| article | 您所在的位置:网站首页 › solidworks雨伞仿真运动 › article |
article
|
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-rOmeEm3I-1685366971102)(data:image/svg+xml;utf8, )]
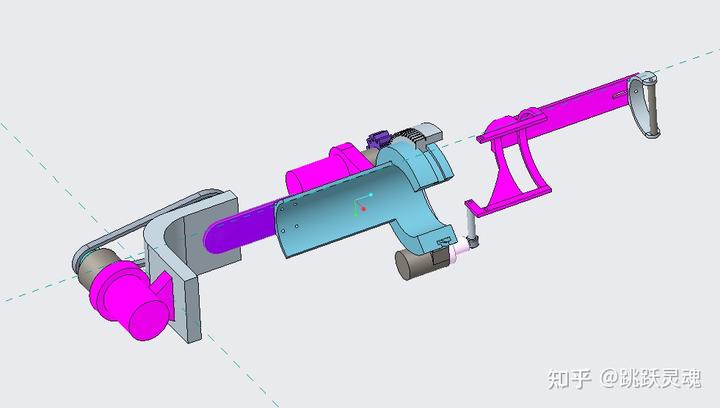
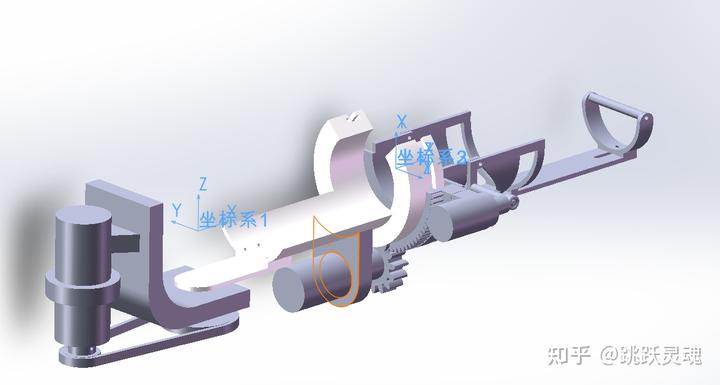
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-kCu0JrBB-1685366971103)(data:image/svg+xml;utf8, )] 建立坐标系 1正运动学分析 采用标准的D-h法进行机械腿模型分析:
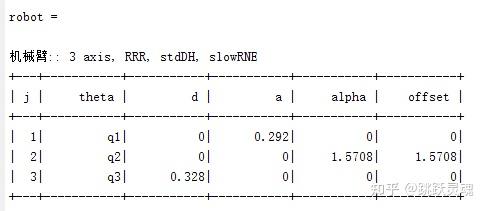
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-XdnViMnl-1685366971103)(data:image/svg+xml;utf8, )] 将连杆坐标系的原点建立在连杆的关节连杆末端。 一、建立D-H连杆坐标系的原则 1.Z,轴沿关节轴i+1的轴向。 2.原点O为Zi.,与Zi轴的交点或其公垂线与关节轴Zi的交点。3.Xi轴沿Zi与Zi轴的公垂线方向,由关节轴i指向关节轴i+1。4.Yi轴按照右手定则确定。 二、D-H参数的含义 1.连杆长度ai:定义为从Zi-1移动到Zi的距离,沿Xi轴指向为正。其实质为公垂线的长度。 2.连杆转角αi:定义为从Z i-1旋转到zi的角度,绕Xi轴正向旋转为正。 3.关节偏距di,:定义为从X i-1移动到Xi的距离,沿Z i-1轴指向为正。其实质为两条公垂线之间的距离。 4.关节角0i,:定义为从X i-1旋转到Xi的角度,绕Zi轴正向旋转为正。 三、相邻坐标系之间的齐次变换矩阵 D-h表如下
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-rU0OlPqc-1685366971104)(data:image/svg+xml;utf8, )] (2)通过(1)求解出机器人各位姿变换矩阵后,求解机器人手臂变换矩阵 **
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-9SYtilS9-1685366971104)(data:image/svg+xml;utf8, )] ** 。通过matlab 计算,写出机器人末端位置。 正运动学分析 根据D-H表规定得到如下变换矩阵为:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-V84narqG-1685366971105)(data:image/svg+xml;utf8, )] 由此可得机器人相邻两关节位姿分别为:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-9OJBS3dA-1685366971105)(data:image/svg+xml;utf8, )]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-hfODIeid-1685366971106)(data:image/svg+xml;utf8, )]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UFY51TOA-1685366971106)(data:image/svg+xml;utf8, )] 所以,坐标系{4}相对于基坐标系的变换矩阵为:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-MFP5dxut-1685366971107)(data:image/svg+xml;utf8, )] 相对于基坐标系的旋转矩阵
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-M1bDbar6-1685366971107)(data:image/svg+xml;utf8, )] 位置矢量
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-WFi8osv6-1685366971108)(data:image/svg+xml;utf8, )] 根据DH参数求解变换矩阵的函数trans: %输入JD,即6个关节变量的值,求解正运动方程 function [ T ] = trans( theta, d, a, alpha ) T =[ cos(theta), -sin(theta)*cos(alpha), sin(theta)*sin(alpha), a*cos(theta); sin(theta), cos(theta)*cos(alpha), -cos(theta)*sin(alpha), a*sin(theta); 0, sin(alpha), cos(alpha), d; 0, 0, 0, 1 ]; end 正向运动学: function [ T06 ] = fkine(JD) %JD为输入的1*6的数组,代表6个关节变量 % trans( theta, d, a, alpha ) if nargin |


【本文地址】
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |