| D455相机RGB与深度图像对齐,缓解相机无效区域的问题 | 您所在的位置:网站首页 › rgb和深度图对齐原理 › D455相机RGB与深度图像对齐,缓解相机无效区域的问题 |
D455相机RGB与深度图像对齐,缓解相机无效区域的问题
|
前言
上一次我们介绍了深度相机D455的使用:intel深度相机D455的使用-CSDN博客,我们也看到了相机检测到的无效区域。 
在使用Intel深度相机D455时,我们经常会遇到深度图中的无效区域。这些无效区域可能由于黑色物体、光滑表面、透明物体以及视差效应等原因引起。为了解决这些问题,我们可以采用图像修复与滤波结合的方法。具体步骤包括创建掩模图、使用插值方法填补缺失值,以及利用OpenCV的inpaint函数进行修复。本文详细介绍了如何根据不同的对齐方式(深度对齐到彩色或彩色对齐到深度)来处理无效区域,并展示了图像修复的实际代码和效果。这些方法能有效提升深度图质量,特别适用于深度加雾任务。 请注意本文中图像修复与滤波结合的方法处理无效区域的部分,仅仅只适用于我的需求,即根据深度图进行深度加雾的任务。 深度相机的缺点 D455原理双目立体视觉系统通过视差计算来获得深度信息。相机系统捕捉到的两幅红外图像会有一个视差,即相同物体在两幅图像中的位置差异。通过视差计算,可以推算出物体到相机的距离(深度)。 缺点 黑色物体的影响黑色物体对光线的反射率非常低,意味着它们吸收大部分入射光线,而不是反射回去。对于依赖反射光线来计算深度的双目立体视觉系统,这会导致反射信号不足,从而影响深度计算的精度和可靠性。并且黑色物体通常与背景之间的对比度较低,这使得双目相机难以在图像中识别和匹配这些物体的特征点,从而影响视差计算。 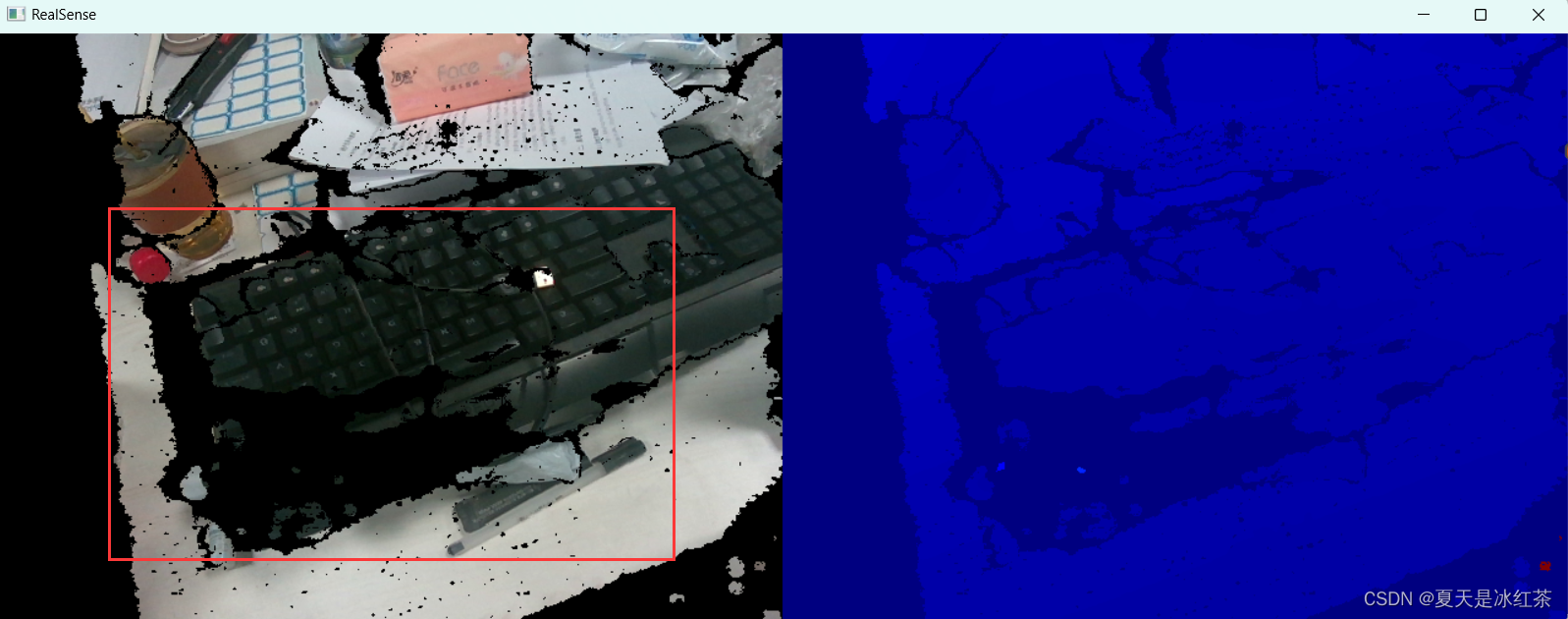 光滑物体表面反射的影响
