| 树莓派 Pico 网络透传扩展板使用教程 | 您所在的位置:网站首页 › python串口控制 › 树莓派 Pico 网络透传扩展板使用教程 |
树莓派 Pico 网络透传扩展板使用教程
|
说明
资料
售后
产品概述 提供Pico C语言例程跟Python例程 产品参数参数名称参数供电电压5V工作电流140mA工作模式TCP/UDP串口波特率300bps ~ 921600bps串口 TTL 电平兼容 3.3V 和 5V工作温度-40℃~85℃产品尺寸74.54 x21.00(mm)接口说明
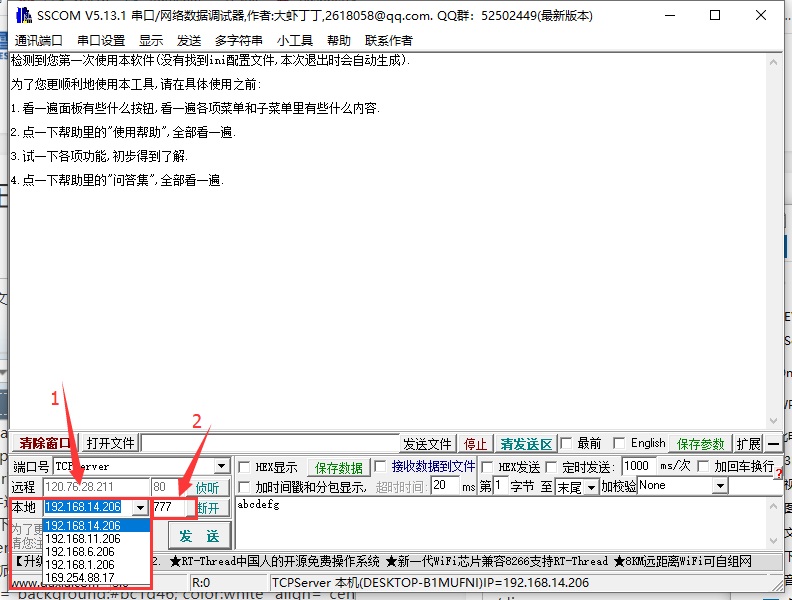
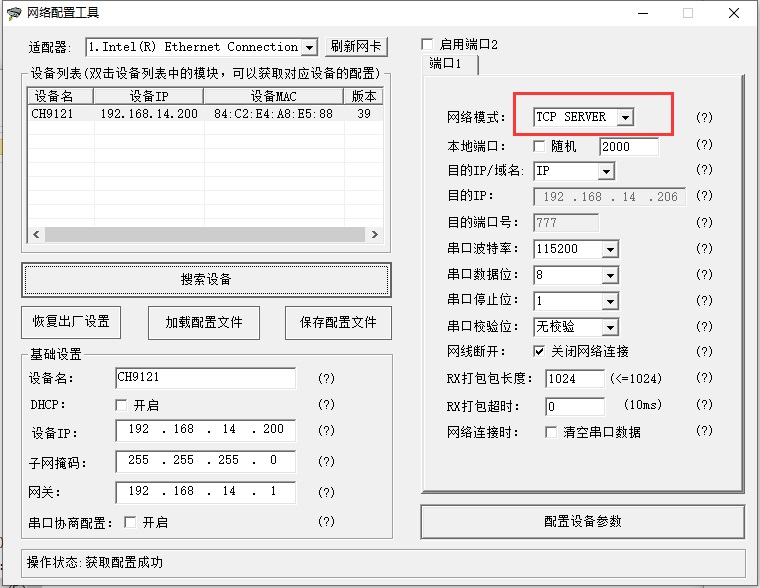
CH9121 为网络串口透传芯片,可实现串口数据与网络数据的双向透明传输,支持 TCP CLEINT/SERVER,UDP CLIENT/SERVER 4 种工作模式,串口波特率支持范围为 300bps~921600bps, 使用前需通过上位机软件 NetModuleConfig.exe 或者串口命令配置芯片的网络参数和串口参数, 配置完成后,CH9121 将配置参数保存至内部存储空间,芯片复位后,CH9121 将按保存的配置值工作。 默认配置CH9121 出厂时,端口 2 默认关闭,端口 1 默认工作在 TCP CLIENT 模式,网络相关默认参数依次为:(1) 设备 IP : 192.168.1.200(2) 子网掩码 : 255.255.255.0(3) 默认网关 : 192.168.1.1(4) 模块端口 : 2000(5) 目标 IP : 192.168.1.100(6) 目标端口 : 1000串口相关默认参数依次为:(1) 波特率 : 9600(2) 超时 : 0 (3) 数据位 : 8 ; 停止位 : 1 ; 校验 :无(4) 清空串口缓冲区 : 从不清空 TCP CLIENT1、选择SSCOM选择协议类型为TCPServre,再通过SSCOM查看目标IP跟目标端口号(也就是图中的1跟2) 1、运行NetModuleConfig.exe设置模块参数,如下操作:(1).点击“搜索设备”,设备列表会显示出子网内模块;(2).双击设备列表里面的模块,在左侧修改网络模式为TCPServre,再根据需求修改模块参数,最后点击“配置设备参数”; 1、运行NetModuleConfig.exe设置模块参数,如下操作:(1).点击“搜索设备”,设备列表会显示出子网内模块;(2).双击设备列表里面的模块,在左侧修改网络模式为UDP CLIENT/Servre,再根据需求修改模块参数,最后点击“配置设备参数”;
