| 「自控原理」5.1 频率特性及其图示 | 您所在的位置:网站首页 › simulink仿真频率特性 › 「自控原理」5.1 频率特性及其图示 |
「自控原理」5.1 频率特性及其图示
|
本节介绍频率特性法的基本概念 本节介绍典型环节的幅相频率特性和对数频率特性 本节介绍绘制开环系统的Nyquist图和Bode图 文章目录 频率特性的基本概念幅相频率特性 Nyquist典型环节的幅相特性曲线开环幅相特性曲线0 1 2 3型系统的开环Nyquist其他型别系统的开环Nyquist 对数频率特性 Bode半对数座标系典型环节的对数频率特性曲线例题与其他概念 开环对数频率特性非最小相角系统 对数幅相特性 Nichols前一章讲了根轨迹法,属于一种复域分析方法。而除了在复域中处理输入输出,还可以在频域中处理(实际上频域中处理更加常用),所以这里介绍频率特性分析法。 频域分析,实际上就是研究稳态正弦响应的 幅值 和 相角 随频率的变化规律。 频域分析法通过研究开环频率特性进而研究闭环稳定性及性能。 与根轨迹相同,也是一种图解分析法,所以方便实用但也有一定的近似性。 频率特性的基本概念什么是频率响应? 频率特性是指线性系统稳态正弦响应的幅值、相角随输入频率变化的规律性 频率特性的定义 方法1: 分别定义幅值和相角
{
∣
G
(
i
ω
)
∣
=
∣
c
s
(
t
)
∣
∣
r
(
t
)
∣
∠
G
(
j
ω
)
=
∠
c
s
(
t
)
−
∠
r
(
t
)
\left\{ \begin{aligned} |G(i\omega)|=&\frac{|c_s(t)|}{|r(t)|}\\ \angle G(j\omega)=&\angle c_s(t)-\angle r(t) \end{aligned} \right.
⎩
⎨
⎧∣G(iω)∣=∠G(jω)=∣r(t)∣∣cs(t)∣∠cs(t)−∠r(t) 这两个公式分别称为幅频特性和相频特性 方法2: 利用复域传递函数
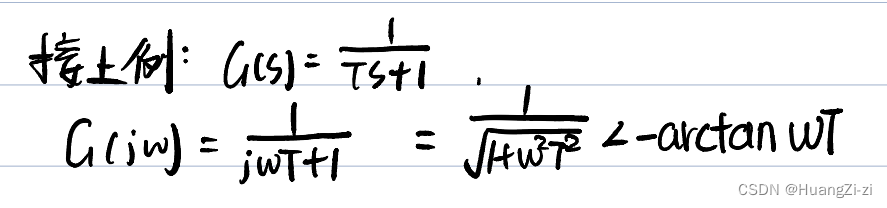
G
(
j
ω
)
=
G
(
s
)
∣
s
=
j
ω
G(j\omega)=G(s)|_{s=j\omega}
G(jω)=G(s)∣s=jω 方法3: 利用fourier变换
G
(
j
ω
)
=
C
(
j
ω
)
R
(
j
ω
)
G(j\omega)=\frac{C(j\omega)}{R(j\omega)}
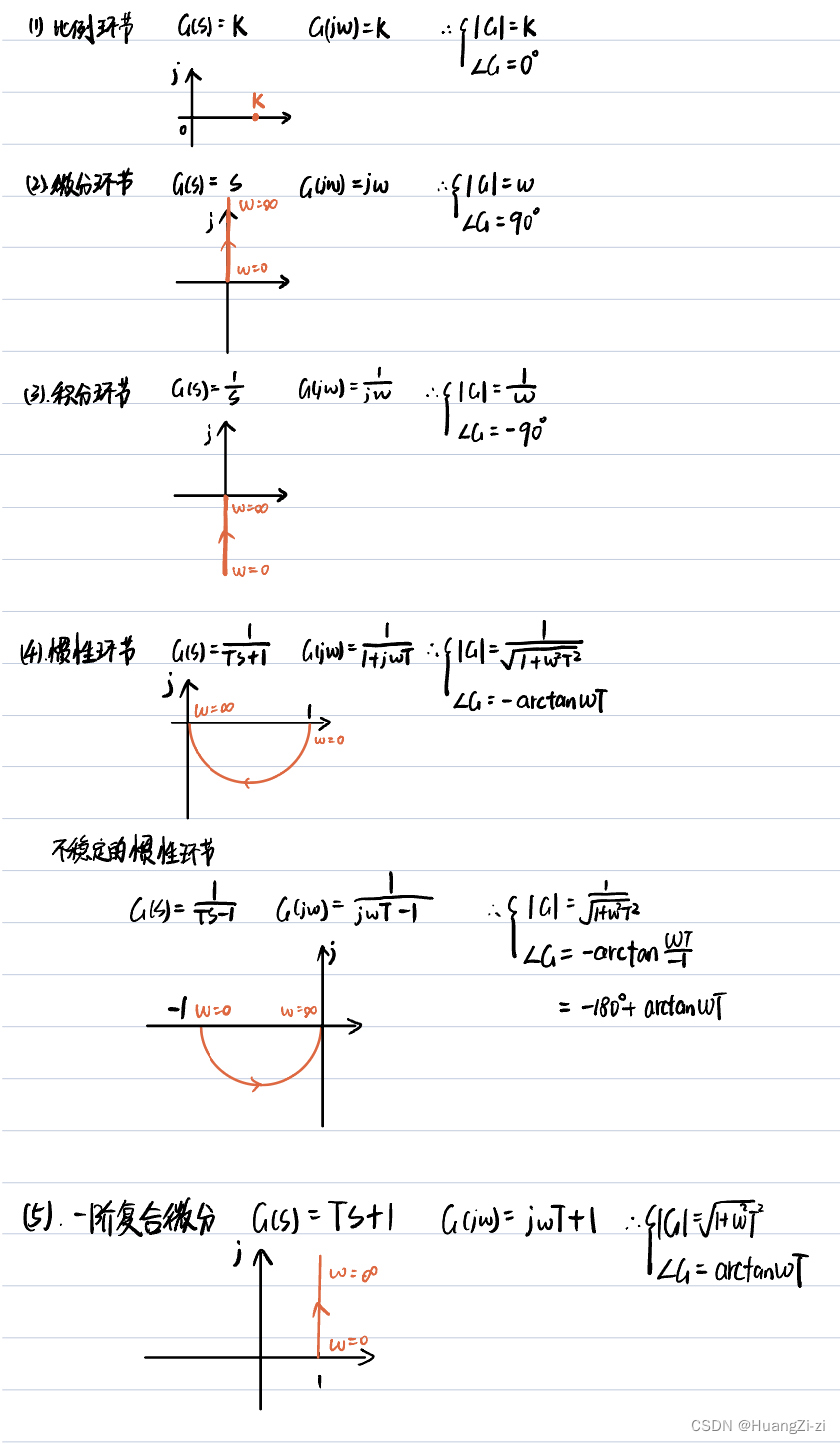
