| ADRC自抗扰控制自学笔记(包含simulink仿真)(转载) | 您所在的位置:网站首页 › simulink阶跃输入怎么输入1度 › ADRC自抗扰控制自学笔记(包含simulink仿真)(转载) |
ADRC自抗扰控制自学笔记(包含simulink仿真)(转载)
|
他这里让我很好理解了跟踪微分器 非线性PID(准确说是非线性PD,所以可以看到输入是两根线而不是三根线) 也就是说传统PID是线性的?但是不是那些系统是非线性的,比如无人机,平衡车,只是小幅度里近似为线性的。 下面这个来自于:https://zhuanlan.zhihu.com/p/115283894
他这里确实让我对ADRC的理解更进了一个层面。现在对ADRC有了比较清晰的认识,并不神秘并不高深,其实还好。还是很好理解的。 下面这个来自这篇https://zhuanlan.zhihu.com/p/115283894 扩张状态观测器(ESO) (1)功能 估计系统内外扰动的实时作用值,并在反馈中给予补偿,用补偿的方法消除扰动的影响,从而具有抗干扰的作用。 所以它的输入是从被控对象的前后两个输入,这样也好理解。
摘自:https://blog.csdn.net/zouxu634866/article/details/106287879#comments_12978720 ADRC自抗扰控制自学笔记(包含simulink仿真)
总被蚊子叮的小旭 2020-05-22 17:59:36 1856 收藏 28 分类专栏: 控制 版权 ADRC控制中包含三个主要的部分: 跟踪微分器,非线性状态反馈(非线性组合),扩张观测器。
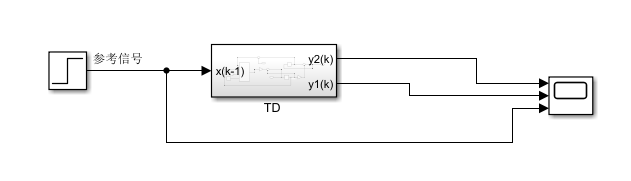
继承了经典PID控制器的精华,对被控对象的数学模型几乎没有任何要求,又在其基础上引入了基于现代控制理论的状态观测器技术,将抗干扰技术融入到了传统PID控制当中去,最终设计出了适合在工程实践中广泛应用的全新控制器。 本博客将从0开始,逐一介绍每一个部分,最后在合起来实现ADRC,每个部分都将介绍其公式原理和仿真实验。 一、跟踪微分器(TD)这是一个单输入双输出的模块,作用有两个: 避免输入量不要有跳变,便于实际系统实时跟踪。因为传统的pid有个问题,就是当跟踪像阶跃信号这种突变信号时超调和上升时间共存的现象,所以我们的思路就是对输入的信号进行平滑处理,也就是避免其出现突变。过滤高频噪声所以输出1就是处理过的信号,第二个信号是输出1的微分,输出1和2都将用于下一环节,这里不介绍。 先摆出他的输出效果图,输入为阶跃信号: 说明:蓝色为处理后的阶跃信号,显然就好很多,没有那么突变。黄色为微分。 TD公式:
公式不难理解,接下来,我将对TD进行simulink仿真,其中fst函数我用的脚本写的:
友情提示:离散差分方程建模和连续系统微分方程建模一样,先找准输出y(k),再找准y(k-1)…,然后他们之间用单位延迟连接,最后在这基础上连其他东西。 hfst函数模块: function out = hfst(u1,u2,r,h) d=r*h; d0=h*d; y=u1+h*u2; a0=sqrt(d*d+8*r*abs(y)); a=0; out1=0; if abs(y)>d0 a=u2+(a0-d)/2*sign(y); end if abs(y)d out1=-r*sign(a); end if abs(a)d0 a=y2k_1+(a0-d)/2*sign(y); end if abs(y)d out1=-delta*sign(a); end if abs(a) |


 ADRC特点:
ADRC特点:



【本文地址】
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |