| 【相机标定】传统相机标定技术 | 您所在的位置:网站首页 › shah什么意思 › 【相机标定】传统相机标定技术 |
【相机标定】传统相机标定技术
|
Tsai两步标定法
Tsai说:在对摄像机进行标定时如果考虑过多的非线性畸变会引入过多的非线性参数,这样往往不仅不能提高标定精度,反而会引起解的不稳定,与线性模型标定类似,只是正交了,理想成像平面到实际成像平面之间的转换。因此,Tsai两步标定法只考虑了径向畸变,也是大多数情况下会存在的畸变类型。 Tsai存在的弊端: 无法通过一个平面标定全部的外参数,涉及非线性运算可能使得结果不稳定。 两步: 第一步利用最小二乘法解超定线性方程组,给出外部参数,求得的参数为:r1-r9,sx,tx,ty 第二步求解内部参数,如果摄像机无透镜畸变,可一个超定线性方程解出,如果存在径向畸变,则通过一个三变量的优化搜索求解,求得参数为:有效焦距f, T中的tz和透镜畸变系数k 存在径向畸变的坐标系之间的关系: |
 Pu:理想成像点,pd:实际成像点,畸变没有导致方向发生改变
Pu:理想成像点,pd:实际成像点,畸变没有导致方向发生改变  由像素坐标系和世界坐标系之间的关系,添加畸变系数后得到如下公式,其中,(xc,yc,zc)为某物在摄像机坐标系下的坐标,(xw,yw,zw)为某物在世界坐标系下的坐标。将前面所述的矩阵关系写成方程 的形式:
由像素坐标系和世界坐标系之间的关系,添加畸变系数后得到如下公式,其中,(xc,yc,zc)为某物在摄像机坐标系下的坐标,(xw,yw,zw)为某物在世界坐标系下的坐标。将前面所述的矩阵关系写成方程 的形式: 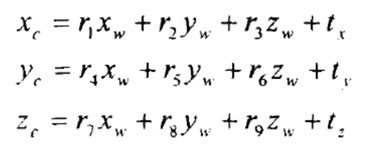 由于方向一致,及方向平行:
由于方向一致,及方向平行:  整理得:
整理得:  将标定板设置为Z平面,可选取世界坐标系z=0(则含有zw项为零)
将标定板设置为Z平面,可选取世界坐标系z=0(则含有zw项为零) 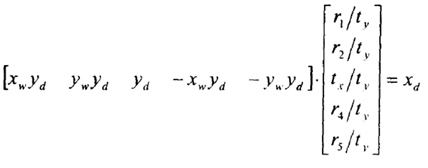 对于一张图像中的N个点进行计算,上式可以修改如下:
对于一张图像中的N个点进行计算,上式可以修改如下:  此时,求得r1,r2,tx,r4,r5 利用R(旋转矩阵)的正交性,求得ty,r1—r9 此时求得了相机模型的外部参数 第二步:求解内部参数 设置畸变系数K=0为初始值,暂时不考虑K得到超定方程组。
此时,求得r1,r2,tx,r4,r5 利用R(旋转矩阵)的正交性,求得ty,r1—r9 此时求得了相机模型的外部参数 第二步:求解内部参数 设置畸变系数K=0为初始值,暂时不考虑K得到超定方程组。 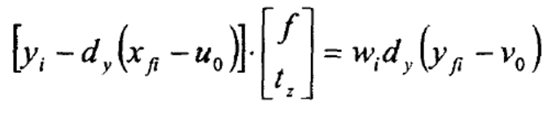
 求得f和tz,作为初始值,使用优化算法进行迭代更新,得到更精确的相机参数k,f,tz,比如最小二乘法。
求得f和tz,作为初始值,使用优化算法进行迭代更新,得到更精确的相机参数k,f,tz,比如最小二乘法。【本文地址】
公司简介
联系我们