| 基于激光扫描技术的三维场景快速重构 | 您所在的位置:网站首页 › 三维激光扫描仪如何处理数据 › 基于激光扫描技术的三维场景快速重构 |
基于激光扫描技术的三维场景快速重构
|
2、工程数据采集
在开展扫描工作之前,首先应对扫描路线有合理的规划,将扫描区域整体把握,根据其平面图分成多个扫描区域,规划扫描区域要充分考虑到扫描合理性安排,即扫描区域的重叠度、单次扫描工作面积以及对于建筑物本身的建筑特点分析等,避免遗漏。
在开展扫描工作时,为了确保获取数据的精度,应当建立数据集闭合环,该闭合环可以解释为在进行大区域扫描时,在一次扫描过程中要多次经过同一位置形成闭合环路。扫描工作开展时,确保与之前走过的路线产生交叉点,并捕捉到已知环境,通过传感器获取重要的几何图形,通过触摸屏控制器展示扫描路径,前进速度慢于正常走路速度,每隔2m进行一次拍照,待机器拍摄完成后继续前进,交叉点有效地提高了测图精度。
扫描仪获取到得点云和高清影像数据生成建筑物三维实景,需要通过配备的数据处理软件进行处理。其主要过程包括原始数据、发布数据以及网络数据的数据预处理,对点云进行数据配准,通过系统进行地图创建,为室内路径导航做好铺垫,最后将地图发布。 3.1 数据预处理 数据预处理主要分为原始数据、发布数据以及网络数据预处理三个方面,其处理过程较为复杂,需要时间较长,大约是数据采集时间的3倍左右。处理过程实际上是将获取的扫描数据上传到Navvis Sitemaker软件中进行处理转换点云模型,待数据处理完成,生成链接创建实例,再进一步通过网页交互进行数据处理,数据预处理主要是对采集过程中移动的物体及人进行数据删除。