| 计算机图形学14:三维图形的投影变换 | 您所在的位置:网站首页 › 三视图变轴测图 › 计算机图形学14:三维图形的投影变换 |
计算机图形学14:三维图形的投影变换
|
作者:非妃是公主 专栏:《计算机图形学》 博客地址:https://blog.csdn.net/myf_666 个性签:顺境不惰,逆境不馁,以心制境,万事可成。——曾国藩 计算机图形学(英语:computer graphics,缩写为CG)是研究计算机在硬件和软件的帮助下创建计算机图形的科学学科,是计算机科学的一个分支领域,主要关注数字合成与操作视觉的图形内容。虽然这个词通常被认为是指三维图形,事实上同时包括了二维图形以及影像处理。 一、三维图形的投影变换三维图形的投影变换可分为两类:平行投影和透视投影。
平行投影可分为两类:正投影和斜投影。
其中正投影中又可以分为:三视图和正轴测图。 Ⅰ. 三视图 ① 主视图
主视图是逆着y轴方向去看,所以y轴的坐标为0,进而变化矩阵如下: T z o x = [ 1 0 0 0 0 0 0 0 0 0 1 0 0 0 0 1 ] T_{zox}=\begin{bmatrix} 1&0&0&0\\ 0&0&0&0\\ 0&0&1&0\\ 0&0&0&1\\ \end{bmatrix}\ Tzox= 1000000000100001 由于主视图已经落在了xoz平面上,所以不需要其它操作。 代码实现如下: /// /// 将点转化为其次坐标 /// /// 点 /// 齐次坐标 Matrix vertex3D2qici(VERTEX3D vertex3D) { Matrix qiciVertex(4, 1); qiciVertex.matrix[0][0] = vertex3D.x; qiciVertex.matrix[1][0] = vertex3D.y; qiciVertex.matrix[2][0] = vertex3D.z; qiciVertex.matrix[3][0] = 1; return qiciVertex; } VERTEX3D qici2vertex3D(Matrix qici) { VERTEX3D res; res.x = qici.matrix[0][0]; res.y = qici.matrix[1][0]; res.z = qici.matrix[2][0]; return res; } VERTEX3D mainViewTransform3D(VERTEX3D vertex3D) { Matrix qiciVertex = vertex3D2qici(vertex3D); Matrix transform; // 去掉y坐标变换矩阵 transform.matrix[0][0] = 1; transform.matrix[1][1] = 0; transform.matrix[2][2] = 1; transform.matrix[3][3] = 1; Matrix qicires = dotMatrix(transform, qiciVertex); VERTEX3D res = qici2vertex3D(qicires); return res; } ② 俯视图俯视图逆着z轴的方向来看,因此需要将z轴上的坐标置为0,第一步变换矩阵如下: T x o y = [ 1 0 0 0 0 1 0 0 0 0 0 0 0 0 0 1 ] T_{xoy}=\begin{bmatrix} 1&0&0&0\\ 0&1&0&0\\ 0&0&0&0\\ 0&0&0&1\\ \end{bmatrix}\ Txoy= 1000010000000001 同时由于最终要是的三个视图落在一个平面内(xoz平面),因此还需要对视图进行旋转,使得俯视图绕着x轴旋转-90度,第二度变换矩阵如下: T R x = [ 1 0 0 0 0 c o s θ − s i n θ 0 0 s i n θ c o s θ 0 0 0 0 1 ] = [ 1 0 0 0 0 0 1 0 0 − 1 0 0 0 0 0 1 ] T_{Rx}=\begin{bmatrix} 1&0&0&0\\ 0&cos\theta&-sin\theta&0\\ 0&sin\theta&cos\theta&0\\ 0&0&0&1\\ \end{bmatrix}=\begin{bmatrix} 1&0&0&0\\ 0&0&1&0\\ 0&-1&0&0\\ 0&0&0&1\\ \end{bmatrix} TRx= 10000cosθsinθ00−sinθcosθ00001 = 100000−1001000001 此处 θ = − 9 0 ∘ \theta=-90^{\circ} θ=−90∘ 最后还要将主视图和俯视图分开,保持一定间距,还要让俯视图向下平移一个单位向量 − z 0 -z_0 −z0。 T T z = [ 1 0 0 0 0 1 0 0 0 0 1 − z 0 0 0 0 1 ] T_{Tz}=\begin{bmatrix} 1&0&0&0\\ 0&1&0&0\\ 0&0&1&-z_0\\ 0&0&0&1\\ \end{bmatrix} TTz= 10000100001000−z01 所以总变换矩阵如下: p ′ = T T z ⋅ T R x ⋅ T x o y ⋅ p p'=T_{Tz}\cdot T_{Rx}\cdot T_{xoy}\cdot p p′=TTz⋅TRx⋅Txoy⋅p VERTEX3D topViewTransform3D(VERTEX3D vertex3D) { Matrix qiciVertex = vertex3D2qici(vertex3D); Matrix transform1; // 去掉z坐标变换矩阵 transform1.matrix[0][0] = 1; transform1.matrix[1][1] = 1; transform1.matrix[2][2] = 