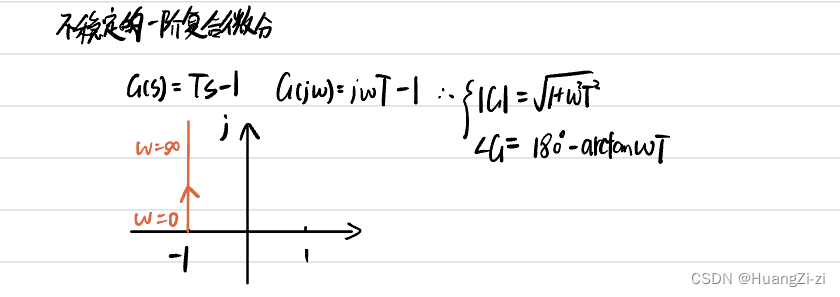
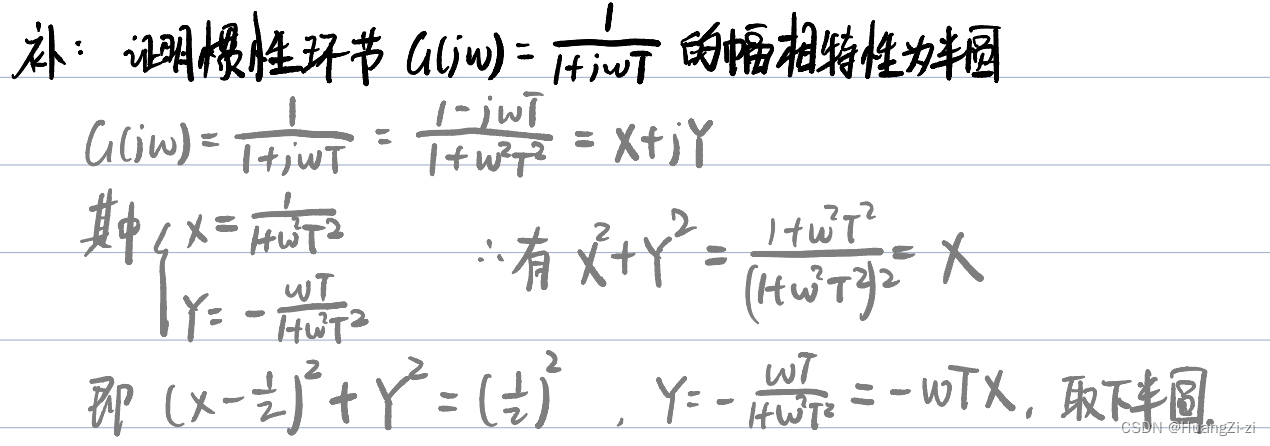
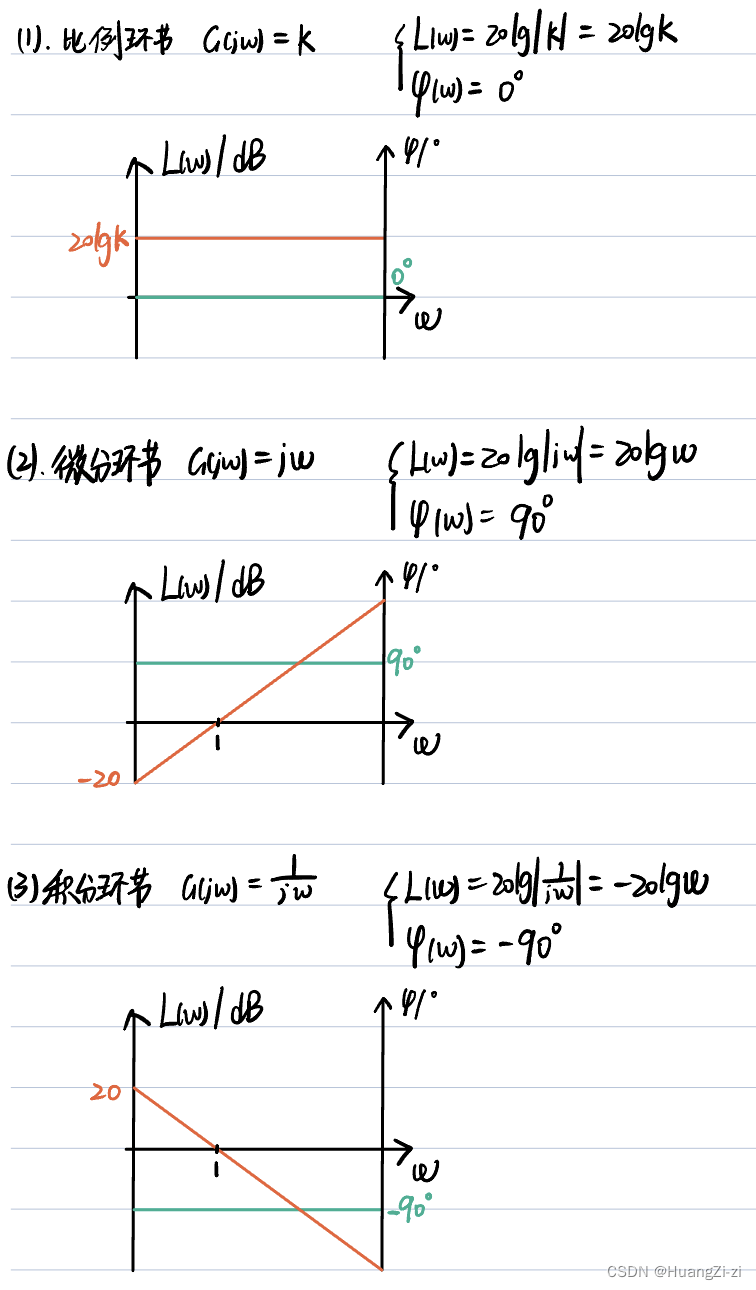
G(jω)=R(jω)C(jω) 接下来根据定义做一道例题: 要表示系统频率特性,可以采用多种不同的方法: 也叫做极座标图。在复平面上,频率特性可以表示为一个向量,向量的长度表示频率特性的幅值,向量与实轴正方向的夹角为频率响应的相位,这样就构成了Nyquist图。 典型环节的幅相特性曲线比例 微分 积分 惯性 一阶复合微分环节
现在再来看Nyquist图,颇有一种根轨迹的感觉。平面叫做G平面,也就是说平面上的每一个点都表示一个
G
(
j
ω
)
G(j\omega)
G(jω)。随着
ω
\omega
ω的取值从0到无穷,频率特性留下的轨迹就成为了幅相特性曲线。 根据一个点的位置,可以知道
G
(
j
ω
)
G(j\omega)
G(jω)的幅值和相位,但并不能直接读出
ω
\omega
ω 震荡环节
震荡环节和之前最大的不同就是根据 ξ \xi ξ的不同,Nyquist图的形状也不同。 研究曲线的形状,求幅值的最值: 2.引入谐振频率和谐振峰值来表示幅值最大点的频率和幅值。 由图像反求传递函数: 二阶复合微分环节
延迟环节
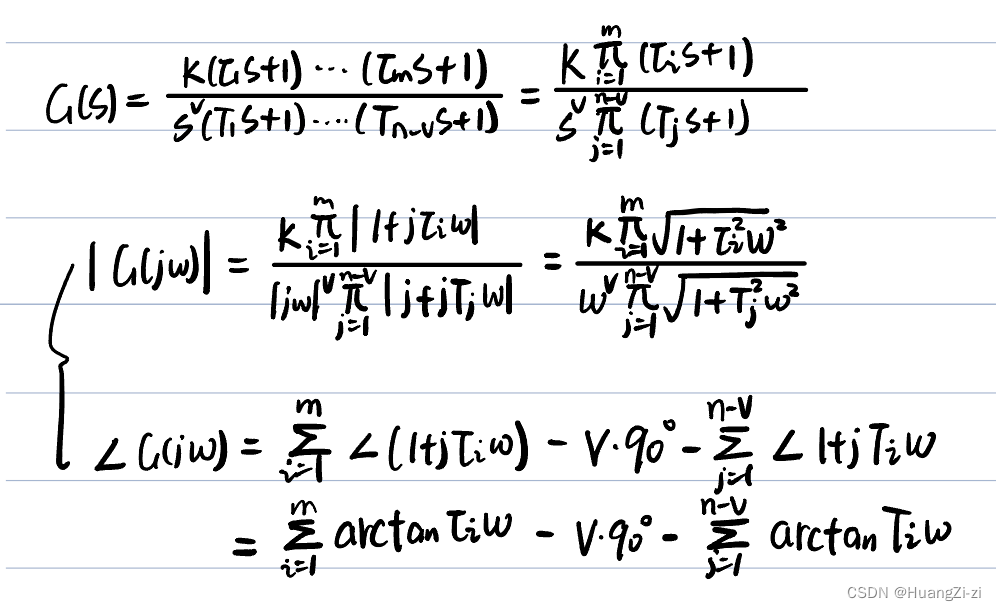
之前是每一个环节分开来。现在直接从开环传递函数入手。仍然是分成幅值和相角两个方面分别计算,再合成为矢量。根据
ω
\omega
ω的变化绘制成曲线。 看这个例题: 来看个例题: 那如果不是0 1 2 3型系统,而是其他型别该怎么办? 其他型别系统的开环Nyquist
Nyquist图计算比较繁琐,而且无法直观看出每个零点和极点的影响。而Bode图更加方便因此工程实际中使用更多。 Bode图由对数幅频曲线和对数相频曲线两部分组成。 半对数座标系Bode图是画在半对数座标系里面的。 横轴:频率
ω
\omega
ω,但按照频率的对数
lg
ω
\lg \omega
lgω标定 纵轴1:对数幅值(Logarithm magnitude,简称Lm)
L
m
G
(
j
ω
)
=
20
lg
∣
G
(
j
ω
)
∣
LmG(j \omega)=20\lg |G(j\omega)|