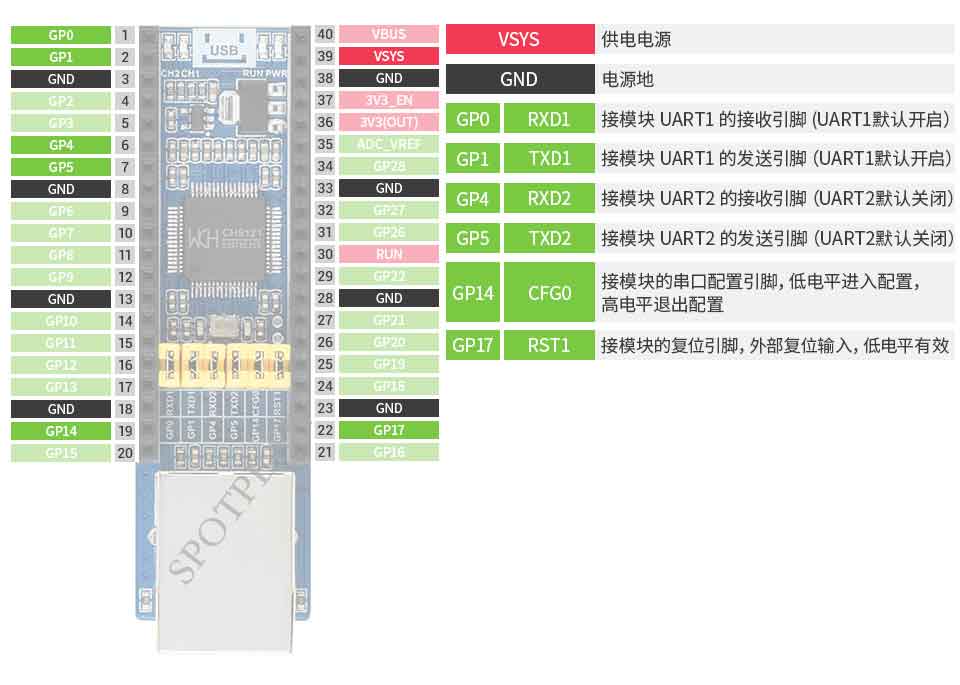
Pico使用教程 硬件连接您可以对照以下表格连线。 Pico连接引脚对应关系ETHPico功能5VVSYS电源输入GNDGND电源地RXD1GP0串行数据输入TXD1GP1串行数据输出RXD2GP4串行数据输入TXD2GP5串行数据输出CFG0GP14网络配置使能脚RST1GP17复位直连
正在整理 请参照树莓派官方网站的Pico专题:https://www.raspberrypi.org/documentation/pico/getting-started/ 程序下载打开树莓派终端,执行:从我们官网下载。 sudo apt-get install p7zip-fullcd ~sudo wget https://www.waveshare.net/w/upload/a/a4/Pico_ETH_CH9121_CODE.7z7z x Pico_ETH_CH9121_CODE.7z -o./Pico_ETH_CH9121_CODEcd ~/Pico_ETH_CH9121_CODEcd Pico/c/build/例程使用C部分以下教程为在树莓派上操作,但由于cmake的多平台、可移植的特点,在PC上也是能成功编译,但操作略有不同,需要您自行判断。进行编译,请确保在c目录: cd ~/Pico_ETH_CH9121_CODE/Pico/C/Pico_ETH_CH9121_CODE/Pico/C/Serial Port Parameter Configuration:用来通过串口配置模式。Pico_ETH_CH9121_CODE/Pico/C/RX_TX:用来进行信息收发,收到什么返回什么。进入其中一个文件夹中创建并进入build目录,并添加SDK: 其中 ../../pico-sdk 是你的SDK的目录。 我们示例程序中是有build的,直接进入即可 cd buildexport PICO_SDK_PATH=../../pico-sdk(注意:务必写对你自己的SDK所在路径)执行cmake自动生成Makefile文件 cmake ..执行make生成可执行文件,第一次编译时间比较久 make -j9编译完成,会生成uf2文件。 