发布数据预处理和网络数据预处理是基于实测数据建立的网络实例,并通过IndoorViewer进行展示。
3.2 点云配准 在编辑模式中得数据集校准进行点云配准工作,将点云数据进行匹配与关联,使多部分点云数据集形成统一整体,将不同区域获取的点云数据关联,形成通道与通道、楼层与楼层、室内实景与实际地理位置正确的联接关系。 配准模式中通过控制平移与旋转进行视图影像的精确点云配准,将不同区域进行颜色区分,方便不同区域的识别,认真核实不同区域的重叠度,完成整个区域的点云相对配准工作。接下来,在不同区域相对配准完成的基础上,进行全球配准,将数据集展示在全球统一的坐标系中,通过OSM (open street map)进行地理配准,借助卫星遥感影像辅助定位,将数据集直接安置在准确的位置即可。
3.3 创建导航图与云地图 导航图是显示可能达到目的点的路线,为导航路径规划提供参考;云地图是目标区域的二维平面图。导航图与云地图的创建是通过点云数据与配准数据创建的,是数据处理过程中必要的步骤。
将创建好的导航图与云地图上传到网络服务器中来展示室内三维实景地图成果,可以点击地面点动态浏览建筑物内部实景,也可增加POI(Point of Interest),并录入POI属性,并且可以通过测量模式中直接测量距离与物体的体积等。 