| 机原自检 | 您所在的位置:网站首页 › 三级杆组有几个个构件 › 机原自检 |
机原自检
|
1.什么是构件?什么是运动副?运动副有哪些常用的分类?
2.机构具有确定运动的条件?最小阻力定律?
3.平面自由度的计算公式
4.计算运动副时要注意的问题(复合铰链、重合问题等)
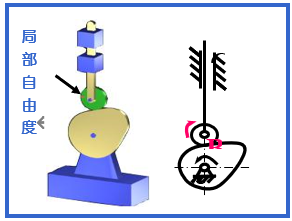
5.什么是局部自由度,有什么作用?什么是虚约束,有什么作用?计算自由度时如何处理?
6.什么是基本杆组?平面机构的组成原理是啥?
1.什么是构件?什么是运动副?运动副有哪些常用的分类? 机器中每一个独立的运动单元称为一个构件。由两个构件直接接触组成的可动的连接称为运动副。 分类: a.约束度为1的称为I级副,约束为2的称为II级副,以此类推,最多约束5个自由度。b.通过点接触和线接触的称为高副,通过面接触的称为低副;c.两构件相对运动为转动的称为回转副,相对移动的称为移动副,相对运动为螺旋运动的称为螺旋副等。d.平面运动副、空间运动副2.机构具有确定运动的条件?最小阻力定律? 机构的原动件数目应等于机构的自由度数目,此时机构有确定的运动。机构自由度=原动件数>0 当机构原动件的数目小于机构的自由度时,机构的运动也不是毫无规律,而是遵循最小阻力定律,即优先沿阻力最小的方向运动。 3.平面自由度的计算公式
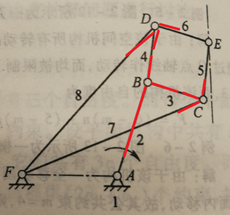
式中n表示活动构件(不包括机架),Pl表示低副,Ph表示高副。 4.计算运动副时要注意的问题 (1)复合铰链 有m个构件组成的复合铰链,共有(m-1)个转动副。 例如下图,活动构件n=7,低副10个,高副0个,自由度F=3X7-2X10=1
(2)两个构件之间组成多个导路平行或重合的移动副时, 认为只形成1个移动副; 两个构件之间组成多个轴线重合的转动副时,认为只形成1个转动副; 如果两构件在多处相接触而构成平面高副,且接触点处的公法线彼此重合,则只能算一个平面高副;如果两构件在多处接触而构成平面高副,但各接触点处的公法线方向并不彼此重合,则相当于一个低副。 5.什么是局部自由度,有什么作用?什么是虚约束,有什么作用?计算自由度时如何处理? 局部运动但是不影响其他机构的运动,产生的自由度叫做局部自由度,可以直接减去或者与连接件焊死处理。 局部自由度不影响整个机构的运动,但把高副接触处的滑动摩擦变为滚动摩擦,减少机构的磨损。 F= 3n-2pl -ph -F’,F’ 表示局部自由度的数目。
机构中,有些运动副引入的约束对机构运动起到重复约束作用,这种约束称为虚约束。在进行机构自由度计算时,需将机构的虚约束除去不记 机构中虚约束存在的充分条件为: 机构满足特定的几何条件;拆下引入虚约束的构件和它参与的运动副后,各构件的相对运动关系不变,机构的自由度数不变。虚约束的作用: ①改善构件的受力情况或平衡,如多个行星轮,对称平行四边形。 ②增加机构的刚度,如轴与轴承、机床导轨。 ③使机构运动顺利,避免运动不确定,如火车车轮驱动机构。 设虚约束个数为p’,机构自由度F公式可写为: F= 3n-(2pl +ph -p’) - F’ 6.什么是基本杆组?平面机构的组成原理? 基本杆组:不能再拆的、最简单的、自由度为零的构件组称为基本杆组 平面机构的组成原理:任何机构都可以看作是由若干个基本杆组依次连接于原动件和机架上所组成的。 |

【本文地址】