| 从左手坐标系到右手坐标系的变换 | 您所在的位置:网站首页 › ug怎么转坐标系 › 从左手坐标系到右手坐标系的变换 |
从左手坐标系到右手坐标系的变换
|
该博客主要参照论文:  左手坐标系和右手坐标系之间的差异就是某一个坐标轴的方向取反,上图中是X轴取反。
左手坐标系和右手坐标系之间的差异就是某一个坐标轴的方向取反,上图中是X轴取反。
和论文原文保持一致,我们以X轴取反为例分析,如何从左手坐标系转换到右手坐标系。其他的情况可以据此类推。 1.坐标点的转换
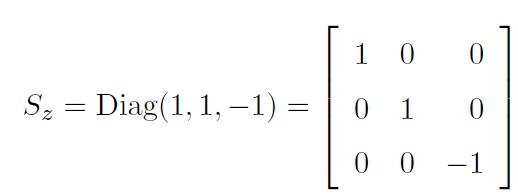
图中显示了左手坐标系中的点有一个正的z分量。在右手坐标系中,观察z分量必须为负。在矩阵向量形式中,从左手点q’到右手点qr的转换是 注意啦 又要划重点啦! 此处坐标点使用的是列向量,列向量左乘在矩阵之后。行向量左乘矩阵、列向量有乘矩阵存在如下区别:AT=B ==>T'A'=B' (其中A和B是点坐标组成的行向量,A'和B'则是转置后所得列向量,T是矩阵) 上面的S_z矩阵具体计算如下所示: 首先,讲一下Heading(航向)是啥。绕Y轴的旋转就是Heading。 划重点啦 首先,此处的矩阵是在左手坐标系中!! 有可能你会发现这个矩阵为啥和有的地方的讲的是转置的关系。 这就是行向量左乘矩阵、列向量右乘矩阵存在如下区别:AT=B ==>T'A'=B'造成的差异 结论就是:上述矩阵是①左手坐标系中列向量右乘时使用,表示绕Y轴旋转h度,也可以是②右手坐标系中行向量左乘时使用,表示绕Y轴旋转h度。 划重点 当然,此处使用的是①。本文所有的讲解都是以左手坐标系为主、以列向量右乘为要求。 引入航向Pitch矩阵作为一种存储旋转坐标方向的简便方法。 该矩阵具有双重功能,因为它还可用于显示原始坐标系中的点(x;y;z)如何旋转到点(x0;y0;z0)。如下所示, 有了Heading矩阵转换的讲解,此处直接粘贴论文,不做中文讲解。
同一个物体在左手坐标系中描述(位姿描述=位置+姿态)是一种形式,换到右手坐标系中描述又是另一种形式。 位置描述的变换是相对简单的,只需要将某一个坐标轴的值取反,也就是与S_z矩阵作用。 姿态描述的变换则需要结合位置描述,原本左手系中描述姿态的旋转矩阵为R_l,转换到右手系中,则为S_z ·R_l·S_z。 |
 链接:https://pan.baidu.com/s/1LzP2UNIHCm8RPg2eQX0rdQ 提取码:hiuc
链接:https://pan.baidu.com/s/1LzP2UNIHCm8RPg2eQX0rdQ 提取码:hiuc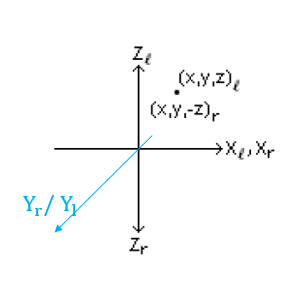 可以从图中看出,同一个小黑点,在左手坐标系中的坐标是(x,y,z),在右手坐标系中的坐标就是(x,y,-z)。
可以从图中看出,同一个小黑点,在左手坐标系中的坐标是(x,y,z),在右手坐标系中的坐标就是(x,y,-z)。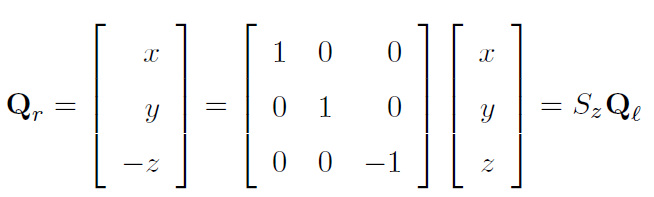
 所以,点坐标从左手坐标系转化到右手坐标系中,只需要对XYZ中某一个分量取反。例如将Z轴取反。
所以,点坐标从左手坐标系转化到右手坐标系中,只需要对XYZ中某一个分量取反。例如将Z轴取反。 
 如果旋转h角度,对应的旋转矩阵如下,该矩阵在位姿控制领域也可以叫航向矩阵:
如果旋转h角度,对应的旋转矩阵如下,该矩阵在位姿控制领域也可以叫航向矩阵: 
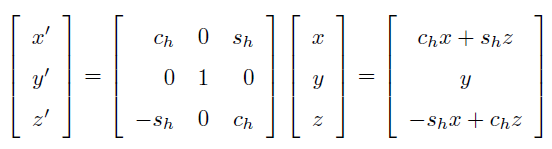 在左手坐标系中,上述等式可以表示为:
在左手坐标系中,上述等式可以表示为:  当把点Q_l(x,y,z)和点Q'_l(x', y', z')都转化到右手坐标系中时,点的坐标变成了Q_r(x,y,-z)和Q'_r(x',y',-z'),那么原本的航向矩阵H_l已经无法使得原等式成立。下面重新推导计算的等式:
当把点Q_l(x,y,z)和点Q'_l(x', y', z')都转化到右手坐标系中时,点的坐标变成了Q_r(x,y,-z)和Q'_r(x',y',-z'),那么原本的航向矩阵H_l已经无法使得原等式成立。下面重新推导计算的等式:  结论: 相对于左手坐标系,右手坐标系中的航向矩阵转化为:H_r = S_z H_l S_z
结论: 相对于左手坐标系,右手坐标系中的航向矩阵转化为:H_r = S_z H_l S_z





【本文地址】