LmG(jω)=20lg∣G(jω)∣,线性标定 纵轴2:相角,线性标定 两个纵轴都很好理解,一个是对幅值取对数×20,一个就是相角本身,也都是线性标度。 而对于横轴,由于划分刻度是按照对数,因此疏密不一。这里一定要注意:横座标上的某个点,直接读出其座标值,是频率,而不是频率对数 对数分度,有"等距等比"的性质,也就是当变量增大或减小10倍(记为dec,称为十倍频或者旬距)时,座标间的距离变化一个单位长度。 典型环节的对数频率特性曲线part1:比例 微分 积分 惯性 一阶复合微分环节
注意: 震荡 二阶复合微分 延迟环节
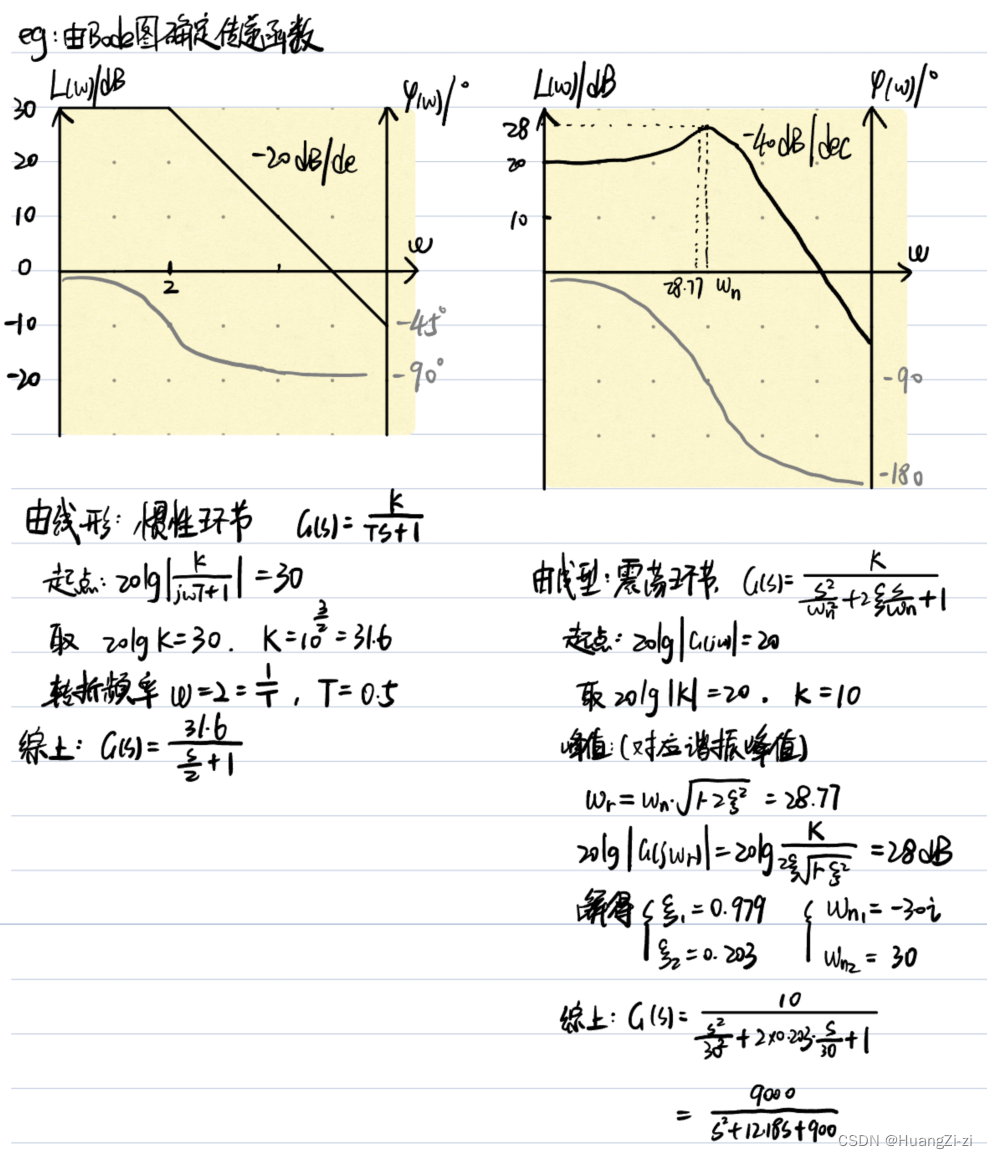
例题由图像倒求传递函数 转折频率 对数幅值频率特性拐弯的点 对于惯性、一阶复合微分:
1
T
\frac{1}{T}
T1 对于震荡、二阶复合微分:
ω
n
\omega_n
ωn 之前都是画的近似曲线,变成折线,但实际上在转折频率处
L
(
ω
)
L(\omega)
L(ω)已经有改变了。以惯性环节为例,在转折频率处有-3dB的衰减 截止频率 对数幅值频率特性为0的点,也就是 ∣ G ( j ω c ) ∣ = 1 |G(j\omega_c)|=1 ∣G(jωc)∣=1 开环对数频率特性
绘制开环Bode图的步骤 将开环传递函数化为尾1标准型列出每一个环节的转折频率确定基准线(最小的转折频率左边的情况) 基准线过点( ω = 1 , L ( 1 ) = 20 lg K \omega=1,L(1)=20\lg K ω=1,L(1)=20lgK) 斜率 − 20 v d B / d e c -20v\ dB/dec −20v dB/dec,v为系统型别叠加做图: 惯性、一阶复合微分 ∓ 20 d B / d e c \mp20dB/dec ∓20dB/dec 震荡、二阶复合微分 ∓ 40 d B / d e c \mp40dB/dec ∓40dB/dec修正: 两惯性环节转折频率很接近时 → \to →用圆弧修正 震荡环节 ξ < 0.38 或 ξ > 0.8 时 → \xi0.8时\to ξ0.8时→用曲线表示检查: L ( ω ) L(\omega) L(ω)最右端斜率为 − 20 ( n − m ) d B / d e c -20(n-m)dB/dec −20(n−m)dB/dec 转折点个数=惯性、一阶复合微分、震荡、二阶复合微分环节个数和 φ ( ω ) → − 90 ° ( n − m ) \varphi(\omega)\to -90\degree(n-m) φ(ω)→−90°(n−m)
紧接着借这道例题讲一下Nyquist图和Bode图的对应关系: 例题:从对数频率特性反求传递函数 最后在这里拓展一下: 先来看一道例题: 之前在没有给出相频特性的情况下,默认所有环节都是稳定的。但是如果给出了相频特性,就需要根据这条曲线来确定具体哪些环节稳定而哪些环节不稳定了。 在这里就涉及到了非最小相角系统: 在右半S平面存在开环零、极点,或带有纯延时环节的系统称为非最小相角系统。 如果更加直观的解释,就是系统的各个环节中,含有某一个或几个不稳定环节或者纯延时环节。 也就是前面那个例题,在+ -,- +,- -的情况下,都属于非最小相角系统。 之所以叫做非最小相角系统,是因为相比最小相角系统,非最小相角系统相角变化的绝对值一般更大 但值得注意的是:非最小相角系统未必不稳定 对数幅相特性 Nichols使用得比较少,只简单介绍一下。 相当于把Bode图的幅值、相角两条曲线合为一条。以相角 φ ( ω ) \varphi(\omega) φ(ω)为横座标,对数幅值 L ( ω ) L(\omega) L(ω)为纵座标,根据频率 ω \omega ω变化,描绘出对应的点形成的曲线。 |
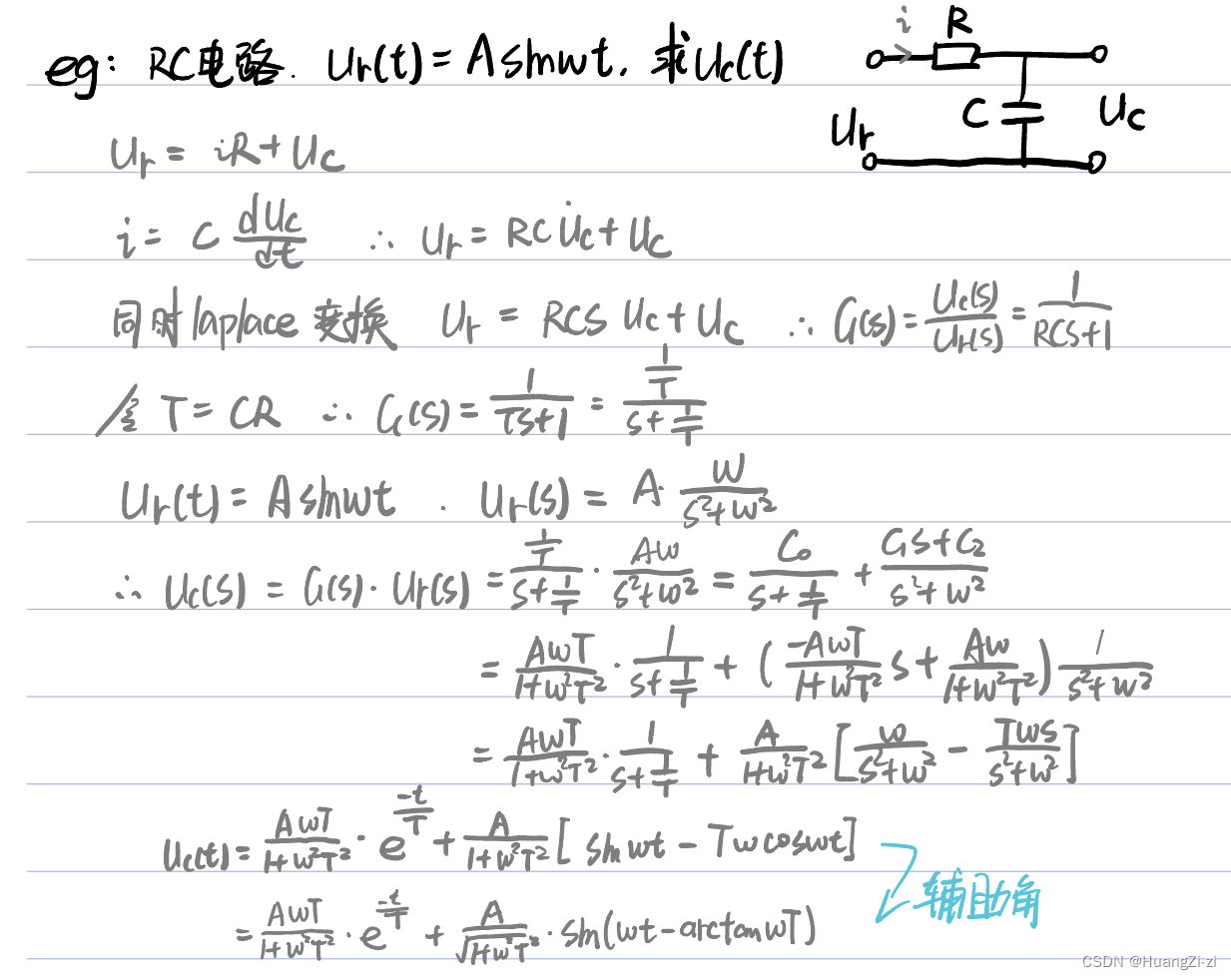 比如在这里解出来uc(t),里面含有
ω
\omega
ω,说明输出与输入的频率有关。这个规律就叫做频率特性
比如在这里解出来uc(t),里面含有
ω
\omega
ω,说明输出与输入的频率有关。这个规律就叫做频率特性 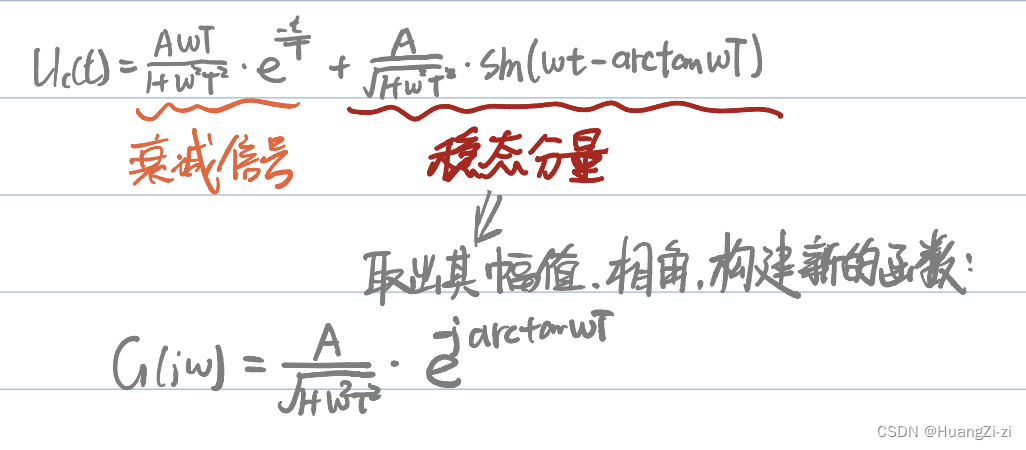 输出第一项将随着时间增大而趋于0,称为衰减信号或瞬态分量 而第二项是一个正弦函数形式,频率为
ω
\omega
ω,称为稳态分量 取出稳态分量,也就是得到稳态正弦响应。这个正弦函数的幅值
∣
G
(
j
ω
)
∣
|G(j\omega)|
∣G(jω)∣和相位
ϕ
(
ω
)
\phi(\omega)
ϕ(ω)均为频率
ω
\omega
ω的函数,因此可以构建一个频率传递函数,分别对应其幅值和相角,记为:
G
(
j
ω
)
=
∣
G
(
j
ω
)
∣
e
j
ϕ
(
ω
)
G(j\omega)=|G(j\omega)|e^{j\phi(\omega)}
G(jω)=∣G(jω)∣ejϕ(ω)
G
(
j
ω
)
G(j\omega)
G(jω)就是系统的频率特性。
输出第一项将随着时间增大而趋于0,称为衰减信号或瞬态分量 而第二项是一个正弦函数形式,频率为
ω
\omega