图8 成果展示 5、总 结随着测绘地理信息技术和无线通信技术的高速发展,基于三维激光扫描技术获取点云数据精度高、效率快的特点,对于细节测量要求高的室内三维场景重构是十分契合的,该技术能够达到对室内各精细构件建模的要求,即能准确表达室内物体存放的位置和存在的状态,但是在室内,由于空间较为复杂,并且定位信号不稳定,想要获得精准定位需要架设多个基站满足定位需求,NavVis室内空间数字化及定位导航系统提供了室内定位的解决方案,室内空间数字化及定位导航系统以扫描仪作为搭载平台,改变依赖GPS和惯导系统进行定位,集SLAM、激光扫描仪以及高分辨率相机为一体,实现室内三维实景拍摄与建模工作,相比于传统的激光扫描仪,其采集效率更快,精度更高,形成从采集、数据处理、数据发布完整的解决方案,对于室内高精度的地图数据采集具有广阔的推广空间。 本文所有文字版权均属“宝略科技”,更多内容请搜索关注【宝略科技】微信公众号~返回搜狐,查看更多 |
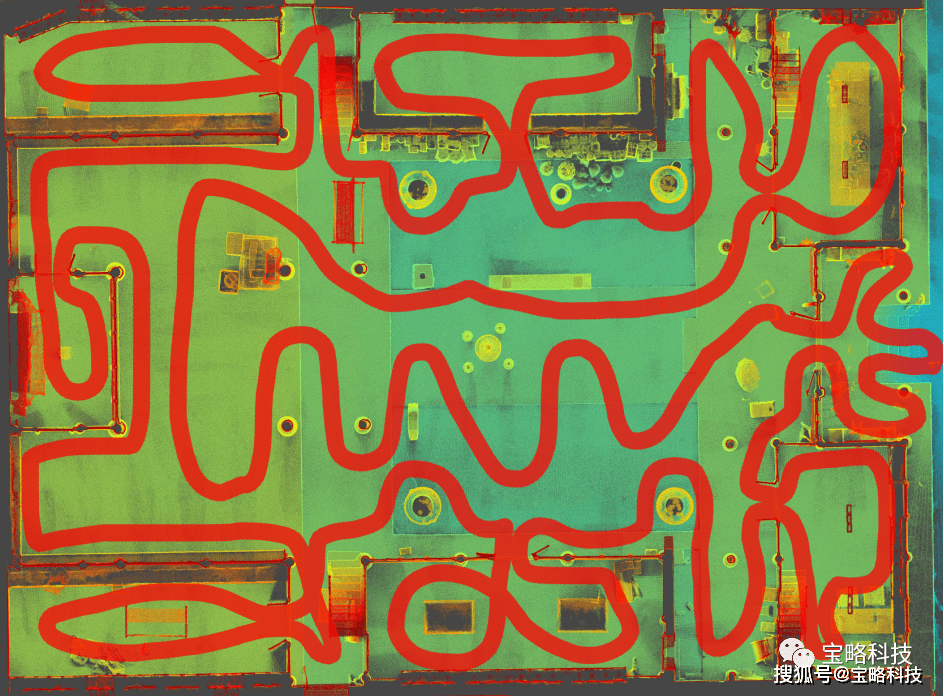 图3 扫描路径
图3 扫描路径 图4 实时显示扫描路径及扫描完整情况
图4 实时显示扫描路径及扫描完整情况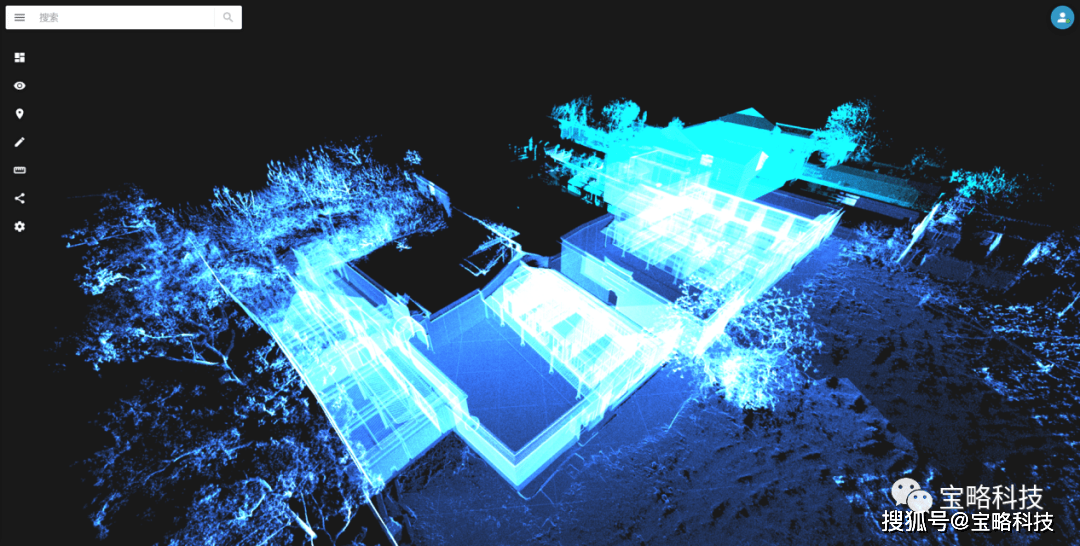 图5 数据展示
图5 数据展示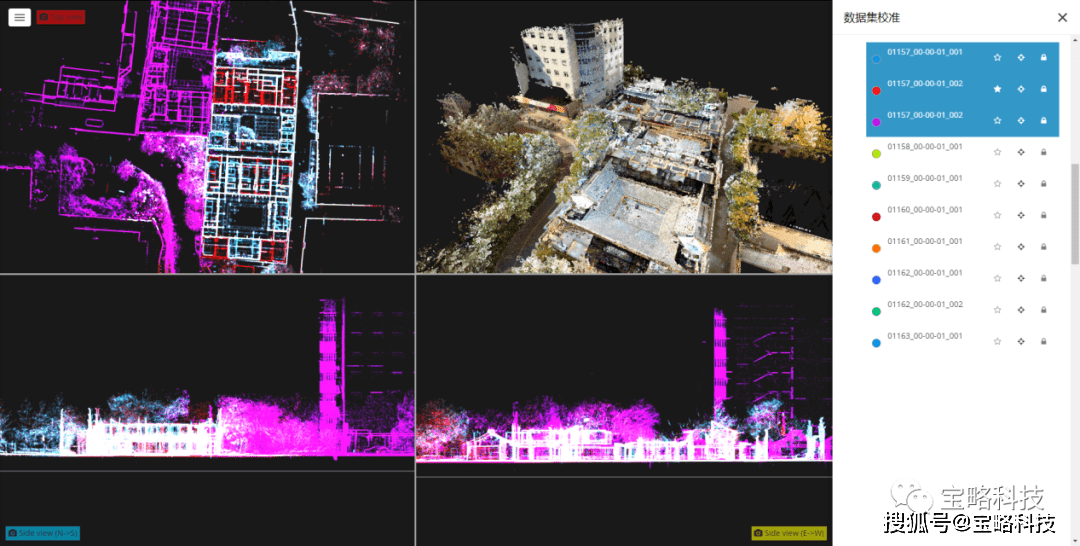 图6 配准界面
图6 配准界面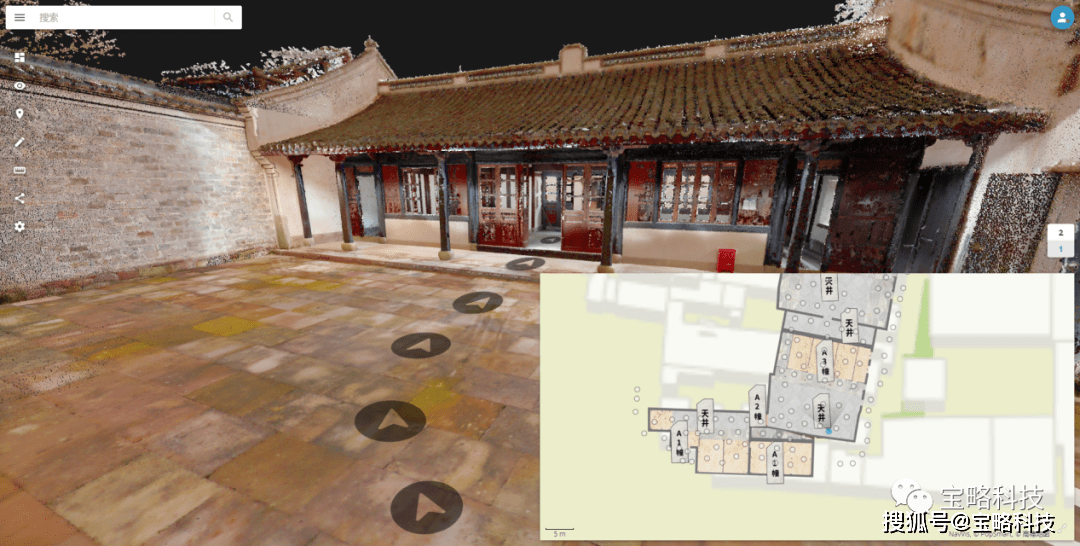 图7 导航图与云地图
图7 导航图与云地图【本文地址】