光滑物体表面反射的影响
光滑表面会产生镜面反射,这意味着光线会按照入射角以相同的角度反射出去。这种反射模式不同于漫反射,深度相机会因为接收到的光线方向不一致而无法准确计算深度信息。 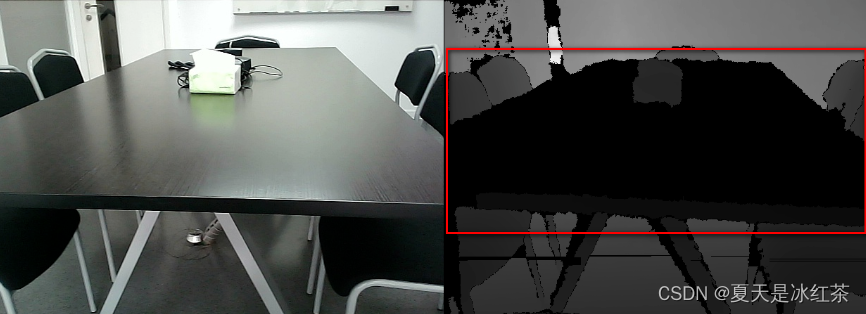
图源:深度相机的坑_结构光相机深度信息缺失-CSDN博客 透明物体透射的影响玻璃等透明物体对基于结构光的深度相机造成的问题尤其明显。因为这些相机依赖红外光的反射来测量深度,当光线穿过或在玻璃表面反射时,会导致深度信息不准确或完全丢失。这种情况会导致深度图像中出现大量的零值或无效值。 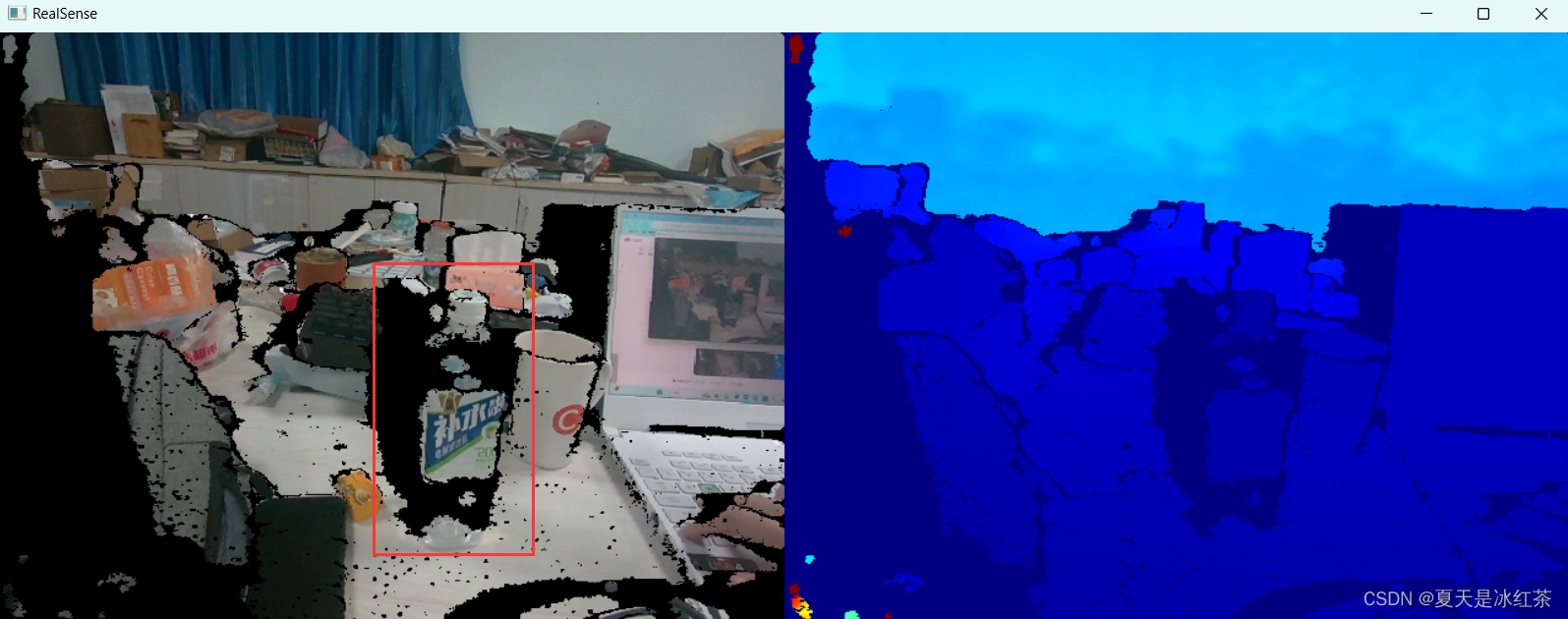 视差的影响
视差的影响
在物体边缘或细小结构上,视差效应会导致深度信息的不连续和噪声。由于深度相机的发射端和接收端之间存在间距,物体边缘会有视觉盲区。远处物体边缘受影响较小,但近距离物体边缘会显著受影响,产生无效深度值的阴影区域,导致深度图在这些区域中缺失和不准确。 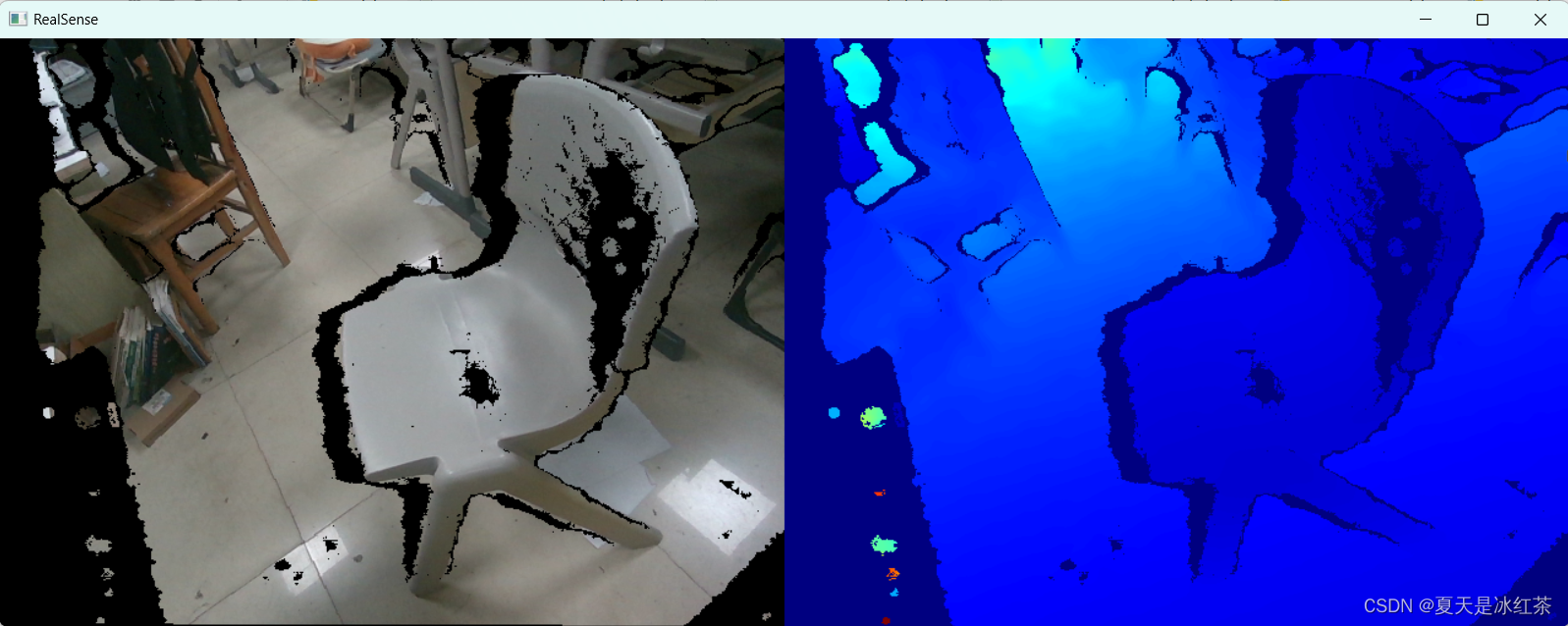 RGB与深度图像对齐
RGB与深度图像对齐
深度对齐到彩色(ALIGN_WAY = 1): 这种方式通常用于彩色图像具有更高分辨率或更高精度的情况,将深度图像的像素对齐到彩色图像的像素上,便于在彩色图像中进行对象检测或其他处理。 彩色对齐到深度(ALIGN_WAY = 0): 这种方式通常用于深度图像的分辨率更高的情况,将彩色图像的像素对齐到深度图像的像素上,便于在深度图像中进行精确的距离测量。 