| 基于 ROS 使用 Gazebo 物理仿真机器人【机器人仿真入门教程四】 | 您所在的位置:网站首页 › rosgazebo仿真 › 基于 ROS 使用 Gazebo 物理仿真机器人【机器人仿真入门教程四】 |
基于 ROS 使用 Gazebo 物理仿真机器人【机器人仿真入门教程四】
|
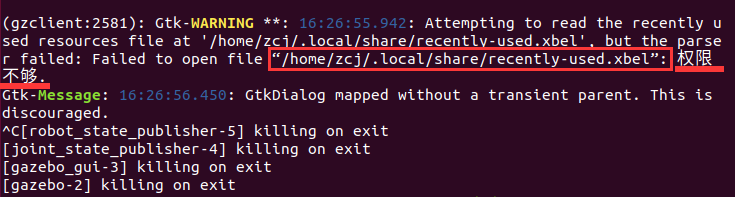
小插曲:如果出现 gazebo 在保存文件时无反应,后台显示无权限打开某某某文件时,找到这个文件。 |
 可以很明显看到这个文件只能 root 打开,权限被更改了,然后需要更改它的访问权限。
可以很明显看到这个文件只能 root 打开,权限被更改了,然后需要更改它的访问权限。 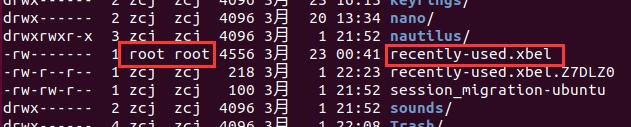 使用命令:sudo chown zcj:zcj recently-used.xbel,第一个 zcj 是用户,第二个 zcj 是用户组,后面跟文件名。
使用命令:sudo chown zcj:zcj recently-used.xbel,第一个 zcj 是用户,第二个 zcj 是用户组,后面跟文件名。 
 上面还有一个错误:
上面还有一个错误:  我建议,重新配置 ROS 和工作空间吧,我百度了好久都没用结果,没辙。
我建议,重新配置 ROS 和工作空间吧,我百度了好久都没用结果,没辙。【本文地址】
公司简介
联系我们
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |
| 基于 ROS 使用 Gazebo 物理仿真机器人【机器人仿真入门教程四】 | 您所在的位置:网站首页 › rosgazebo仿真 › 基于 ROS 使用 Gazebo 物理仿真机器人【机器人仿真入门教程四】 |
|
小插曲:如果出现 gazebo 在保存文件时无反应,后台显示无权限打开某某某文件时,找到这个文件。 |
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |
| CopyRight 2018-2019 实验室设备网 版权所有 |