| 四线/六线步进电机原理 | 您所在的位置:网站首页 › 两厢电机接线 › 四线/六线步进电机原理 |
四线/六线步进电机原理
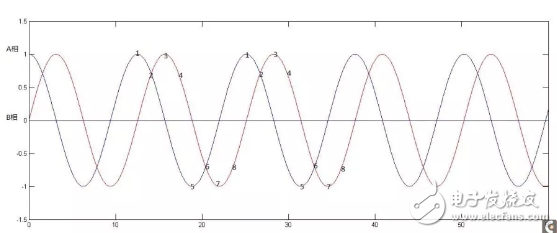
图中蓝色线时A相电流,红色线是B相电流。如果把A相正负极值视为A+A-,B相正负极值视为B+B-,比较一下四拍方式正转A+B+A-B-和反转A+B-A-B+不难看出四排方式实际上是用一个脉冲来代替一个正弦半周期,相位点从左到右变化则电机正转,从右到左电机反转。类似的我们把八拍方式A+;A+B+;B+;B+A-;A-;A-B-;B-;B-A+;放到曲线里也可以找到对应点,图中标出了各拍的相位点1,2,3…,不难看出用A+B+代替第2拍点用B+A-代替第四拍点都是近似的做法。那么这种近似和理想情况的电流的差值去哪里了呢?这些电流被无谓的消耗掉了而且多余的电流会引起电机转动的不平稳。为什么要细分呢?实际细分的终极目标就是在正弦的周期中插入若干个点使得相电流接近正弦变化,细分可以提高定位精度和电机运转的平稳性。
由此我们抛开细分不谈,如果你能调制出两条相差为90度的正弦波形就是理想的步进电机驱动器了,调制出的正弦波形的频率就是步进电机的转速,正弦的幅值就是步进电机的转矩。这个听起来貌似不难啊,但是你不要忘了调制出的正弦是有要求的。 第一要有一定的驱动能力步进电机的功率越大驱动能力要求也越大。 第二要能够保持90度的相差前提下改变正弦的频率,这样才能够驱动电机按不同的转速运转,步进电机的旋转方向实际上是两条正弦波的相位点顺序。 第三最好能够调幅,调整幅值能够实现电机的恒力矩输出,调幅的实际意义还不止这些后面再讲。 总之一句话就是通过pwm调制输出可以调频调幅的两路固定相差的正弦波。(如果是三相步进电机应该是相差各位120度的三路正弦波,原理是一样的。)
上面那个图和两相步进电机驱动的关系可能有些疑惑"真的是这样的吗?",我们在这里再安排一个试验。我们知道电动机和发电机是两个可逆的过程,因此我们可以用步进电机来当发电机。很简单的实验,我们把步进电机的两相引线接到双踪示波器输入上,然后找个电机带着转轴运转(我是用一个手电钻夹住电机的转轴,我的这个手钻是可以正反转的)。保持稳定的转速,你会在示波器上看到上面那个图:即两路相差固定的完美的正弦波,当转速增大时幅值和频率都有变化(线性关系),并且正转和反转时两路正弦相位位置不同,如果你能够确定转速的话你还可以验证以下周期、转速、步距角之间的关系。 步进电机的驱动要比逆变器、伺服电机驱动复杂的地方在于需要大范围的变频,如果能做好这个步进电机的驱动器其它那两个就不成问题了,至少在波形调制上绝对没问题了,它们的基本原理是通的。 基于STM32的SPWM控制步进电机教程 来自于:https://bbs.elecfans.com/jishu_1542144_1_1.html
|
【本文地址】
公司简介
联系我们