ω,称为稳态分量 取出稳态分量,也就是得到稳态正弦响应。这个正弦函数的幅值
∣
G
(
j
ω
)
∣
|G(j\omega)|
∣G(jω)∣和相位
ϕ
(
ω
)
\phi(\omega)
ϕ(ω)均为频率
ω
\omega
ω的函数,因此可以构建一个频率传递函数,分别对应其幅值和相角,记为:
G
(
j
ω
)
=
∣
G
(
j
ω
)
∣
e
j
ϕ
(
ω
)
G(j\omega)=|G(j\omega)|e^{j\phi(\omega)}
G(jω)=∣G(jω)∣ejϕ(ω)
G
(
j
ω
)
G(j\omega)
G(jω)就是系统的频率特性。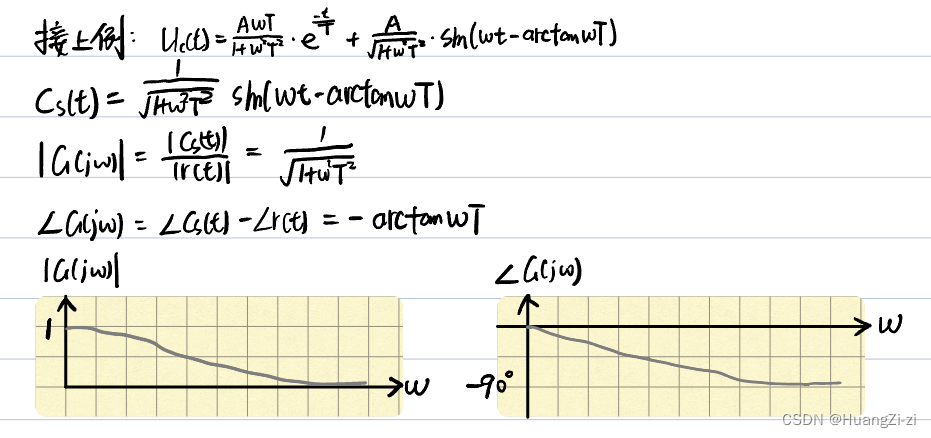
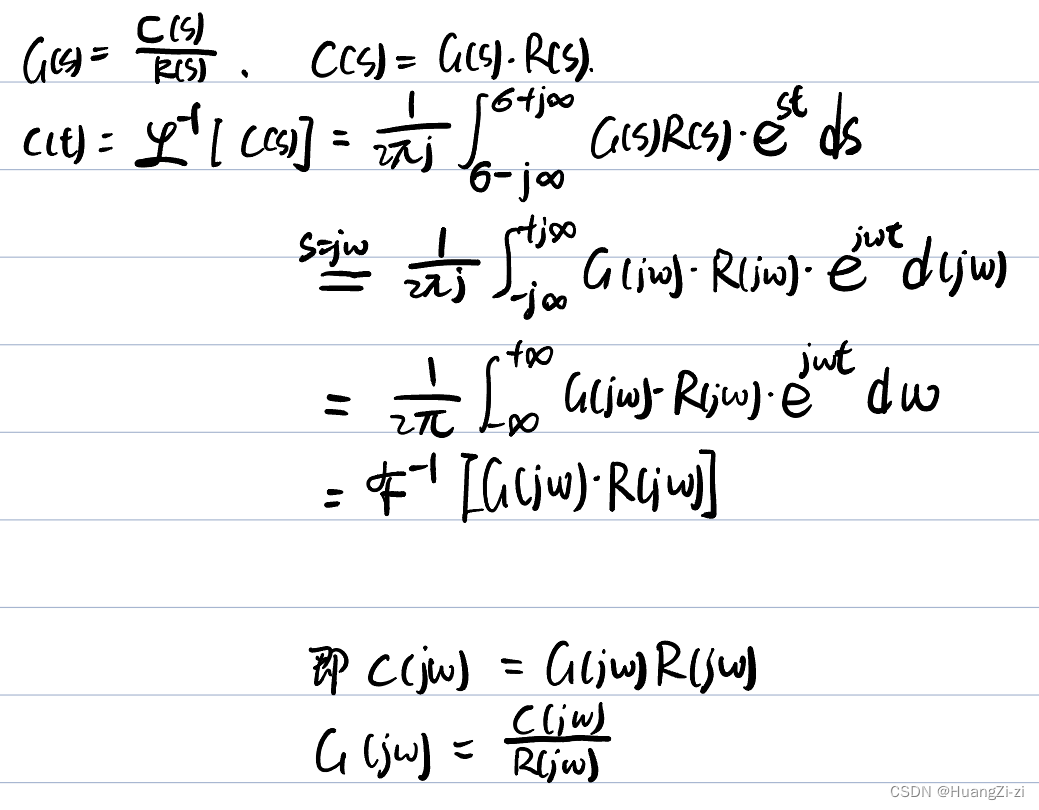 也就是先通过复域传递函数,进行拉氏反变换,然后把s替换成
j
ω
j\omega
jω,化简之后发现变成了傅氏反变换的形式,因此推导出这个公式。
也就是先通过复域传递函数,进行拉氏反变换,然后把s替换成
j
ω
j\omega
jω,化简之后发现变成了傅氏反变换的形式,因此推导出这个公式。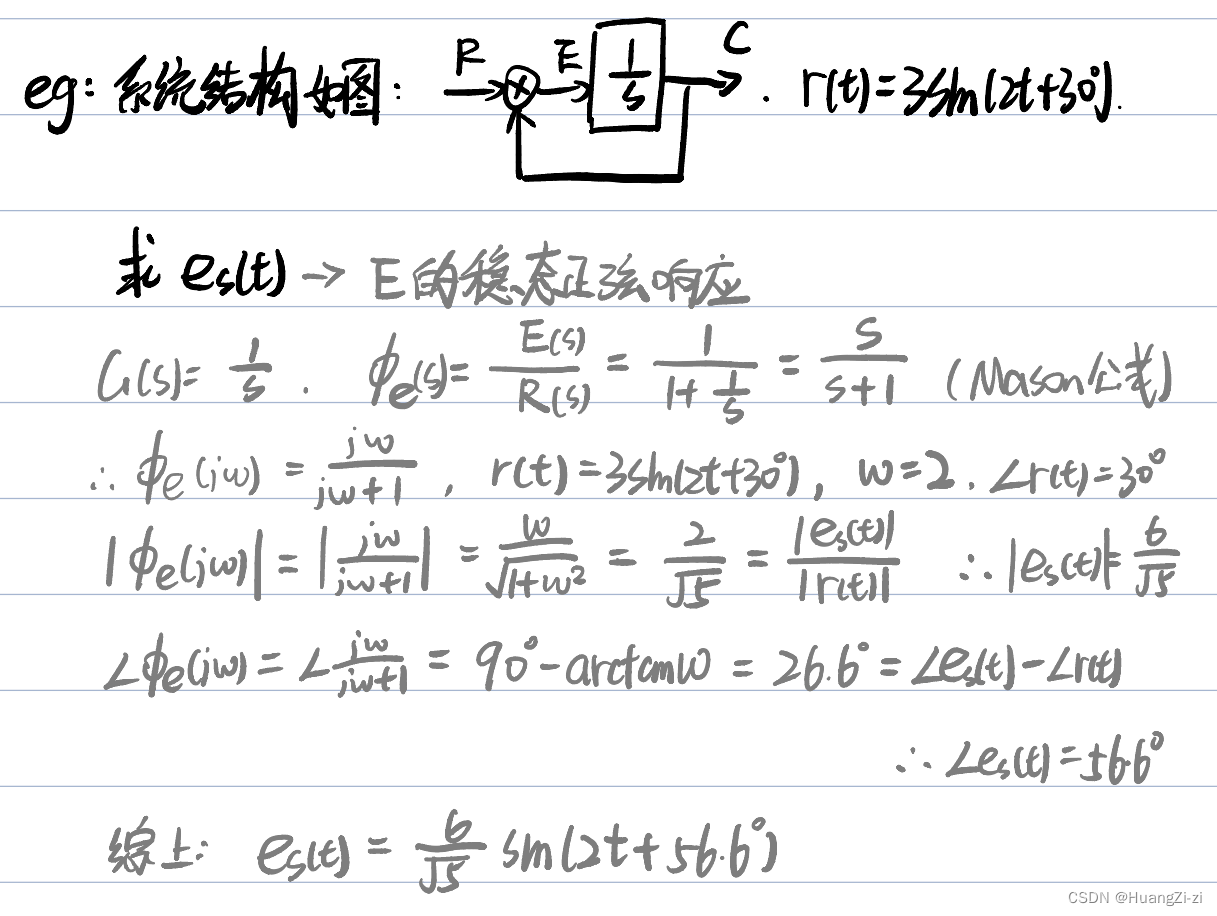 由于稳态正弦响应一定是与输入频率相同的正弦函数,所以只需要确定出幅值和相位就可以写出函数了。
由于稳态正弦响应一定是与输入频率相同的正弦函数,所以只需要确定出幅值和相位就可以写出函数了。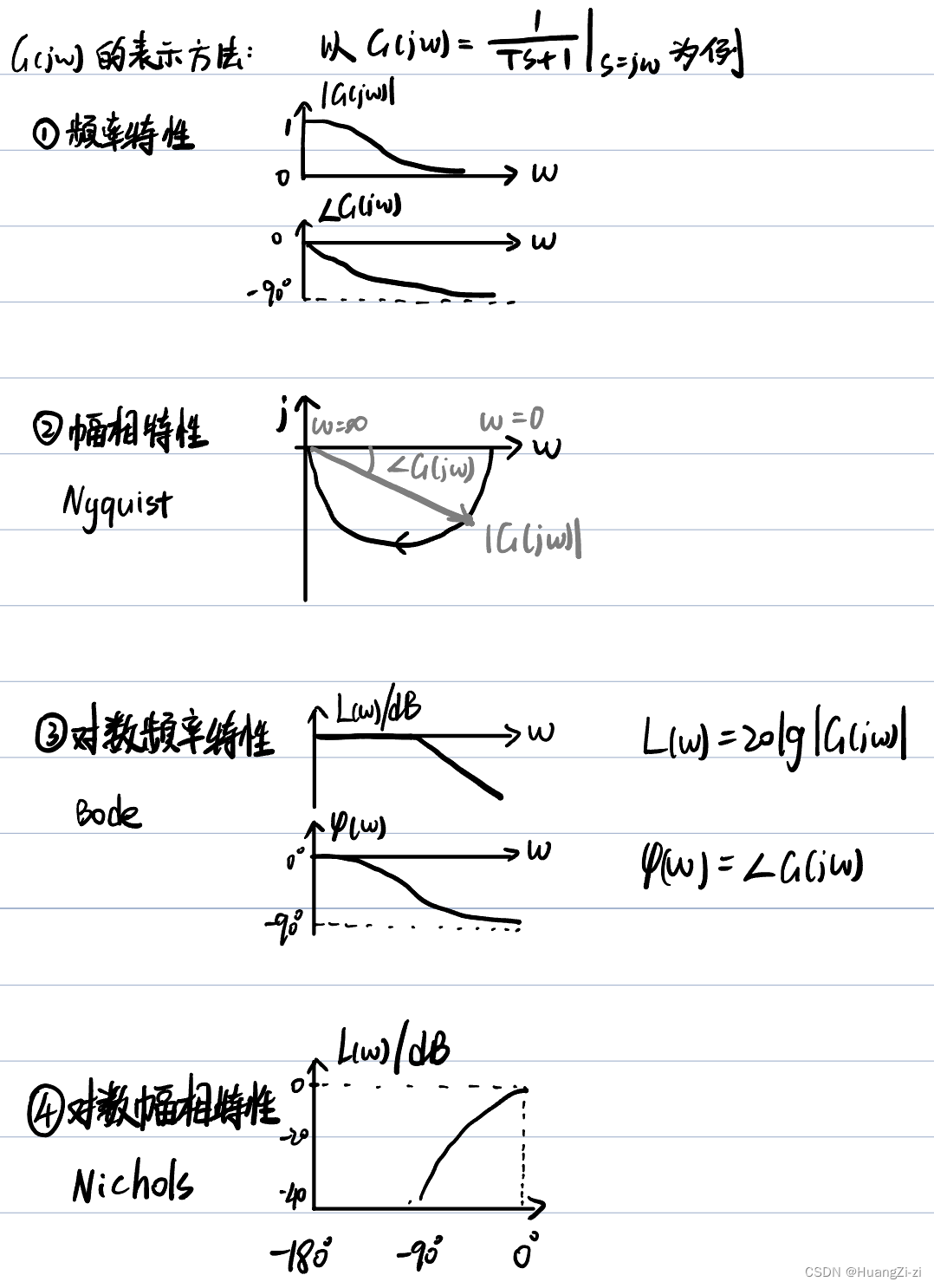
 之前都是已知系统传递函数来画图。但也可以从Nyquist图反求系统传递函数:
之前都是已知系统传递函数来画图。但也可以从Nyquist图反求系统传递函数: 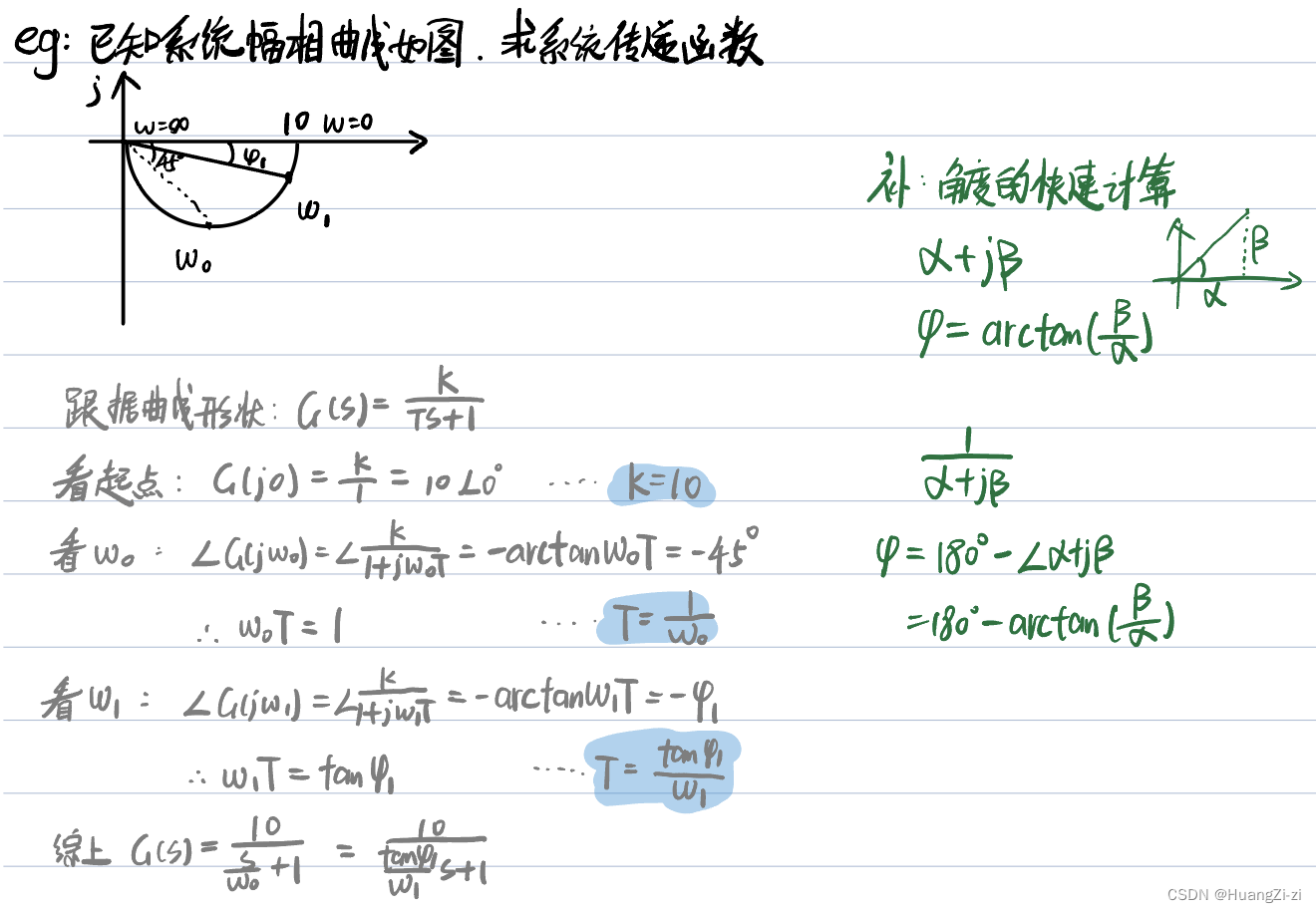
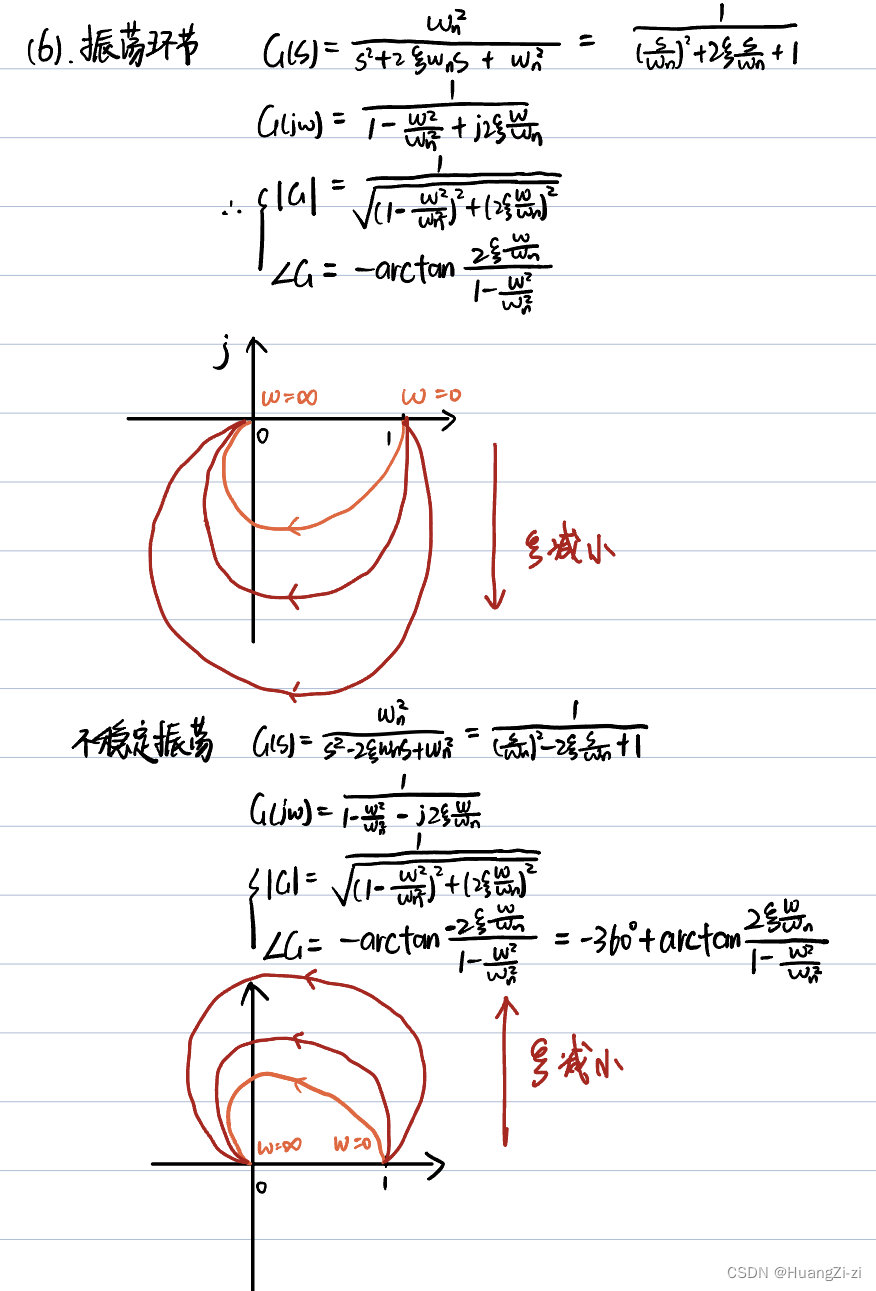
 1.在
ξ
\xi
ξ较大时,随
ω
\omega
ω增大,幅值单调减小,也就是曲线一直趋近原点。时间响应该震荡依旧震荡 而
ξ
\xi
ξ较小时,随
ω
\omega
ω增大,幅值先增大后减小,也就是曲线先远离原点,再趋近原点。
1.在
ξ
\xi
ξ较大时,随
ω
\omega
ω增大,幅值单调减小,也就是曲线一直趋近原点。时间响应该震荡依旧震荡 而
ξ
\xi
ξ较小时,随
ω
\omega
ω增大,幅值先增大后减小,也就是曲线先远离原点,再趋近原点。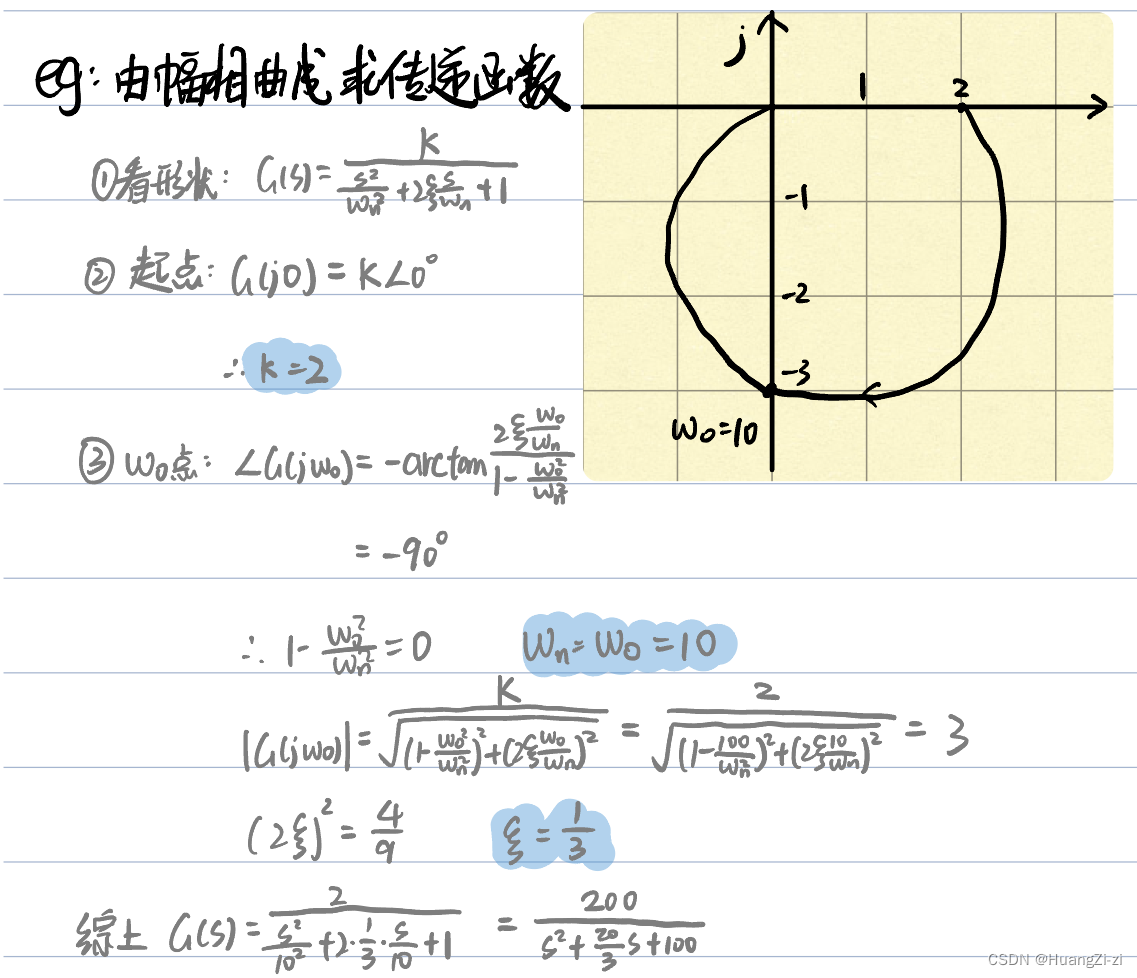