按住Pico板上的按键,将pico通过Micro USB线接到树莓派的USB接口,然后松开按键。接入之后,树莓派会自动识别到一个可移动盘(RPI-RP2),将build文件夹下的main.uf2 文件复制到识别的可移动盘(RPI-RP2)中即可。 cp main.uf2 /media/pi/RPI-RP2/Python部分windows环境下的使用1.按住Pico板上的BOOTSET按键,将pico通过Micro USB线接到电脑的USB接口,待电脑识别出一个可移动硬盘(RPI-RP2)后,松开按键。2.将python目录中rp2-pico-20210418-v1.15.uf2文件复制到识别的可移动盘(RPI-RP2)中3.打开Thonny IDE(注意:要使用最新版本的Thonny,否则是没有Pico的支持包的,当前Windows下的最新版本为v3.3.3)4.点击工具->设置->解释器,如图所示选择Pico及对应的端口
以确保你的版本是有Pico支持包的,同样你可以点击Tools -> Options... -> Interpreter选择MicroPython(Raspberry Pi Pico 和ttyACM0端口如图所示: 3.点击File->Open...->python/RX_TX.py,运行脚本即可 代码简析C部分通过串口配置参数(根据你的需求进行修改即可): 数据类型#define UCHAR unsigned char#define UBYTE uint8_t#define UWORD uint16_t#define UDOUBLE uint32_t模块初始化:void CH9121_init(void);本程序只进行了简单的配置,如需配置其他功能可查阅串口控制命令,自行配置即可:UCHAR CH9121_Mode //模式选择UCHAR CH9121_LOCAL_IP[4] //本地IPUCHAR CH9121_GATEWAY[4] //网关UCHAR CH9121_SUBNET_MASK[4] //子网掩码UCHAR CH9121_TARGET_IP[4] //目标IPUWORD CH9121_PORT1 //本地端口UWORD CH9121_TARGET_PORT //目标端口UDOUBLE CH9121_BAUD_RATE //串口波特率根据串口控制命令合理利用下面函数可进行参数配置:void CH9121_TX_4_bytes(UCHAR data, int