| 基于卫星的新时代导航STAN:与低轨道卫星信号同步跟踪和导航 | 您所在的位置:网站首页 › leo的全名 › 基于卫星的新时代导航STAN:与低轨道卫星信号同步跟踪和导航 |
基于卫星的新时代导航STAN:与低轨道卫星信号同步跟踪和导航
|
今天的车载导航系统将全球导航卫星系统(GNSS)接收器与惯性导航系统(INS)结合在一起。近地轨道(LEO)卫星信号是一个特别有吸引力的INS援助源在全球导航系统挑战的环境。 在接下来的几年里,Leo卫星将由有利的几何配置大量提供,并将在多个频段中传输,使其成为准确且坚固的导航源。本文介绍了一个框架,使导航车辆能够在GNSS信号变得无法使用时从Leo卫星信号中汲取的伪距和多普勒测量值,同时跟踪Leo卫星。这种同时跟踪和导航(STAN)框架在现实的仿真环境中展示,并在实验上在地面车辆和无人驾驶飞行器(UAV)上,显示了实现仪表级准确导航的可能性。 R灵活和准确的定位、导航和定时(PNT)在航空和运输等关键安全信息物理系统(CPS)中至关重要。随着CPS向完全自治的方向发展,对PNT系统的要求比以往任何时候都更加严格。没有人在循环中,不准确的PNT解决方案;或者更危险的是,PNT系统失效,可能会产生无法忍受的后果. 今天的车载导航系统将GNSS接收机与惯性导航系统(INS)结合在一起。通过耦合两个系统,可以利用各个子系统的互补性:惯性导航系统的短期精度和高数据率以及GNSS PNT解决方案的长期稳定性来提供周期性校正。然而,在不可避免的情况下,GNSS信号变得不可靠(例如,在城市的深谷或浓密的树叶附近)、不可用(例如,由于无意干扰或故意干扰)或不可信任(例如,由于恶意欺骗攻击或系统故障),导航系统依赖于独立惯性测量单元(IMU)数据,在这种情况下,误差累积并最终发散,危及车辆的高效和安全操作。
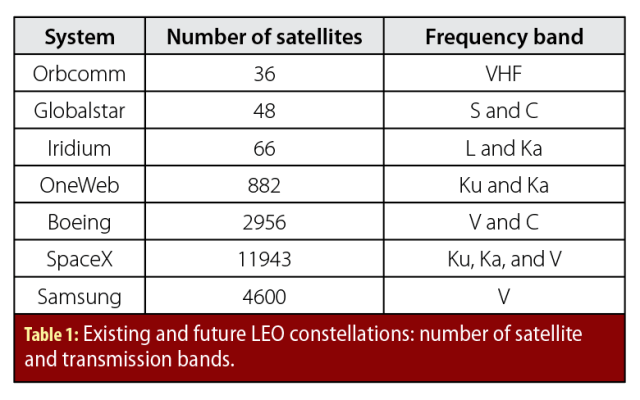
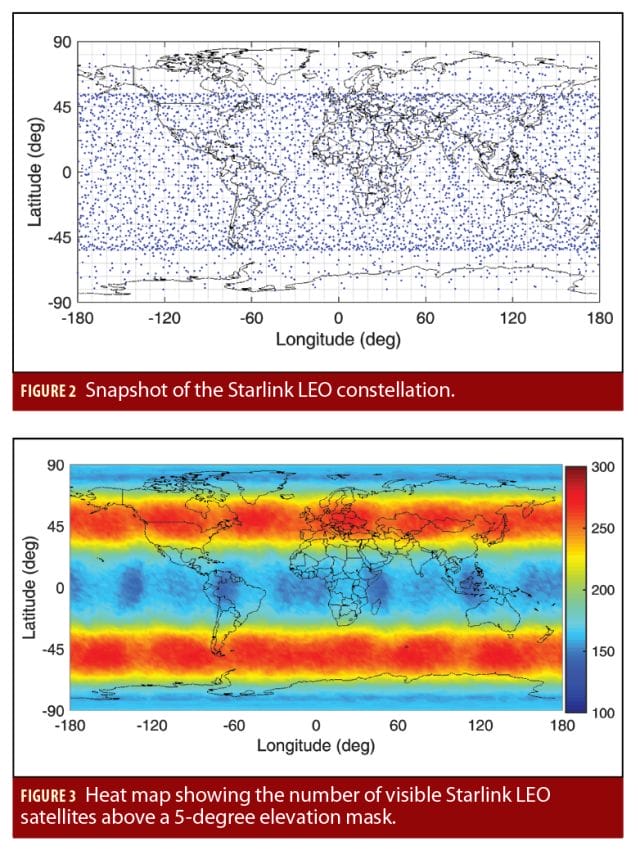
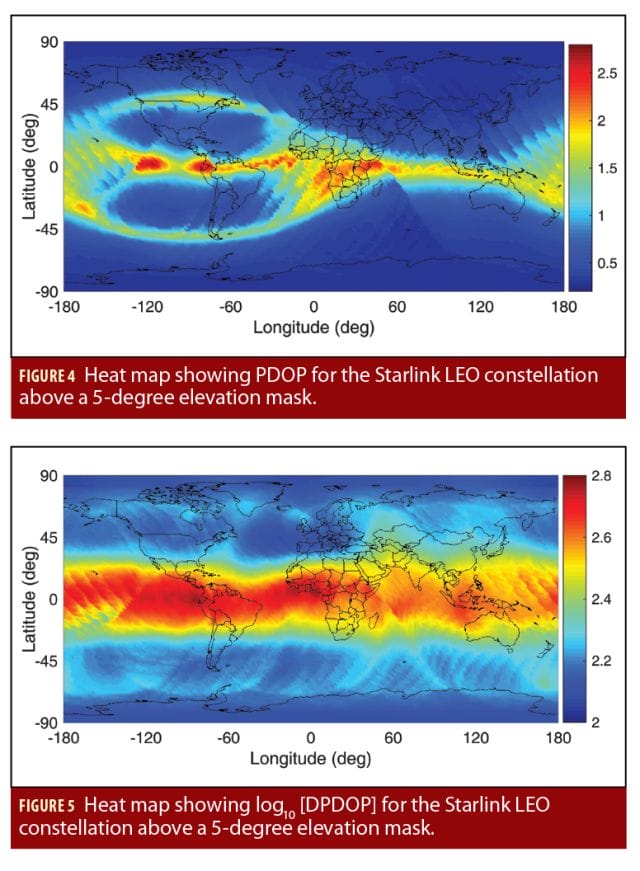