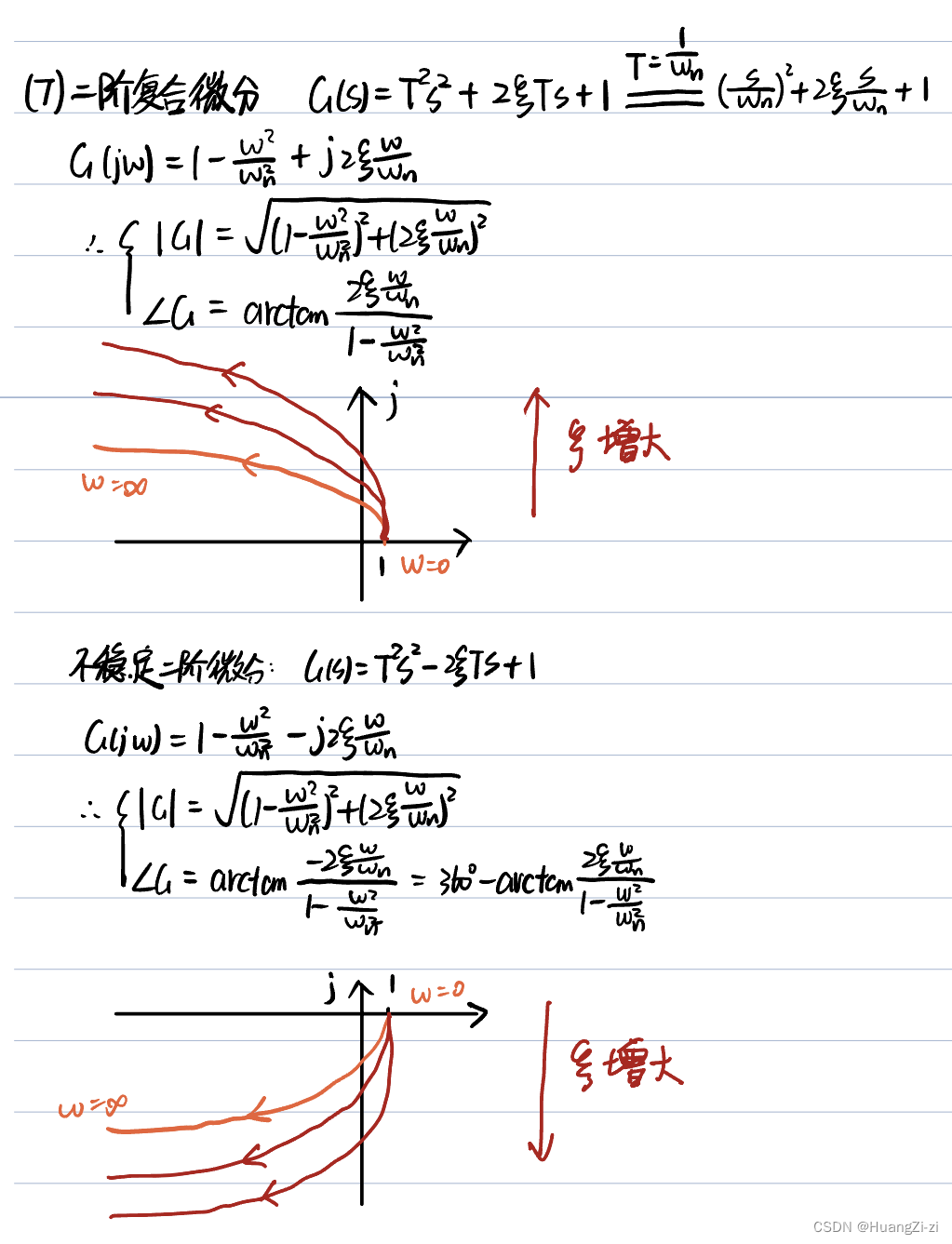 「这个不稳定二阶微分,还有前面的不稳定一阶复合微分,是我自己瞎取的名字,方便和不稳定震荡环节、不稳定惯性环节相对应」
「这个不稳定二阶微分,还有前面的不稳定一阶复合微分,是我自己瞎取的名字,方便和不稳定震荡环节、不稳定惯性环节相对应」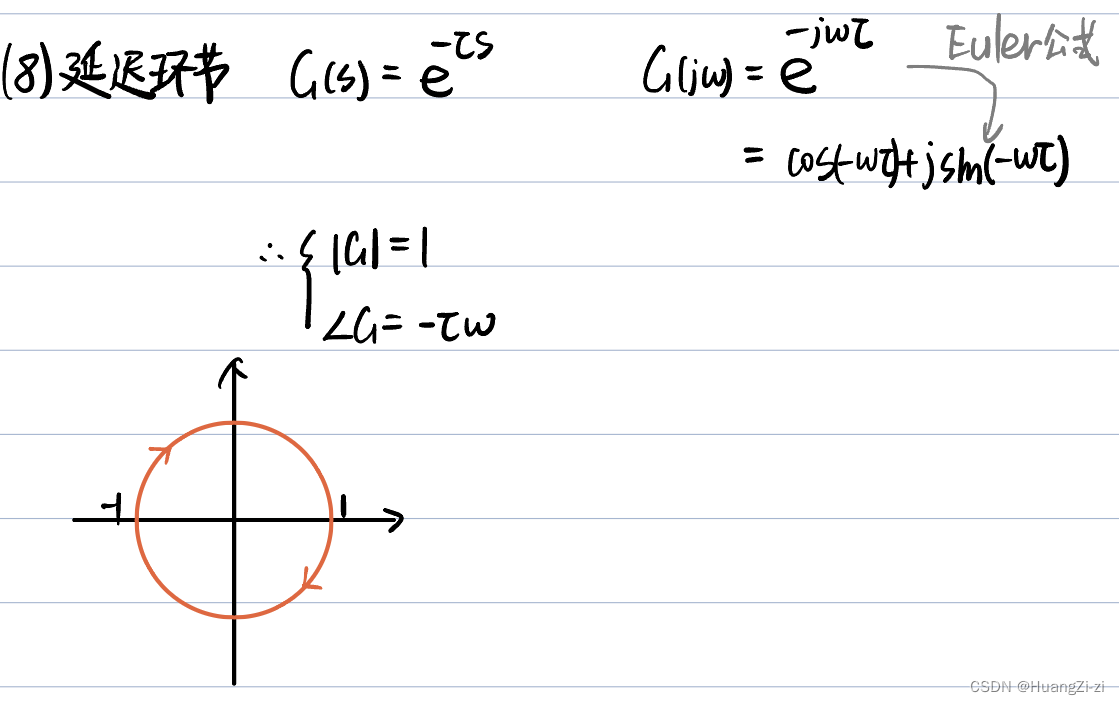
 绘制开环幅相特性一般不要求高精度,所以根据起点、终点,大概勾勒出形状即可。如果有更高的要求,可以代入与实轴的交点等条件增加精度。
绘制开环幅相特性一般不要求高精度,所以根据起点、终点,大概勾勒出形状即可。如果有更高的要求,可以代入与实轴的交点等条件增加精度。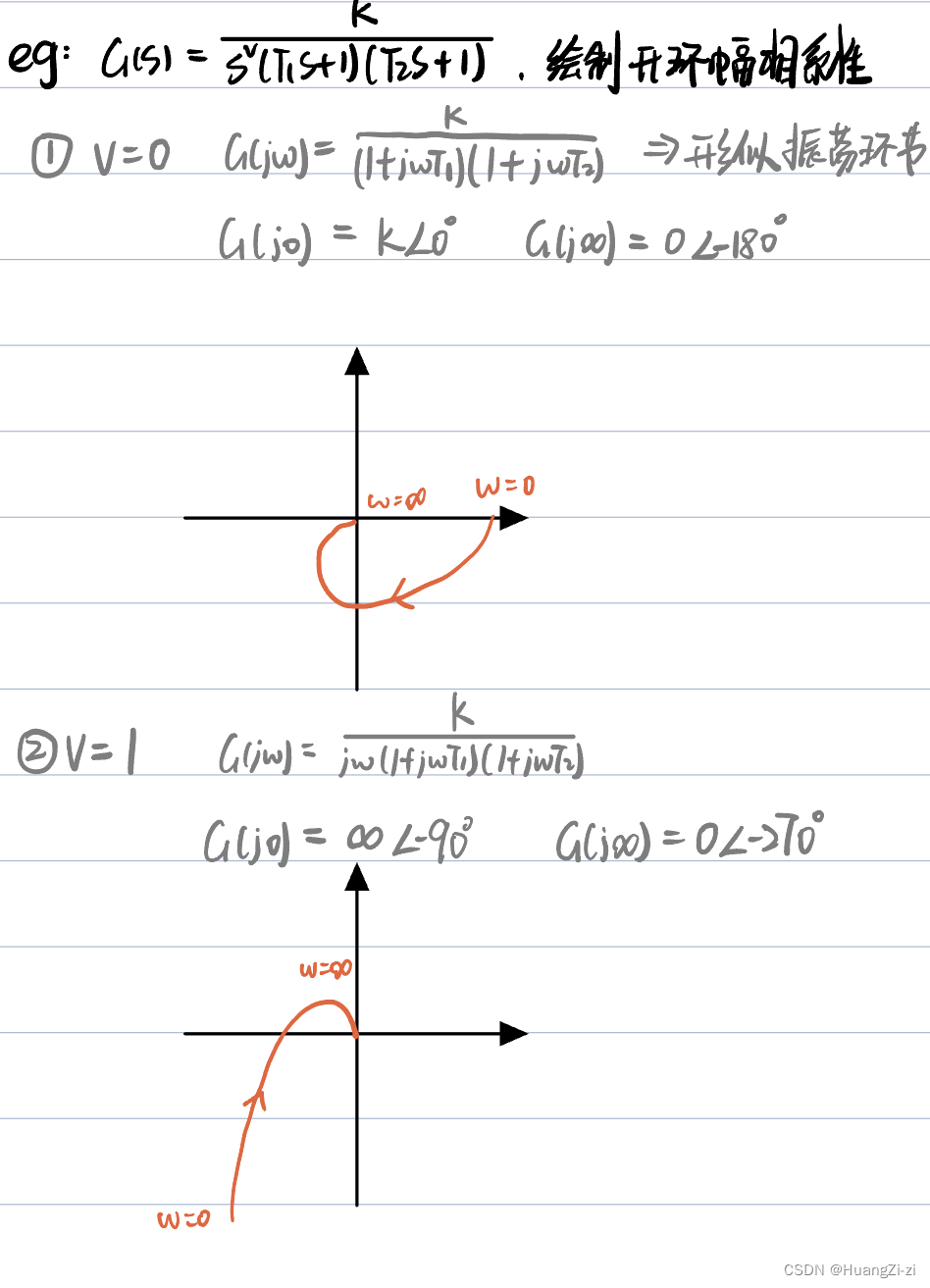
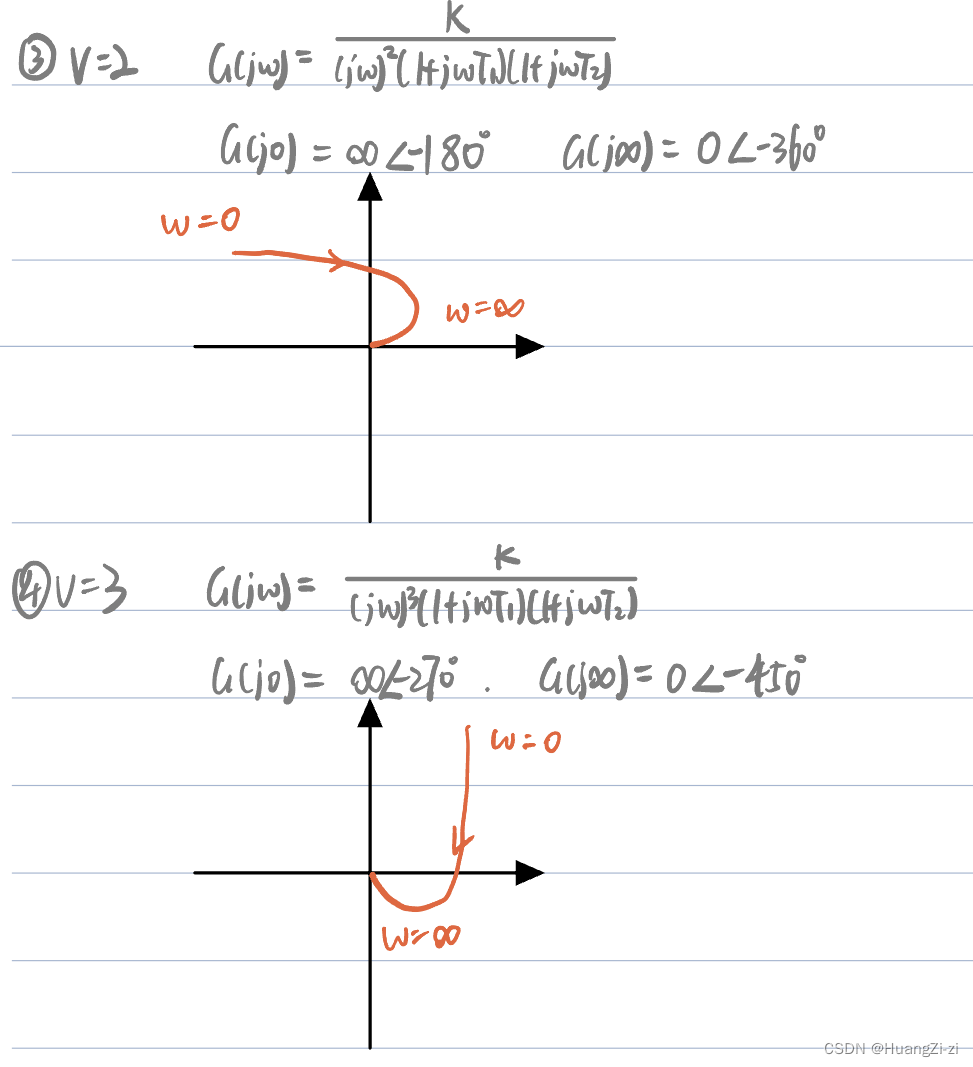 也就是说不同的系统型别,开环幅相特性曲线朝向是不同的。而对于某一型的系统,可以根据这个例题,直接勾勒出对应的曲线形状。
也就是说不同的系统型别,开环幅相特性曲线朝向是不同的。而对于某一型的系统,可以根据这个例题,直接勾勒出对应的曲线形状。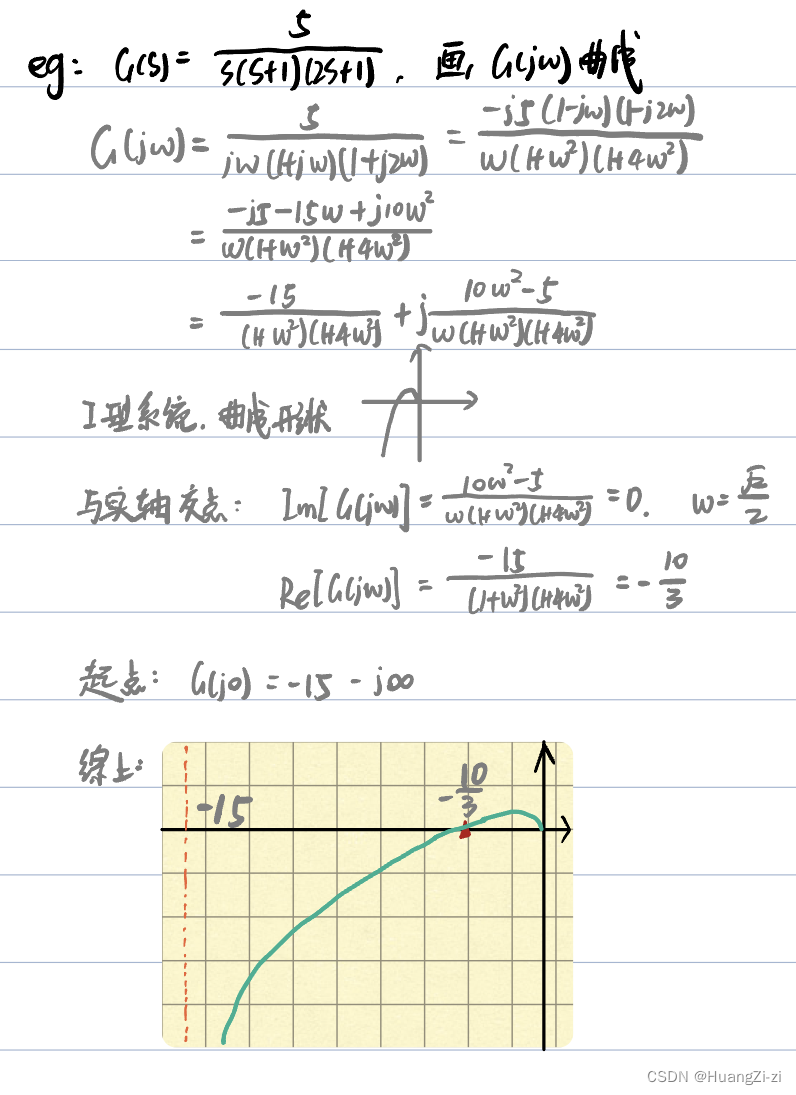 基本思路:实部虚部分开,计算与实轴的交点,找出渐近线,再根据相应系统的型别对应的曲线形状勾勒出曲线。
基本思路:实部虚部分开,计算与实轴的交点,找出渐近线,再根据相应系统的型别对应的曲线形状勾勒出曲线。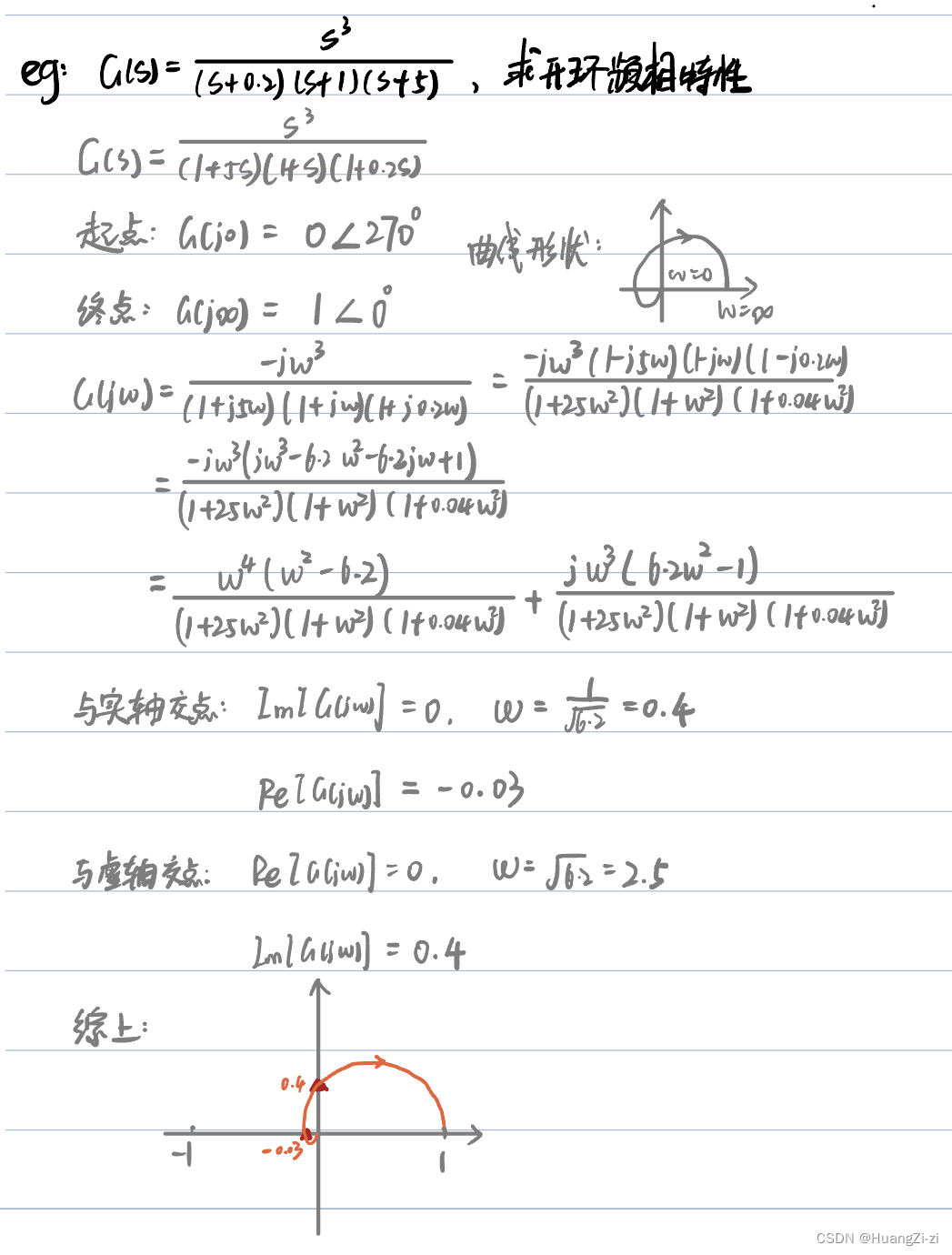 那就先根据起点和终点勾勒出一个形状,再实部虚部分开计算与座标轴的交点,描绘曲线。
那就先根据起点和终点勾勒出一个形状,再实部虚部分开计算与座标轴的交点,描绘曲线。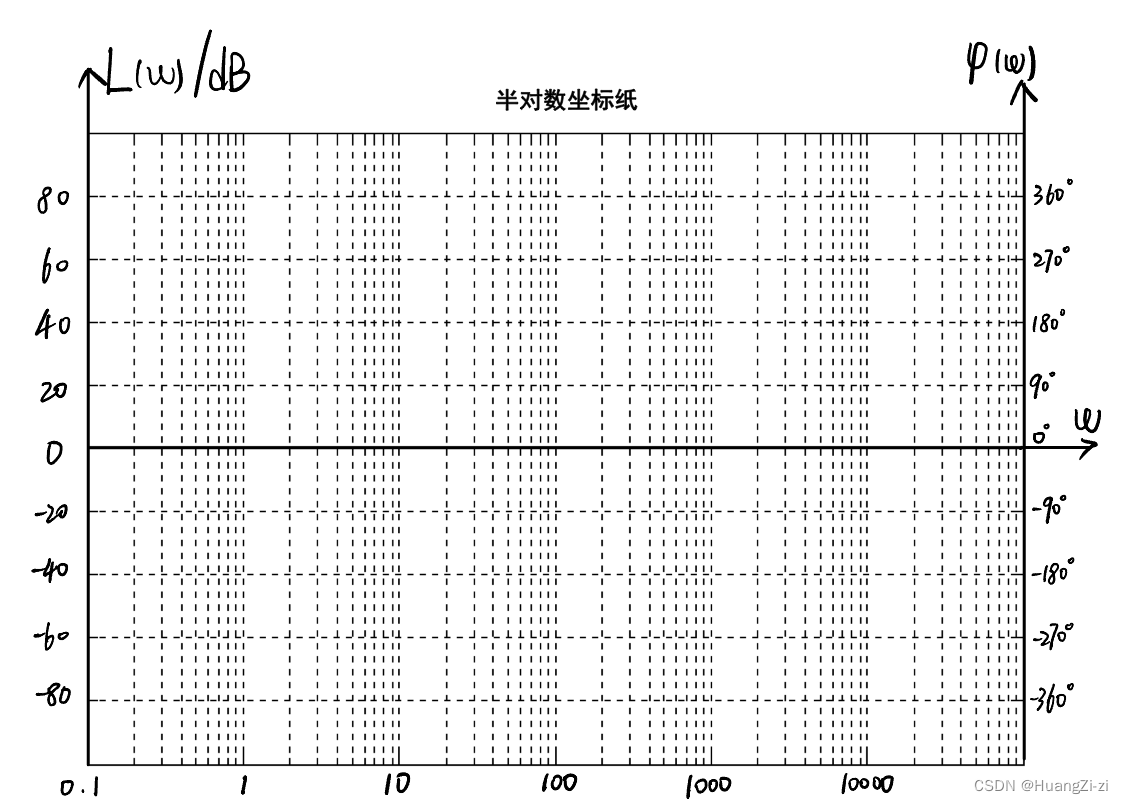
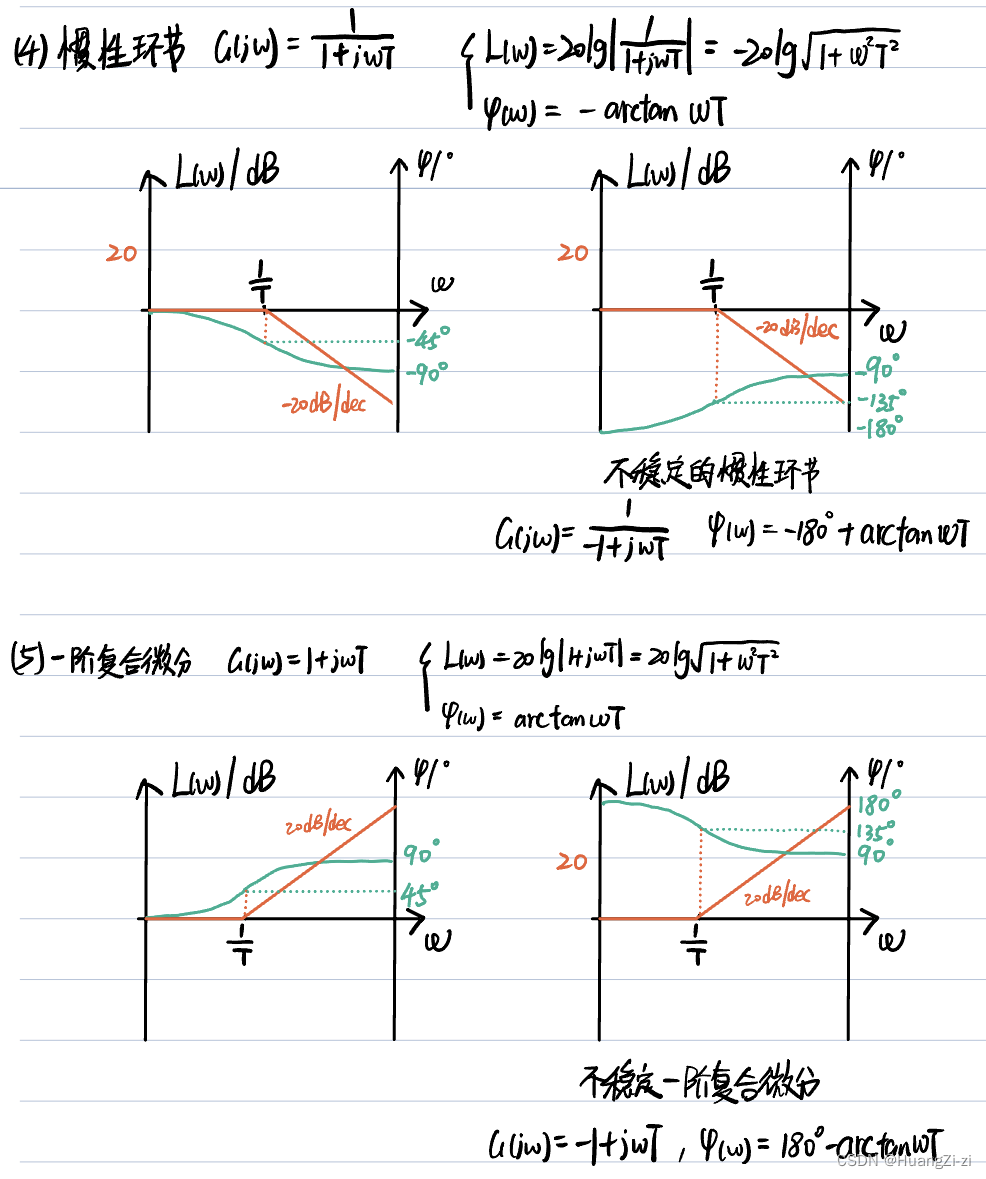 惯性环节和一阶复合微分环节的特征是
±
20
d
B
/
d
e
c
\pm20dB/dec
±20dB/dec
惯性环节和一阶复合微分环节的特征是
±
20
d
B
/
d
e
c
\pm20dB/dec
±20dB/dec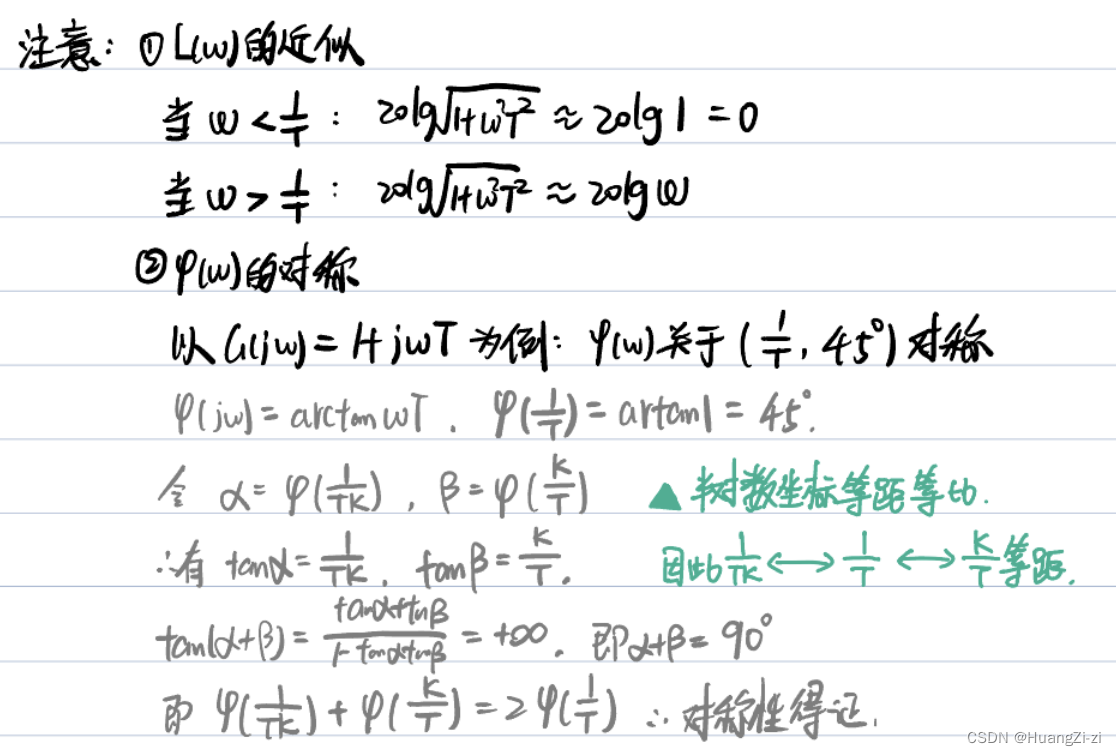 这里的
L
(
ω
)
L(\omega)
L(ω)曲线都是画的直线,是经过了近似处理,为研究方便的。