command); //用于模式、是否随机端口、端口是否断开网络连接、是否清空串口数据、是否开启DHCP、是否开启串口2void CH9121_TX_5_bytes(UWORD data, int command);//用于设置串口的端口号void CH9121_TX_7_bytes(UCHAR data[], int command);//用于设置IP、子网掩码、网关void CH9121_TX_BAUD(UDOUBLE data, int command);//用于设置串口的波特率void CH9121_Eed(); //更新配置参数至 EEPROM、执行配置,复位 9121、离开配置模式Python部分用户只需修改Serial Port Parameter Configuration.py里面如下所示的值,就可以对模块进行串口参数配置: MODE = 1 #0:TCP Server 1:TCP Client 2:UDP Server 3:UDP ClientGATEWAY = (169, 254, 88, 1) # GATEWAYTARGET_IP = (169, 254, 88, 17)# TARGET_IPLOCAL_IP = (169,254,88,70) # LOCAL_IPSUBNET_MASK = (255,255,255,0) # SUBNET_MASKLOCAL_PORT1 = 5000 # LOCAL_PORT1LOCAL_PORT2 = 4000 # LOCAL_PORT2TARGET_PORT = 3000 # TARGET_PORTBAUD_RATE = 115200 # BAUD_RATE Pico快速上手文档原理图程序示例程序数据手册芯片 CH9121数据手册CH9121 串口控制指令集配置跟调试软件上位机跟SSCOMQQ : 202004841 |
 2、运行NetModuleConfig.exe设置模块参数,如下操作:(1).点击“搜索设备”,设备列表会显示出子网内模块;(2).双击设备列表里面的模块,在左侧修改参数,然后点击“配置设备参数”;(3).配置完成后,模块会重启,稍等一会,点击 “搜索设备”,找到模块,查看配置结果。(4).根据实际需求修改模块参数,例如:设置网络方式为 TCP CLIENT,目的 IP,目的端口与 TCP SERVER 的IP 和端口一致,再根据需求修改波特率等参数。然后点击配置设备参数。
