| solidworks模型利用sw2urdf生成urdf模型导入CoppeliaSim(v | 您所在的位置:网站首页 › stl文件打开后没有模型 › solidworks模型利用sw2urdf生成urdf模型导入CoppeliaSim(v |
solidworks模型利用sw2urdf生成urdf模型导入CoppeliaSim(v
|
报错: ERROR: file couldn’t be opened. ERROR: there is no robot in the file.
注意urdf模型文件要放在全英文路径下即可。 第一步,下载sw2urdf插件介绍:http://wiki.ros.org/sw_urdf_exporter 下载:https://github.com/ros/solidworks_urdf_exporter/releases 第二步,打开solidworks,找到工具,插件,勾上
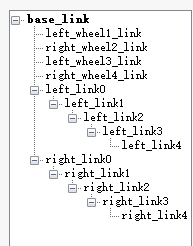
一定是这样的形式:连杆0-关节1-连杆1-…-关节n-连杆n。 确定关节属性,一般在第四步已经设置好parent、coordinates和axis,这里默认就好。我这里名字有点修改。 点击next,确定连杆属性,包括惯性矩,可视化和碰撞体属性
vrep4.0,导入双臂时,左右两臂不能同时恒定速度控制,只有一个臂正常。 在没有设置loop(pid)时,设置enable motor,设置最大力矩很大,速度10rad/s,但不能恒定速度控制,只有速度超过75,机械臂才能越过最高点,已经排除重力、摩擦、碰撞体干涉的原因,发现双臂机械臂自由度的差在2及以上,才能同时恒定速度控制,尚不知道原因。 导入ros,利用moveit_setup_assistant配置前面导出urdf文件时,随之产生了display与gazebo两个launch文件,分别可以在rviz和gazebo中显示机械臂,要控制机械臂动作,需要使用配置助手进行配置。 **注意:**在display,use_gui的参数中改为true就可以显示关节控制面板,此处注意!!!若是urdf文件中没有给定关节限位,则控制面板为空白,且后续moveit_setup_assistant也不能选择pose。 |

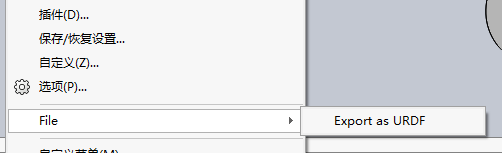


 点击导出urdf and meshes 即可,一定要记住导出在纯英文路径下。
点击导出urdf and meshes 即可,一定要记住导出在纯英文路径下。 找到刚刚那个路径,导入urdf即可。
找到刚刚那个路径,导入urdf即可。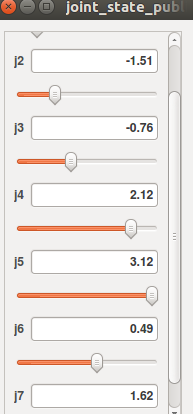

【本文地址】
公司简介
联系我们