| D | 您所在的位置:网站首页 › urdf文件生成 › D |
D
|
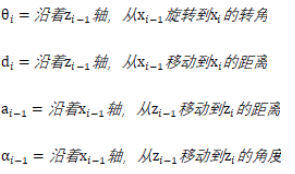
本文仅描述连杆机构的D-H模型转URDF文件方法(纯手打,不依赖SolidWorks),其它机构请自行修改 1.D-H参数表中各参数的意义
标签代表机器人主体 标签代表一个连杆 标签代表一个关节 1. 连杆代表一个连杆,其中有关于连杆所有三维和物理信息的描述:形状,颜色,质量,转动惯量,碰撞体积,详细的描述请移步 |
【本文地址】
公司简介
联系我们
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |
| D | 您所在的位置:网站首页 › urdf文件生成 › D |
|
本文仅描述连杆机构的D-H模型转URDF文件方法(纯手打,不依赖SolidWorks),其它机构请自行修改 1.D-H参数表中各参数的意义
标签代表机器人主体 标签代表一个连杆 标签代表一个关节 1. 连杆代表一个连杆,其中有关于连杆所有三维和物理信息的描述:形状,颜色,质量,转动惯量,碰撞体积,详细的描述请移步 |
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |
| CopyRight 2018-2019 实验室设备网 版权所有 |