2、运行NetModuleConfig.exe设置模块参数,如下操作:(1).点击“搜索设备”,设备列表会显示出子网内模块;(2).双击设备列表里面的模块,在左侧修改参数,然后点击“配置设备参数”;(3).配置完成后,模块会重启,稍等一会,点击 “搜索设备”,找到模块,查看配置结果。(4).根据实际需求修改模块参数,例如:设置网络方式为 TCP CLIENT,目的 IP,目的端口与 TCP SERVER 的IP 和端口一致,再根据需求修改波特率等参数。然后点击配置设备参数。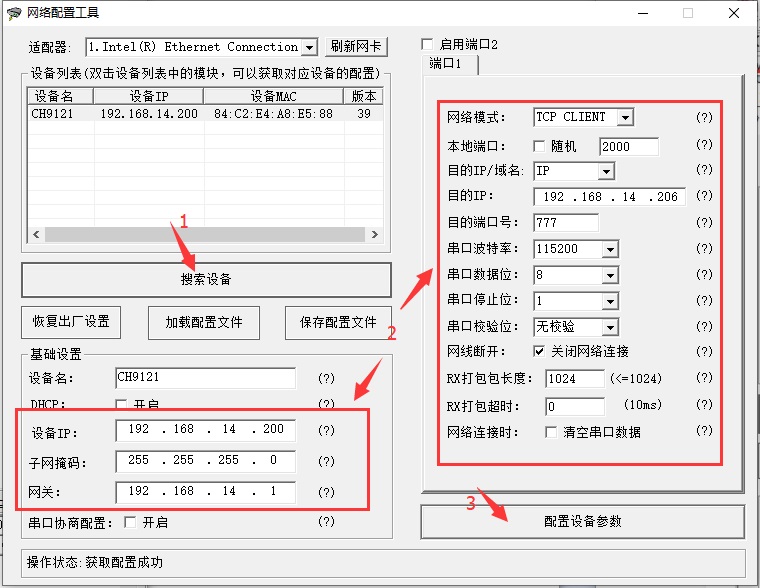 3、配置完之后,点击SSCOM的侦听,就连接起来了。
3、配置完之后,点击SSCOM的侦听,就连接起来了。
 2、通过SSCOM去连接配置成TCP SERVER的模块,连接起来会如下图显示:
2、通过SSCOM去连接配置成TCP SERVER的模块,连接起来会如下图显示:
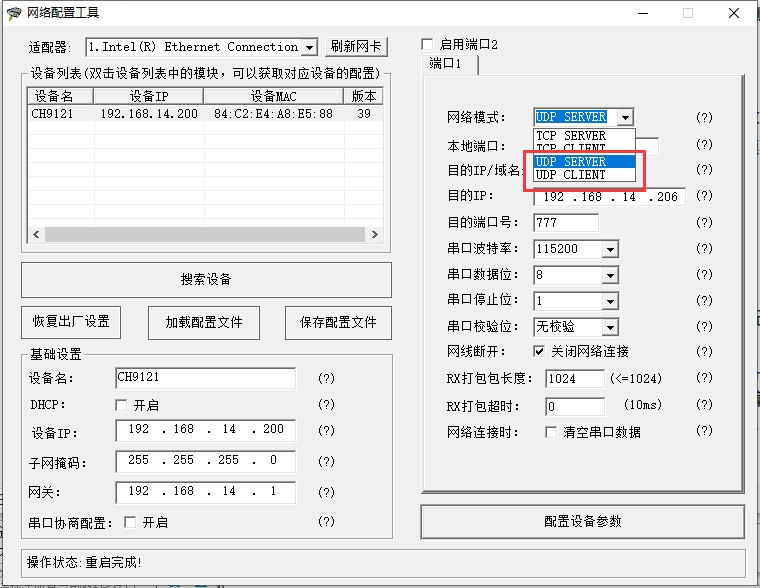 2、通过SSCOM去连接配置成UDP CLIENT/Servre的模块(SSCOM的UDP模式会自动连接,不管你的模式配置成CLIENT/Servre),连接起来会如下图显示:
2、通过SSCOM去连接配置成UDP CLIENT/Servre的模块(SSCOM的UDP模式会自动连接,不管你的模式配置成CLIENT/Servre),连接起来会如下图显示: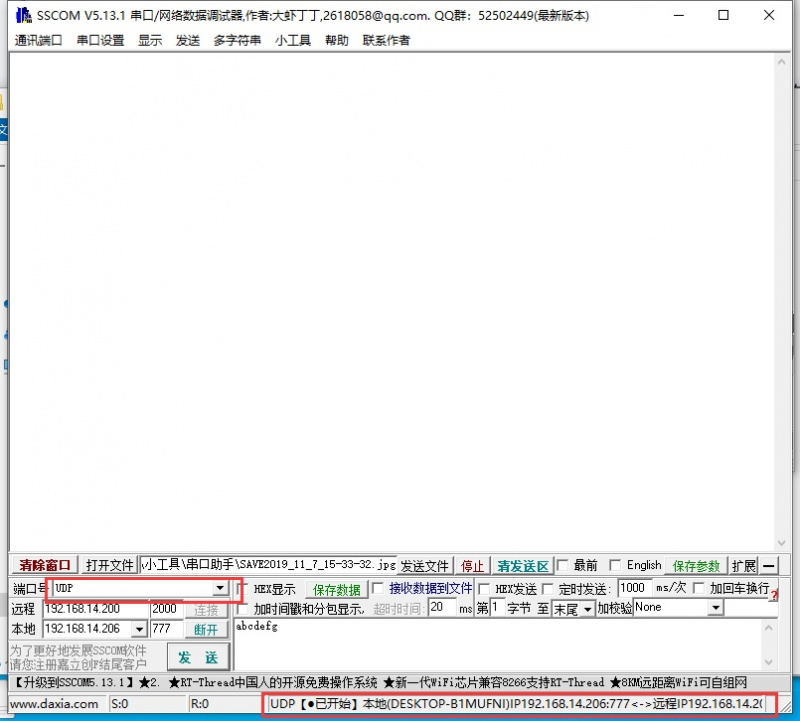
 如需使用屏幕,请将Pico-ETH-CH9121上的CFG0短路帽拔掉。
如需使用屏幕,请将Pico-ETH-CH9121上的CFG0短路帽拔掉。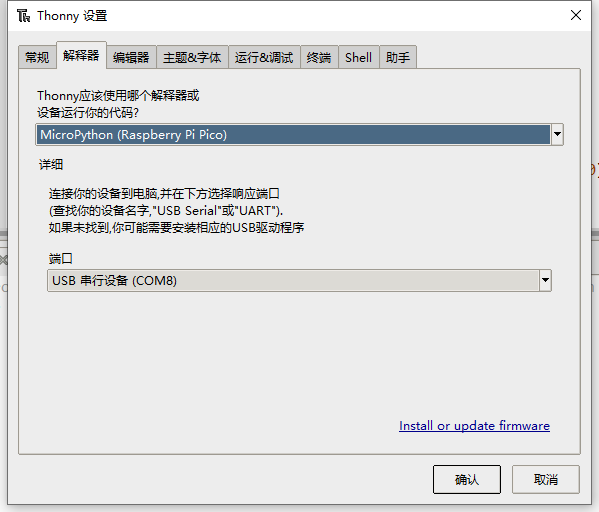 本例程提供了两个程序:Serial Port Parameter Configuration.py:该程序用来通过串口配置模式。RX_TX.py:这个用来进行信息收发,收到什么返回什么。
本例程提供了两个程序:Serial Port Parameter Configuration.py:该程序用来通过串口配置模式。RX_TX.py:这个用来进行信息收发,收到什么返回什么。
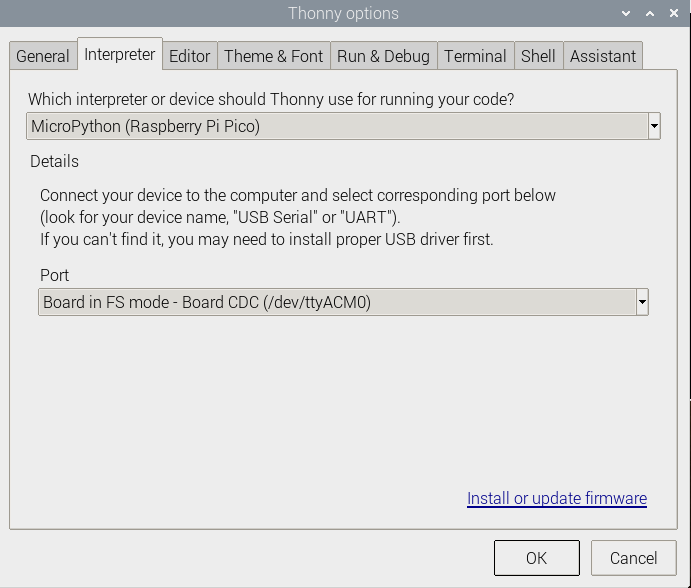 如果你当前的Thonny版本没有pico支持包,输入以下指令来更新Thonny IDE
如果你当前的Thonny版本没有pico支持包,输入以下指令来更新Thonny IDE【本文地址】