φ
(
ω
)
\varphi(\omega)
φ(ω)曲线全部都是中心对称的,这里只证明了一个。画的时候可以根据对称性更轻松画出。
这里的
L
(
ω
)
L(\omega)
L(ω)曲线都是画的直线,是经过了近似处理,为研究方便的。
φ
(
ω
)
\varphi(\omega)
φ(ω)曲线全部都是中心对称的,这里只证明了一个。画的时候可以根据对称性更轻松画出。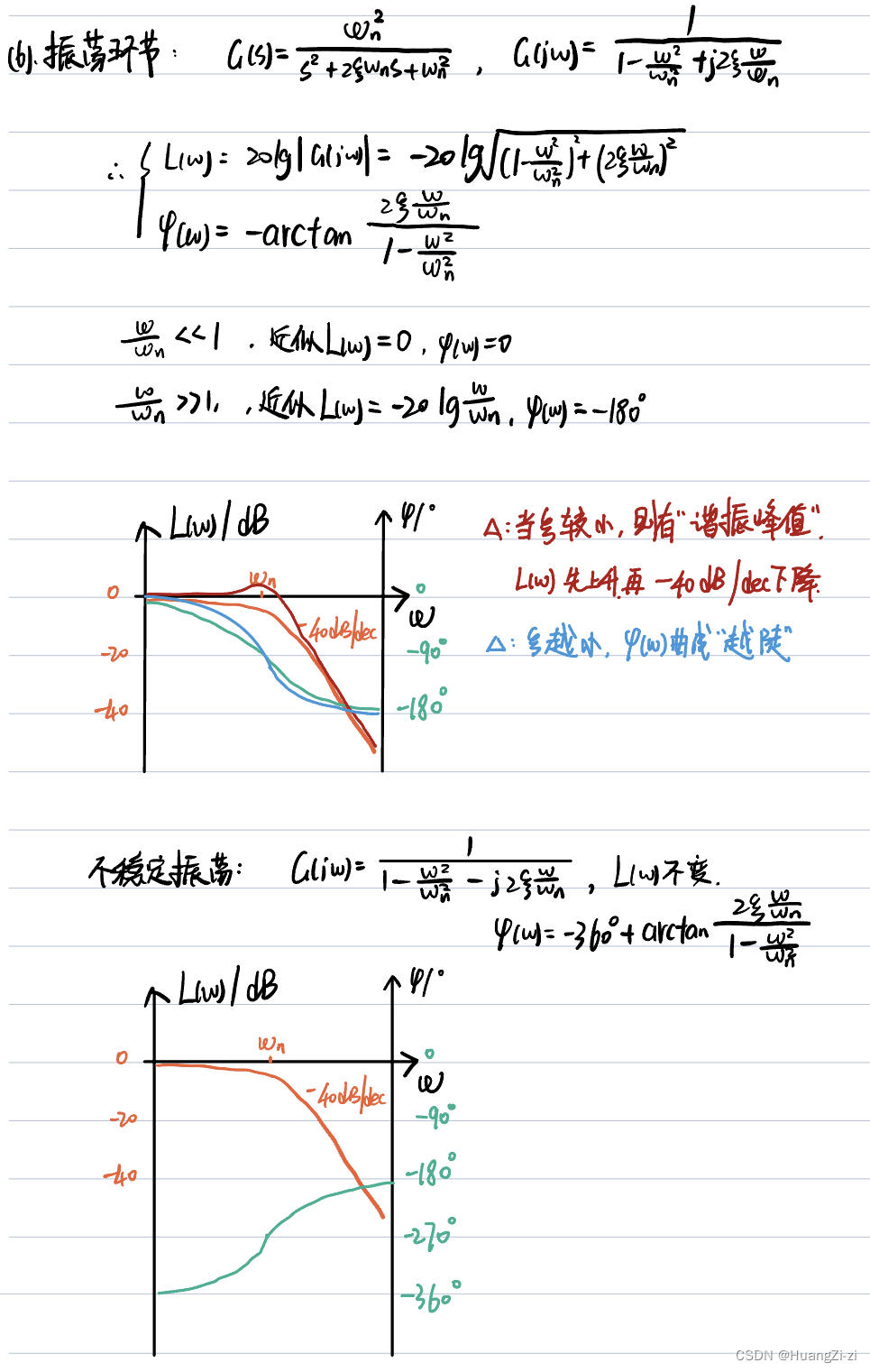
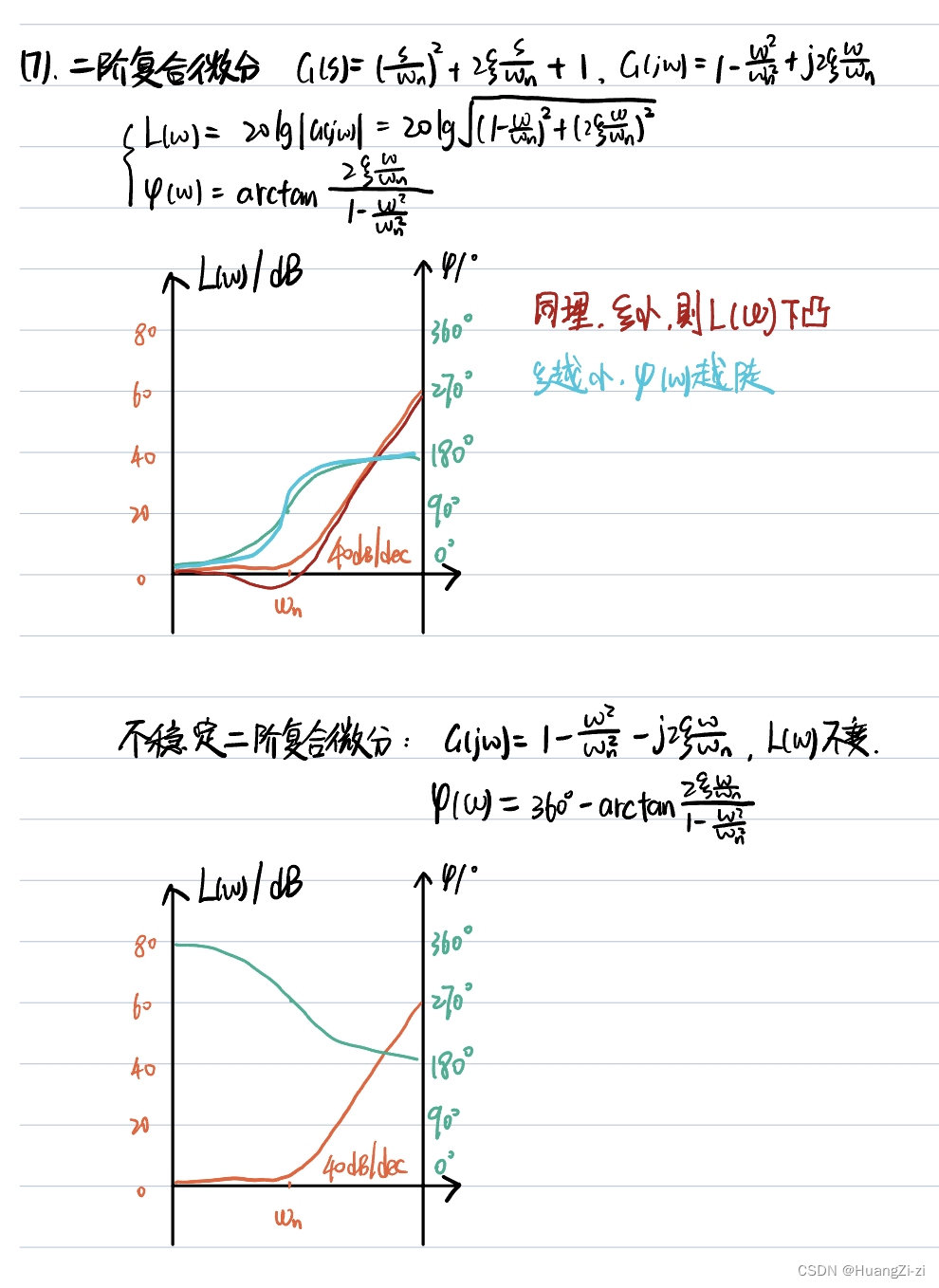 震荡环节和二阶复合微分环节的特征是
±
40
d
B
/
d
e
c
\pm40dB/dec
±40dB/dec
震荡环节和二阶复合微分环节的特征是
±
40
d
B
/
d
e
c
\pm40dB/dec
±40dB/dec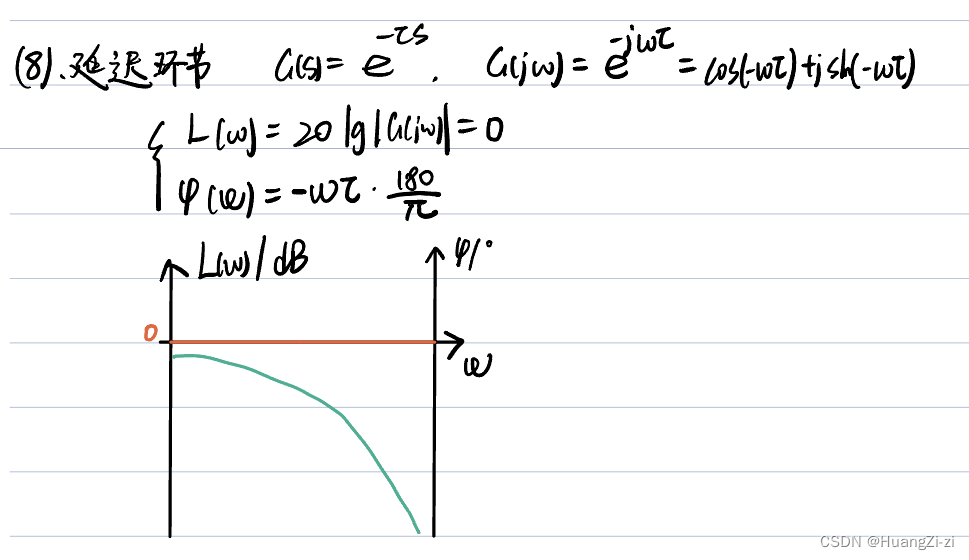
 概念有这么几个,了解即可。
概念有这么几个,了解即可。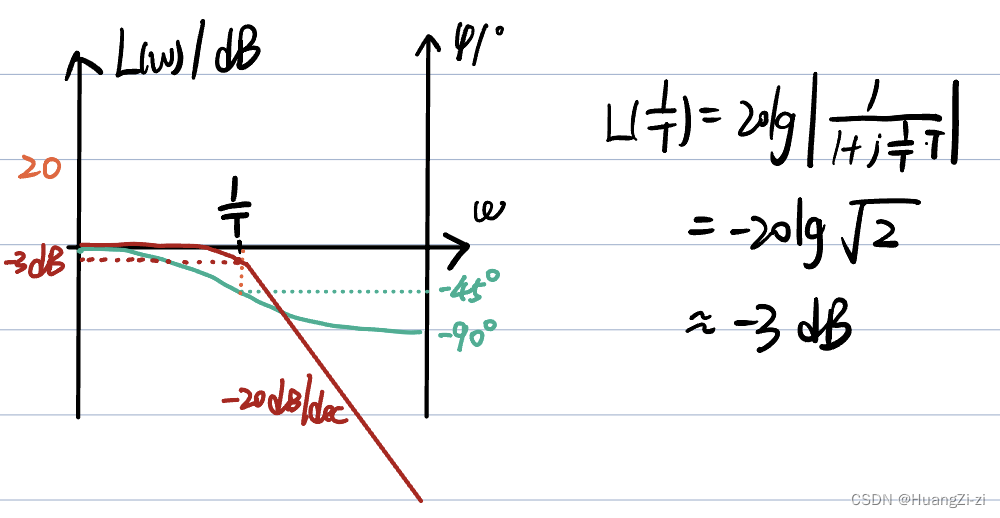
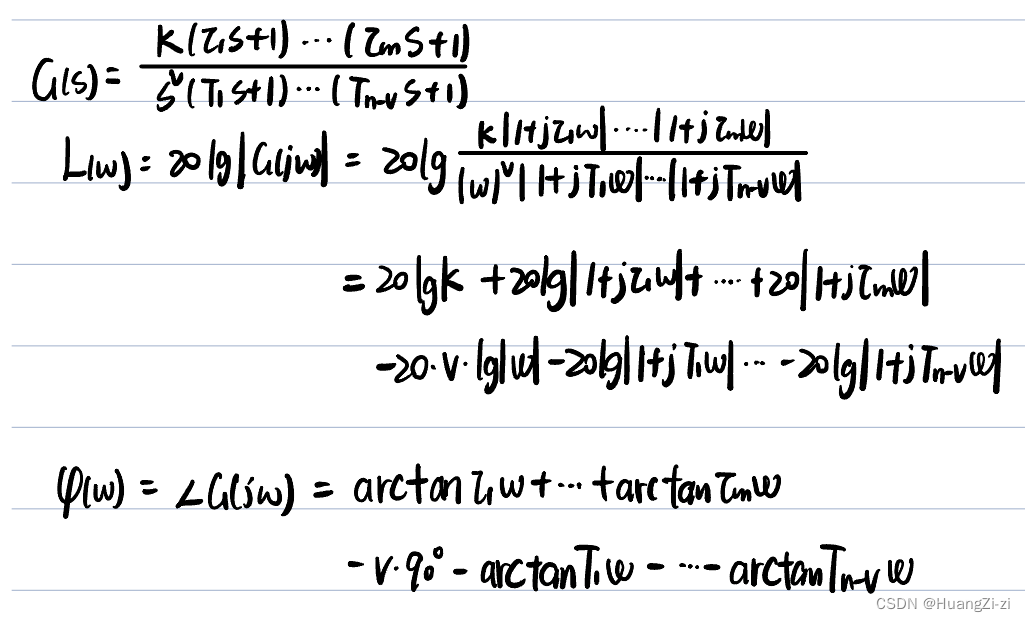 在这里可以发现,绘制开环对数频率特性的时候,无论是对数幅值还是相角,都符合线性定理,可以根据多个典型环节叠加而来。
在这里可以发现,绘制开环对数频率特性的时候,无论是对数幅值还是相角,都符合线性定理,可以根据多个典型环节叠加而来。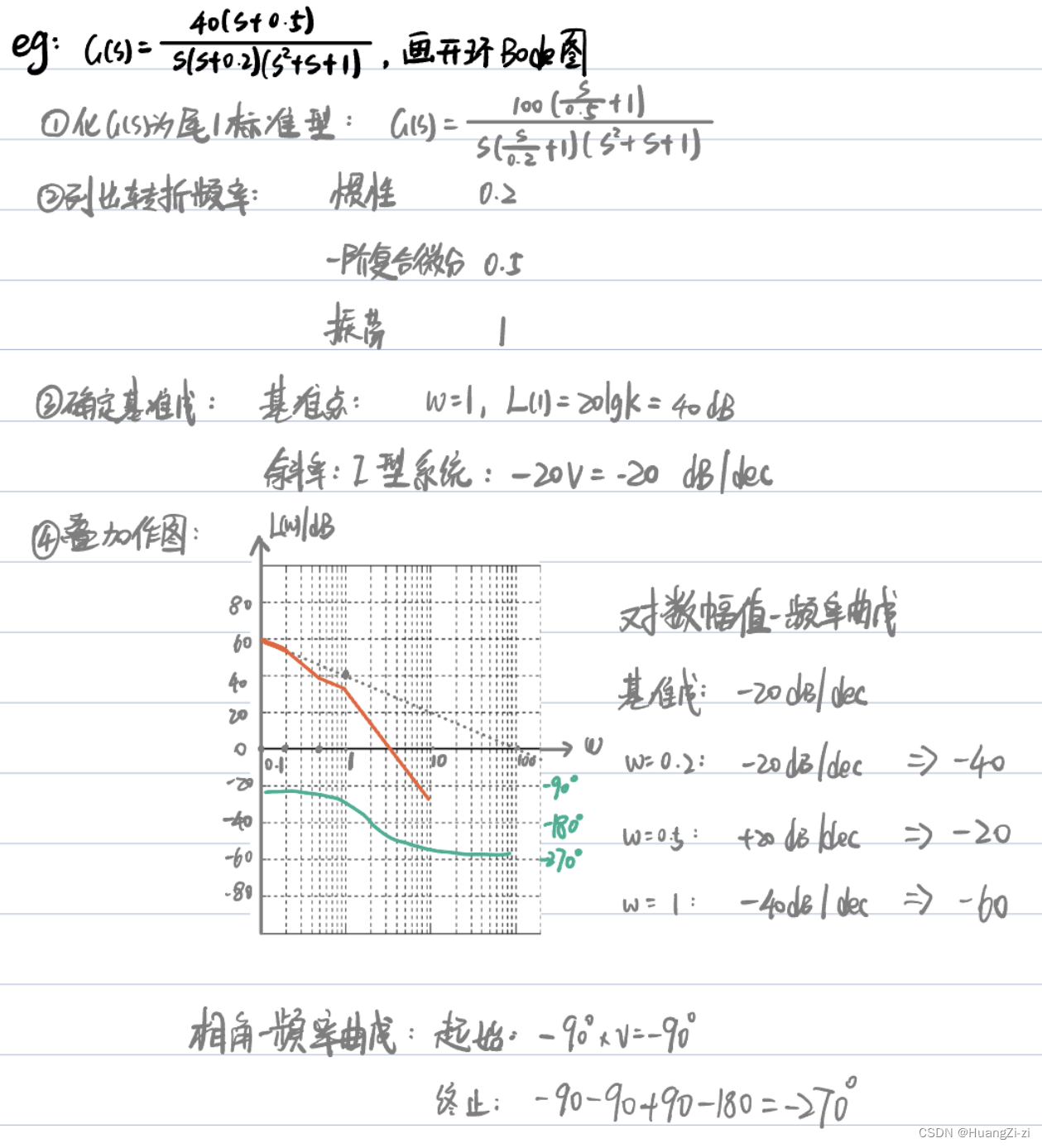 关于相角频率特性,这里只是大致勾勒一下。开环的相角频率特性同样是多个典型环节特性的叠加。 实在严谨的做图中,需要使用圆规测距描点,再连接成曲线。但因为工程实践不太看这个曲线,所以多做题根据手感勾一条一般问题不大。
关于相角频率特性,这里只是大致勾勒一下。开环的相角频率特性同样是多个典型环节特性的叠加。 实在严谨的做图中,需要使用圆规测距描点,再连接成曲线。但因为工程实践不太看这个曲线,所以多做题根据手感勾一条一般问题不大。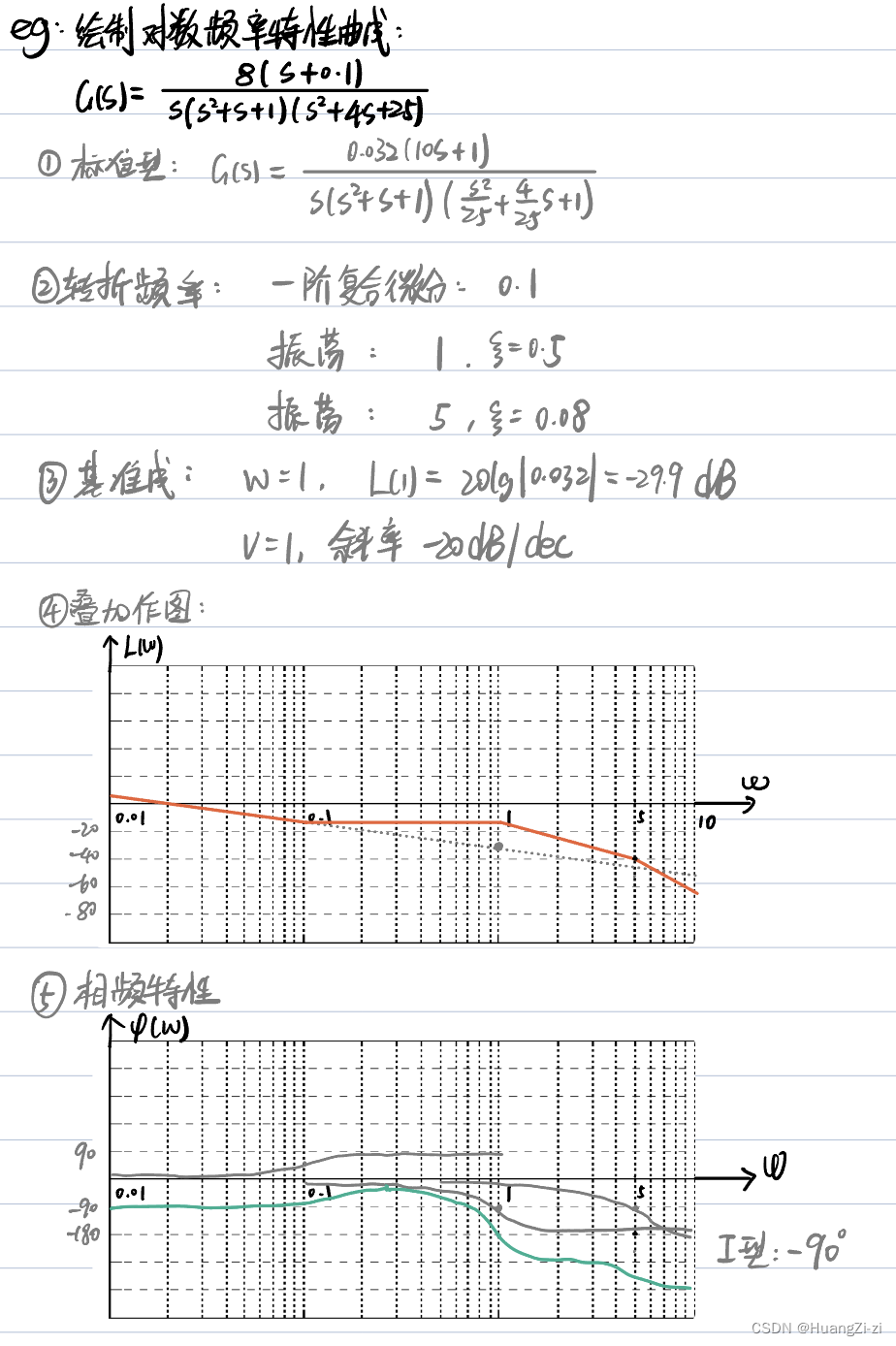
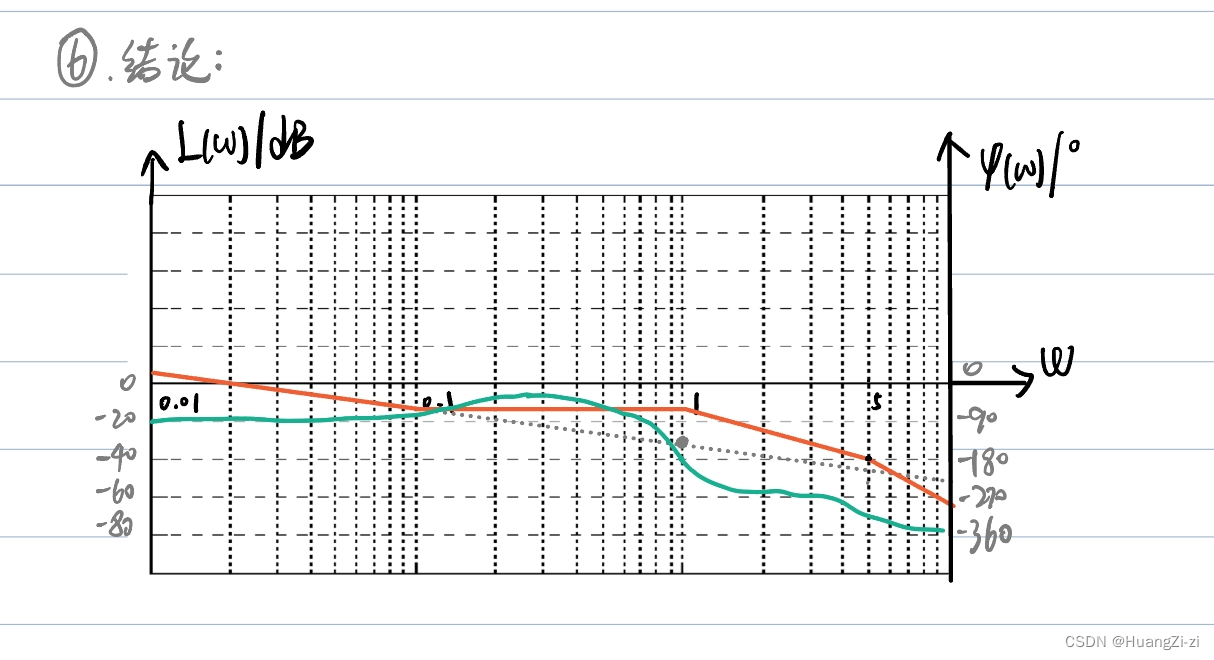
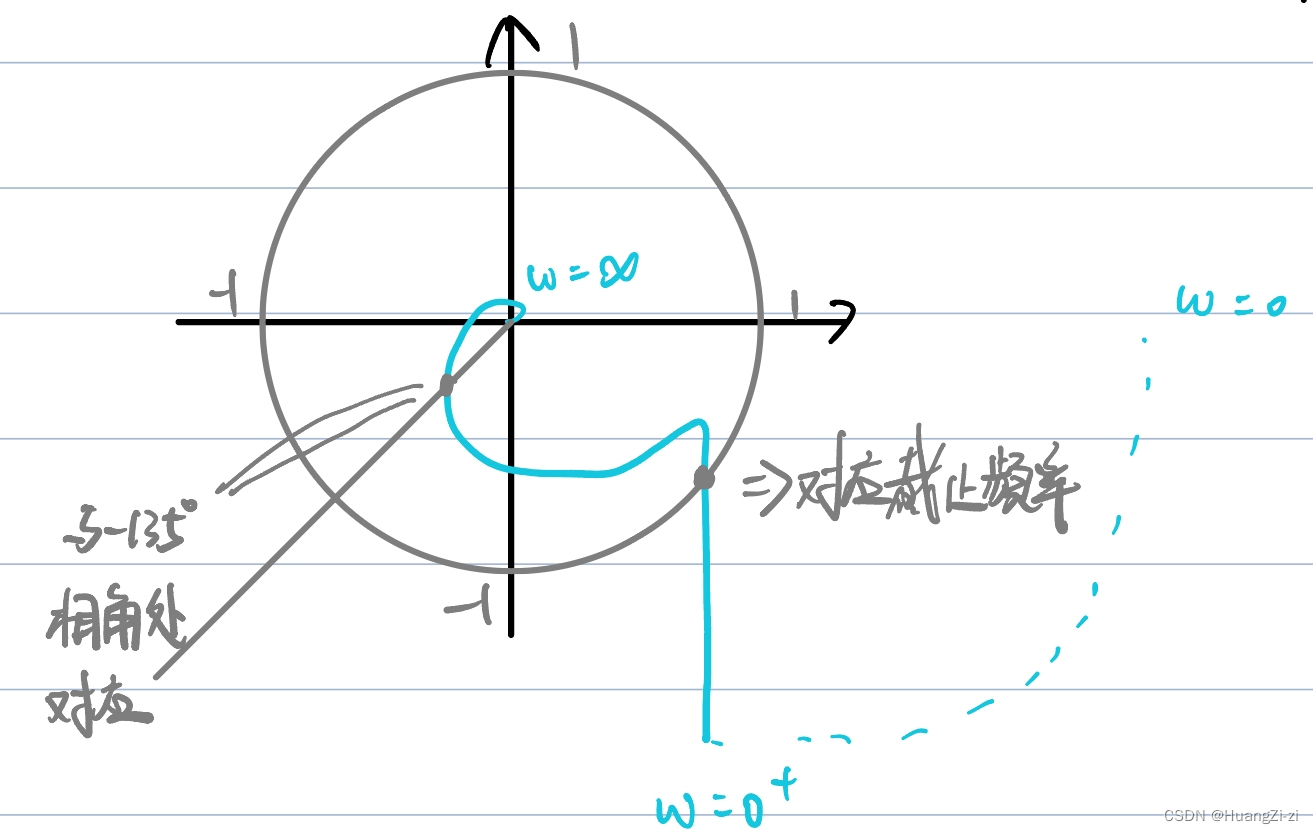 先看幅值,Bode图的一个幅值,对应Nyquist图上的一个圆,根据圆与曲线的交点就可以找出两图中对应的点。 再看相角,Bode图的一个相角,对应Nyquist图上的一条射线,同理可以找出两图对应的点。