python 复制代码 import pyrealsense2 as rs import os import cv2 import numpy as np from Depth_camera.utils import get_depth_camera_info, create_camera_save_path saved_count = 0 extend_num = 3 width = 640 height = 480 fps = 30 # 0:彩色图像对齐到深度图; # 1:深度图对齐到彩色图像 ALIGN_WAY = 1 color_path, depth_path = create_camera_save_path() pipeline = rs.pipeline() config = rs.config() config.enable_stream(rs.stream.depth, width, height, rs.format.z16, fps) config.enable_stream(rs.stream.color, width, height, rs.format.bgr8, fps) profile = pipeline.start(config) get_depth_camera_info(profile) # 设置对齐方式 align_to = rs.stream.color if ALIGN_WAY == 1 else rs.stream.depth align = rs.align(align_to) color_image2 = None try: while True: frames = pipeline.wait_for_frames() # 对齐图像 aligned_frames = align.process(frames) depth_frame = aligned_frames.get_depth_frame() color_frame = aligned_frames.get_color_frame() depth_image = np.asanyarray(depth_frame.get_data()) if ALIGN_WAY == 0: color_frame2 = frames.get_color_frame() color_image2 = np.asanyarray(color_frame2.get_data()) cv2.imshow("color_image2", color_image2) color_image = np.asanyarray(color_frame.get_data()) # 获取深度信息,以米为单位 depth_scale = profile.get_device().first_depth_sensor().get_depth_scale() depth_image_in_meters = depth_image * depth_scale depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.03), cv2.COLORMAP_JET) images = np.hstack((color_image, depth_colormap)) cv2.namedWindow('RealSense', cv2.WINDOW_AUTOSIZE) cv2.imshow('RealSense', images) cv2.imshow("depth_image_in_meters", depth_image_in_meters) key = cv2.waitKey(1) if key & 0xFF == ord('s'): saved_count += 1 print(f"{saved_count} 已保存图像至 {color_path} 和 {depth_path}") if color_image2 is None: cv2.imwrite(os.path.join(color_path, "{}.png".format(saved_count)), color_image) else: cv2.imwrite(os.path.join(color_path, "{}.png".format(saved_count)), color_image2) # 深度信息保存为 .npy 格式,单位为米 np.save(os.path.join(depth_path, "{}.npy".format(saved_count)), depth_image_in_meters) elif key & 0xFF == ord('q') or key == 27: cv2.destroyAllWindows() break finally: pipeline.stop()当ALIGN_WAY = 1 的效果: 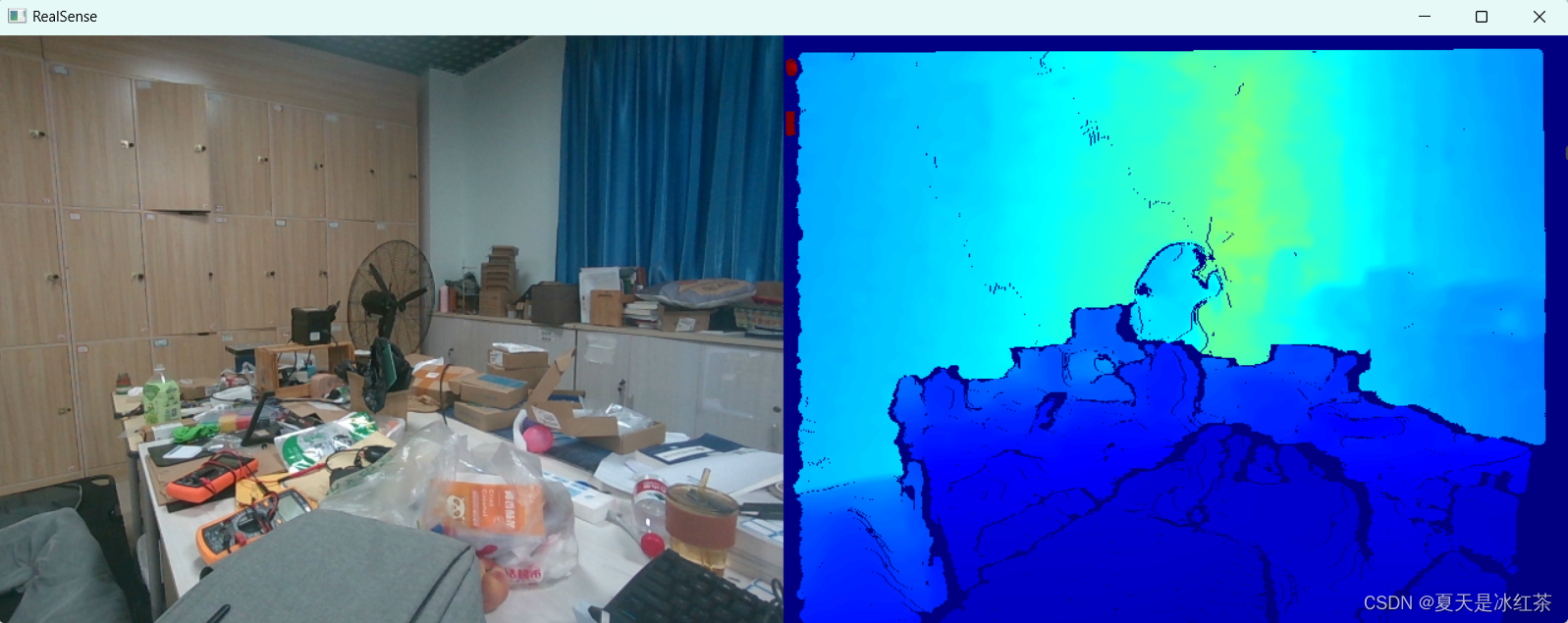
当ALIGN_WAY = 0 的效果: 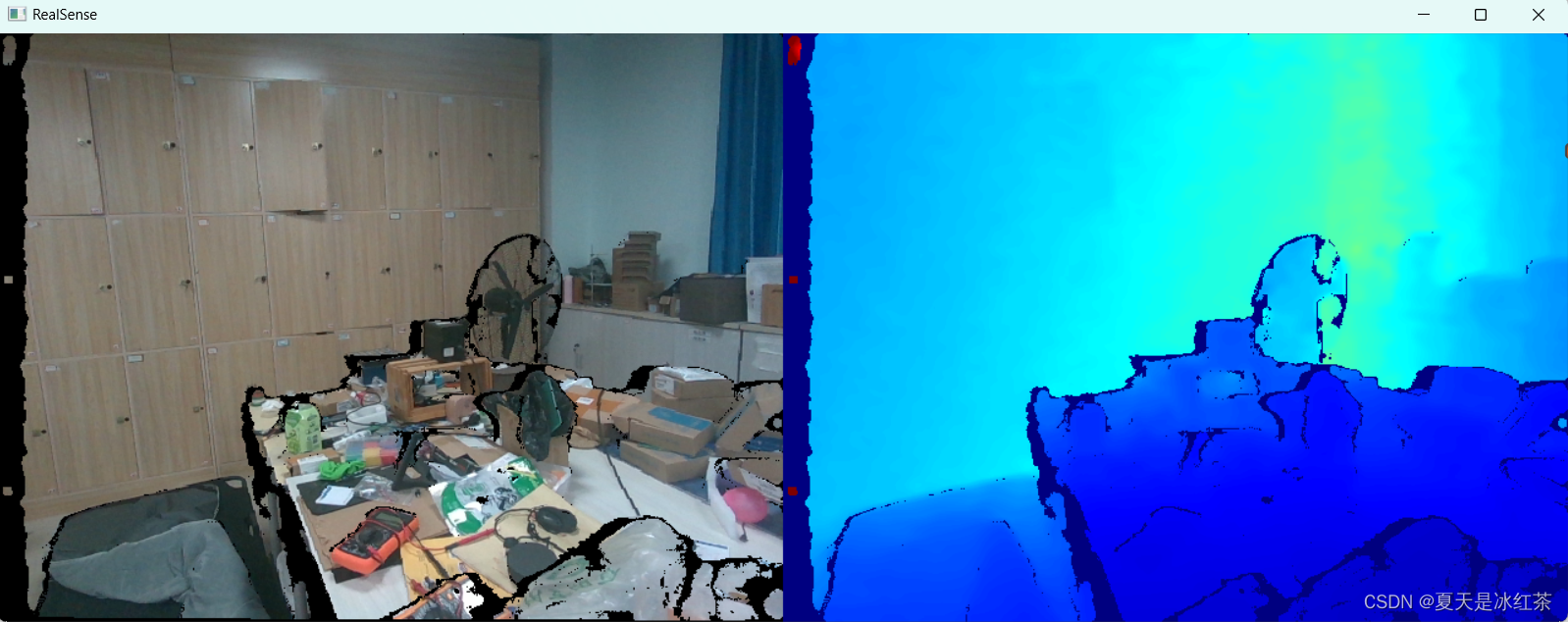
这样拍摄的图片能缓解无效区域。 图像修复与滤波结合处理无效区域采用图像修复来处理深度图像中的缺失值(深度值为0的像素)。具体而言,按照以下步骤: 创建一个掩模图,将深度图像中值为0的像素标记为需要修补的区域。 将深度图像中的值为0的像素替换为NaN,这样做是为了在后续处理中标记需要填充的区域。 使用最近邻插值方法填充NaN值,将其替换为周围已知深度值的平均值。 使用OpenCV中的cv2.inpaint函数进行修补,根据掩模图进行修复。 python 复制代码 import cv2 import numpy as np import os def inpaint_depth_image(depth_image, inpaintRadius=3): mask = (depth_image == 0).astype(np.uint8) depth_image_fixed = np.where(depth_image == 0, np.nan, depth_image) nan_mask = np.isnan(depth_image_fixed) depth_image_fixed[nan_mask] = np.interp(np.flatnonzero(nan_mask), np.flatnonzero(~nan_mask), depth_image_fixed[~nan_mask]) inpainted_depth_image = cv2.inpaint(depth_image_fixed.astype(np.float32), mask, inpaintRadius=inpaintRadius, flags=cv2.INPAINT_TELEA) return inpainted_depth_image def read_one_npy(path): depth_image = np.load(path) print(depth_image.shape) x = 1 y = 1 # 修补深度图像 inpainted_depth_image = inpaint_depth_image(depth_image) print(np.unique(inpainted_depth_image)) inpainted_depth_image = np.where(inpainted_depth_image |
【本文地址】