0; transform1.matrix[3][3] = 1; Matrix qicitmp = dotMatrix(transform1, qiciVertex); // 去掉z坐标 VERTEX3D tmp = qici2vertex3D(qicitmp); tmp = rotationForXTransform3D(tmp, -90); // 沿x轴旋转90度 tmp = transTransform3D(tmp, 0, 0, -100); // 向下平移-1个单位 return tmp; } ③ 侧视图侧视图为逆着x轴看,所以要将x方向的坐标置为0: T y o z = [ 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 ] T_{yoz}=\begin{bmatrix} 0&0&0&0\\ 0&1&0&0\\ 0&0&1&0\\ 0&0&0&1\\ \end{bmatrix} Tyoz= 0000010000100001 同理,为了与主视图画在一个平面内,使侧视面绕z轴旋转 9 0 ∘ 90^{\circ} 90∘,如下: T R x = [ c o s θ − s i n θ 0 0 s i n θ c o s θ 0 0 0 0 1 0 0 0 0 1 ] = [ 0 − 1 0 0 1 0 0 0 0 0 1 0 0 0 0 1 ] T_{Rx}=\begin{bmatrix} cos\theta&-sin\theta&0&0\\ sin\theta&cos\theta&0&0\\ 0&0&1&0\\ 0&0&0&1\\ \end{bmatrix}=\begin{bmatrix} 0&-1&0&0\\ 1&0&0&0\\ 0&0&1&0\\ 0&0&0&1\\ \end{bmatrix} TRx= cosθsinθ00−sinθcosθ0000100001 = 0100−100000100001 然后与主视图有一定间距,向x轴负方向平移 − x 0 -x_0 −x0,如下: T T x = [ 1 0 0 − x 0 0 1 0 0 0 0 1 0 0 0 0 1 ] T_{Tx}=\begin{bmatrix} 1&0&0&-x_0\\ 0&1&0&0\\ 0&0&1&0\\ 0&0&0&1\\ \end{bmatrix} TTx= 100001000010−x0001 所以总变换矩阵如下: p ′ = T T x ⋅ T R z ⋅ T y o z ⋅ p p'=T_{Tx}\cdot T_{Rz}\cdot T_{yoz}\cdot p p′=TTx⋅TRz⋅Tyoz⋅p 实现代码如下: VERTEX3D sideViewTransform3D(VERTEX3D vertex3D) { Matrix qiciVertex = vertex3D2qici(vertex3D); Matrix transform1; // 去掉x坐标变换矩阵 transform1.matrix[0][0] = 0; transform1.matrix[1][1] = 1; transform1.matrix[2][2] = 1; transform1.matrix[3][3] = 1; Matrix qicitmp = dotMatrix(transform1, qiciVertex); // 去掉x坐标 VERTEX3D tmp = qici2vertex3D(qicitmp); tmp = rotationForZTransform3D(tmp, 90); // 沿x轴旋转90度 tmp = transTransform3D(tmp, -100, 0, 0); // 向x负方向平移-1个单位 return tmp; } ④ 三视图效果展示
测试效果代码: void testThreeView() { VERTEX3D vertex3D_1 = { 100,100,100 }; VERTEX3D vertex3D_2 = { 0,100,0 }; VERTEX3D vertex3D_3 = { 200,100,0 }; VERTEX3D vertex3D_4 = { 200,0,0 }; // 主视图 VERTEX3D res1 = mainViewTransform3D(vertex3D_1); VERTEX3D res2 = mainViewTransform3D(vertex3D_2); VERTEX3D res3 = mainViewTransform3D(vertex3D_3); VERTEX3D res4 = mainViewTransform3D(vertex3D_4); glBegin(GL_LINES); glVertex2f(-res1.x, res1.z); glVertex2f(-res2.x, res2.z); glVertex2f(-res1.x, res1.z); glVertex2f(-res3.x, res3.z); glVertex2f(-res1.x, res1.z); glVertex2f(-res4.x, res4.z); glVertex2f(-res2.x, res2.z); glVertex2f(-res3.x, res3.z); glVertex2f(-res2.x, res2.z); glVertex2f(-res4.x, res4.z); glVertex2f(-res3.x, res3.z); glVertex2f(-res4.x, res4.z); glEnd(); // 上视图 res1 = topViewTransform3D(vertex3D_1); res2 = topViewTransform3D(vertex3D_2); res3 = topViewTransform3D(vertex3D_3); res4 = topViewTransform3D(vertex3D_4); glBegin(GL_LINES); glVertex2f(-res1.x, res1.z); glVertex2f(-res2.x, res2.z); glVertex2f(-res1.x, res1.z); glVertex2f(-res3.x, res3.z); glVertex2f(-res1.x, res1.z); glVertex2f(-res4.x, res4.z); glVertex2f(-res2.x, res2.z); glVertex2f(-res3.x, res3.z); glVertex2f(-res2.x, res2.z); glVertex2f(-res4.x, res4.z); glVertex2f(-res3.x, res3.z); glVertex2f(-res4.x, res4.z); glEnd(); // 侧视图 res1 = sideViewTransform3D(vertex3D_1); res2 = sideViewTransform3D(vertex3D_2); res3 = sideViewTransform3D(vertex3D_3); res4 = sideViewTransform3D(vertex3D_4); glBegin(GL_LINES); glVertex2f(-res1.x, res1.z); glVertex2f(-res2.x, res2.z); glVertex2f(-res1.x, res1.z); glVertex2f(-res3.x, res3.z); glVertex2f(-res1.x, res1.z); glVertex2f(-res4.x, res4.z); glVertex2f(-res2.x, res2.z); glVertex2f(-res3.x, res3.z); glVertex2f(-res2.x, res2.z); glVertex2f(-res4.x, res4.z); glVertex2f(-res3.x, res3.z); glVertex2f(-res4.x, res4.z); glEnd(); cout glClearColor(1.0f, 1.0f, 1.0f, 1.0f); //设置窗口背景颜色为白色 glMatrixMode(GL_PROJECTION); //设置投影参数 gluOrtho2D(-400.0, 400.0, -300, 300.0); // 投影面上的模型坐标范围 } int main(int argc, char* argv[]) { //testTransTransform(); //testScaleTransform3D(); //testSymmetryForXTransform3D(); //testSymmetryForYTransform3D(); //testSymmetryForZTransform3D(); //testSymmetryForXOYTransform3D(); //testSymmetryForYOZTransform3D(); //testSymmetryForZOXTransform3D(); //testMiscutTransform3D(); //testRotationForXTransform3D(); //testRotationForYTransform3D(); //testRotationForZTransform3D(); //testThreeView(); glutInit(&argc, argv); // glut初始化 glutInitDisplayMode(GLUT_SINGLE | GLUT_RGB);//初始窗口显示模式 glutInitWindowSize(800, 600); //设置窗口的尺寸 glutInitWindowPosition(200, 200); //设置窗口的位置 glutCreateWindow("基本图形生成"); //创建一个窗口 glutDisplayFunc(Display); //设置当前窗口的显示回调函数 Initial(); //完成窗口初始化 glutMainLoop(); //启动主GLUT事件处理循环 return 0; }其中旋转函数的定义,见专栏中文章(计算机图形学:三维图形的几何变换),其中有关于用到的几何变换函数的详细定义。 Ⅱ. 正轴测图
三视图与正轴测都属于正投影,但各有优缺点,如下:
按照投影面与三个坐标轴之间的夹角,可以分为等轴测、正二侧、正三侧。
正轴测的变换矩阵与公式推导:
斜轴测图:将三维物体向一个单一的投影面做平行投影,但投影方向不垂直于投影面所得的平面图形。常用的斜轴侧图有斜等侧图和斜二侧图。 后面用到了补充…… Ⅱ. 斜二侧图后面用到了补充…… 三、透视投影
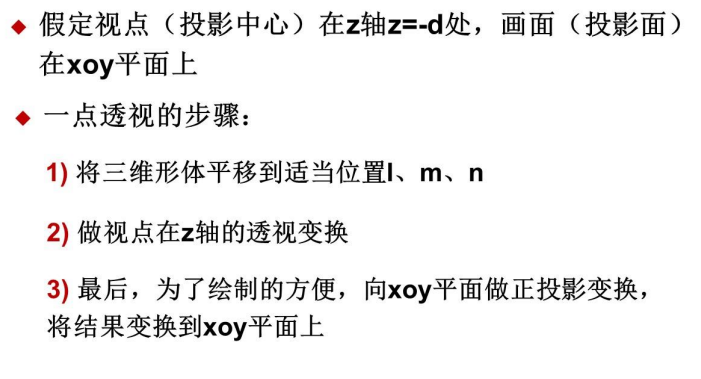
两点透视和三点透视较为复杂,在此不再展开介绍。 四、三维观察基本流程
三维图形的几何变换到这里就要结束啦~~到此既是缘分,欢迎您的点赞、评论、收藏!关注我,不迷路,我们下期再见!! 😘😘😘 我是Cherries,一位计算机科班在校大学生,写博客用来记录自己平时的所思所想! 💞💞💞 内容繁杂,又才疏学浅,难免存在错误,欢迎各位大佬的批评指正! 👋👋👋 我们相互交流,共同进步! 注:本文由非妃是公主发布于https://blog.csdn.net/myf_666,转载请务必标明原文链接:https://blog.csdn.net/myf_666/article/details/129877371 |



























 这里还有些不懂,懂了的时候再来补充 hahaha~ ヾ(≧▽≦*)o
这里还有些不懂,懂了的时候再来补充 hahaha~ ヾ(≧▽≦*)o【本文地址】