先看幅值,Bode图的一个幅值,对应Nyquist图上的一个圆,根据圆与曲线的交点就可以找出两图中对应的点。 再看相角,Bode图的一个相角,对应Nyquist图上的一条射线,同理可以找出两图对应的点。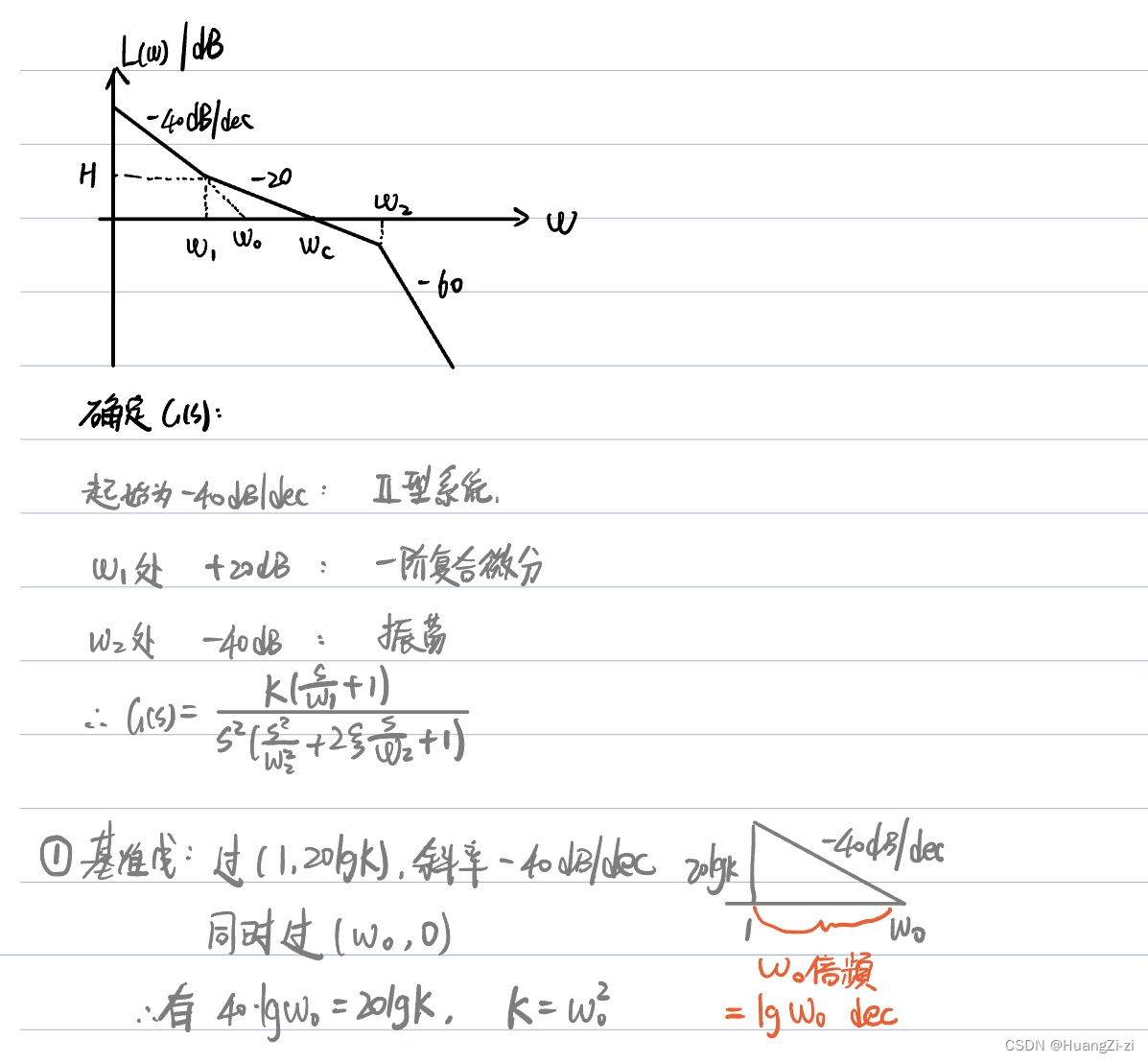 通过转折点、斜率可以知道系统的构型。本题全是直线,
ξ
\xi
ξ是不可求的,因此要求的参数只有一个K。 除了这种方法,这道题还有很多别的方法
通过转折点、斜率可以知道系统的构型。本题全是直线,
ξ
\xi
ξ是不可求的,因此要求的参数只有一个K。 除了这种方法,这道题还有很多别的方法 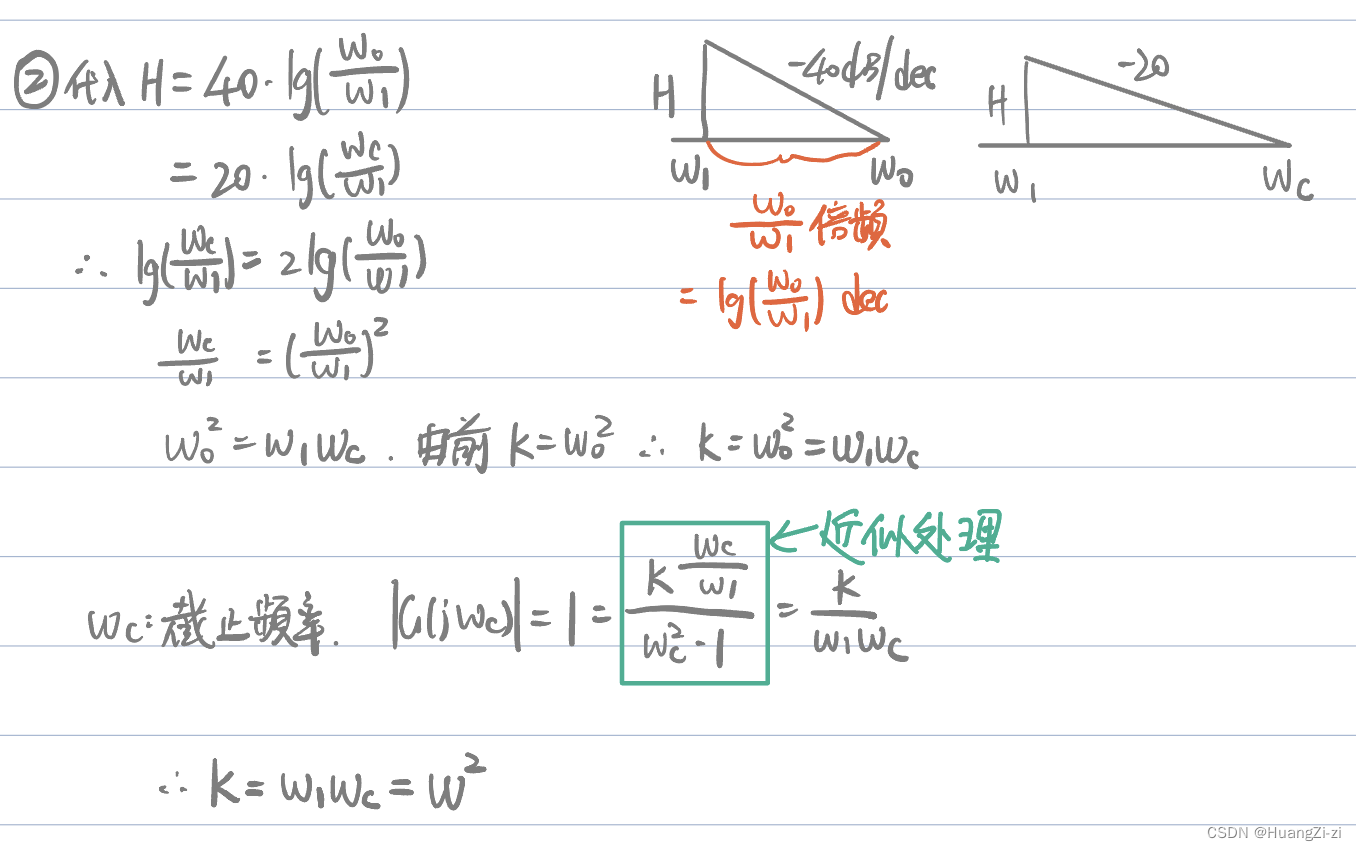 这里绿色框的近似处理,跟前面讲典型环节时的近似处理是一样的意思,如果代入
ω
\omega
ω后s项大于1,把1舍去;反之,把s项舍去。
这里绿色框的近似处理,跟前面讲典型环节时的近似处理是一样的意思,如果代入
ω
\omega
ω后s项大于1,把1舍去;反之,把s项舍去。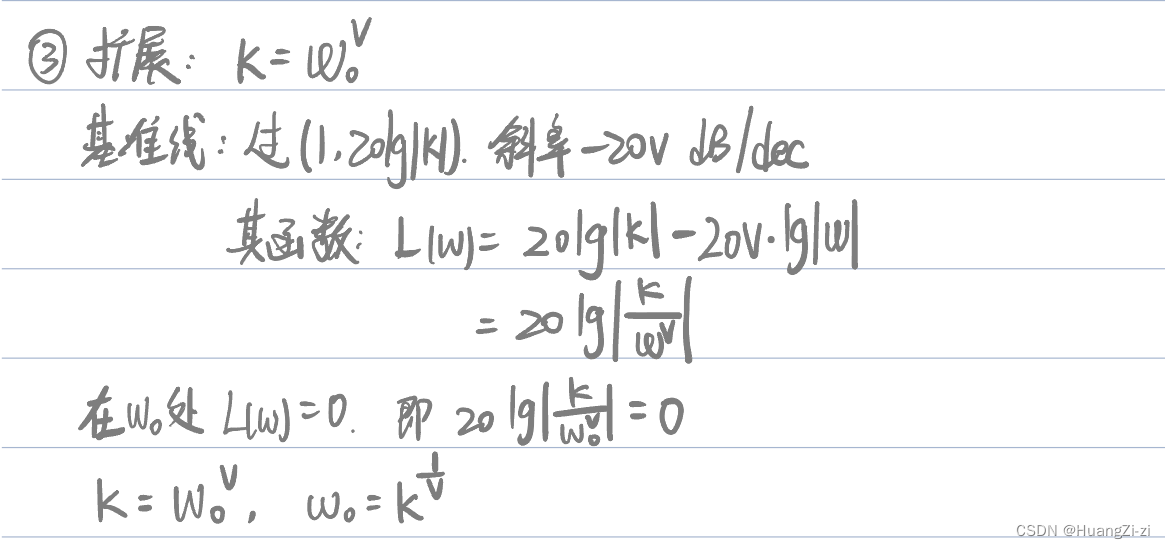 首先是基准线的函数关系式:
L
(
ω
)
=
20
l
g
∣
K
ω
v
∣
L(\omega)=20lg|\frac{K}{\omega^v}|
L(ω)=20lg∣ωvK∣ 由此可以得出,已知基准线与横轴交点座标
ω
0
\omega_0
ω0时:
K
=
ω
0
v
,
ω
o
=
K
1
v
K=\omega_0^v,\omega_o=K^{\frac{1}{v}}
K=ω0v,ωo=Kv1
首先是基准线的函数关系式:
L
(
ω
)
=
20
l
g
∣
K
ω
v
∣
L(\omega)=20lg|\frac{K}{\omega^v}|
L(ω)=20lg∣ωvK∣ 由此可以得出,已知基准线与横轴交点座标
ω
0
\omega_0
ω0时:
K
=
ω
0
v
,
ω
o
=
K
1
v
K=\omega_0^v,\omega_o=K^{\frac{1}{v}}
K=ω0v,ωo=Kv1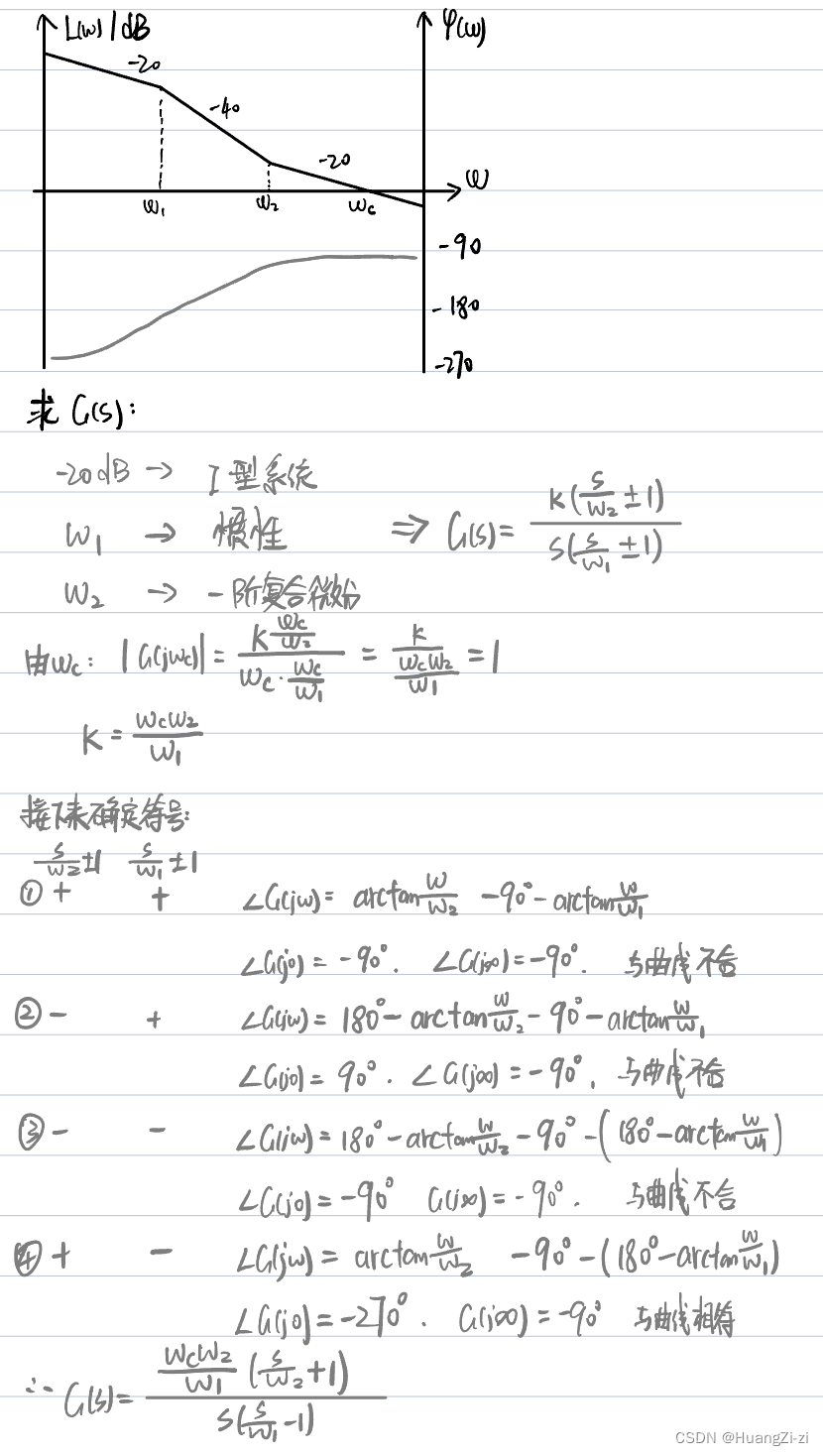 「这里是用了代数的方法去计算相角,做题的时候也可以画零点极点分布图来帮助确定相角。」
「这里是用了代数的方法去计算相角,做题的时候也可以画零点极点分布图来帮助确定相角。」【本文地址】