ADC2, &ADC_Instruct1); RCC_ADCCLKConfig(RCC_PCLK2_Div8); ADC_RegularChannelConfig(ADC2,ADC_Channel_0,1,ADC_SampleTime_239Cycles5 ); /* 使能ADCx_2的外部触发转换 */ ADC_ExternalTrigConvCmd(ADC2, ENABLE); /*----------------------ADC1校准--------------------------*/ //开启ADC,并开始转换 ADC_Cmd(ADC1, ENABLE); // 初始化ADC 校准寄存器 ADC_ResetCalibration(ADC1); // 等待校准寄存器初始化完成 while(ADC_GetResetCalibrationStatus(ADC1)); // ADC开始校准 ADC_StartCalibration(ADC1); // 等待校准完成 while(ADC_GetCalibrationStatus(ADC1)); /*----------------------ADC2校准--------------------------*/ //开启ADC,并开始转换 ADC_Cmd(ADC2, ENABLE); // 初始化ADC 校准寄存器 ADC_ResetCalibration(ADC2); // 等待校准寄存器初始化完成 while(ADC_GetResetCalibrationStatus(ADC2)); // ADC开始校准 ADC_StartCalibration(ADC2); // 等待校准完成 while(ADC_GetCalibrationStatus(ADC2)); // 由于没有采用外部触发,所以使用软件触发ADC转换 ADC_SoftwareStartConvCmd(ADC1, ENABLE); } /*static void ADC_NVIC_Config(void) { NVIC_InitTypeDef NVIC_InitStructure; // 优先级分组 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); // 配置中断优先级 NVIC_InitStructure.NVIC_IRQChannel = ADC1_2_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); }*/ void ADC2_init(void) { gpio_Init(); adc_Init(); //ADC_NVIC_Config(); }main.c #include "bsp_lcd.h" #include "bsp_usart.h" #include "bsp_systick.h" #include "hseconfig.h" #include "bsp_adc.h" extern __IO uint32_t ADC_ConvertedValue[1]; // 局部变量,用于保存转换计算后的电压值 float ADC_ConvertedValueLocal[2]; // 软件延时 void Delay(__IO uint32_t nCount) { for(; nCount != 0; nCount--); } int main(void) { //uint8_t i=0; uint16_t temp0=0 ,temp1=0; HseConfig(9); //NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); USART1_Init(9600); printf("这是一个ADC实验\n"); ADC2_init(); //printf("这是一个DAC实验\n"); while (1) { // 取出ADC1数据寄存器的高16位,这个是ADC2的转换数据 temp0 = (ADC_ConvertedValue[0]&0XFFFF0000) >> 16; // 取出ADC1数据寄存器的低16位,这个是ADC1的转换数据 temp1 = (ADC_ConvertedValue[0]&0XFFFF); ADC_ConvertedValueLocal[0] =(float) temp0/4096*3.3; ADC_ConvertedValueLocal[1] =(float) temp1/4096*3.3; printf("\r\n ADCx_1 value = %f V \r\n", ADC_ConvertedValueLocal[1]); printf("\r\n ADCx_2 value = %f V \r\n", ADC_ConvertedValueLocal[0]); printf("\r\n\r\n"); Delay(0x0fffee); } } |

 bsp_adc.c
bsp_adc.c【本文地址】
公司简介
联系我们