在全球导航系统(gnss)受到挑战的环境中,低地轨道卫星是特别有吸引力的辅助源,这有几个原因。首先,与位于中地球轨道(MEO)的GNSS卫星相比,低轨道卫星与地球的距离近20倍,这使得低轨道卫星接收到的信号明显更强大。其次,与GNSS卫星相比,低轨道卫星绕地球的速度要快得多,这使得低轨道卫星的多普勒测量具有开发吸引力。第三,OneWeb、波音、SpaceX (Starlink)、三星、开普勒、Telesat和LeoSat最近宣布通过卫星向世界提供宽带互联网,这将使数千颗新的低轨道卫星投入运行,使它们的信号在频率和方向上丰富多样。图1描绘了现有和未来狮子座卫星星座的子集。 表1总结了各星座的卫星数量和传输频带。 图2描绘了即将到来的星链星座的快照,而图3是一幅热图,显示在5度高度掩模上方可见的星链低地轨道卫星数目。 图5是显示星链星座位置精度稀释(PDOP)的热图,而图5是热图,显示精度(DPDOP)的多普勒位置稀释的对数。 图2通过图5和...一起表1展示了使用低轨卫星信号用于PNT的潜力,并暗示商业航天工业正在无意中创造新的PNT源,这些源可用于未来的车辆,使车辆的PNT系统更有弹性和准确。例如,与星链卫星连接的特斯拉可以按照设计为乘客提供互联网接入,同时也使车辆能够在不具备gnss功能的环境中导航。 要利用低轨道卫星进行导航,有几个挑战需要解决。首先,必须知道它们的位置和速度。任何卫星的位置和速度都可以用它的开普勒元素来参数化。这些元素被跟踪,每天更新一次,并由北美航空航天防御司令部(NORAD)公开提供。(参见北美航空航天防御司令部,额外资源)。然而,这些元素是动态的,将偏离其名义上可用的值,由于几个来源的扰动力,包括非均匀的地球重力场,大气阻力,太阳辐射压力,第三体引力(例如,月球和太阳的引力)和广义相对论(检查者,额外的参考资料)。如果不进行修正,这些偏差可能导致传播卫星轨道高达3公里的误差。其次,低轨道卫星不一定配备原子钟,它们也不是精确同步的。随后,必须知道它们的时钟误差以及它们的位置和速度。GNSS在导航电文中定期向接收机发送对轨道元素和时钟误差的修正,与此相反,这种轨道元素和时钟修正可能无法用于LEO卫星;在这种情况下,它们必须和接收方的状态一起被估计。第三,电离层延迟率对低地轨道卫星,特别是在甚高频波段发射的卫星来说变得重要。 本文介绍了解决上述挑战的同时跟踪和导航(STAN)框架(更多信息,见Morales等人的两篇论文)。该框架跟踪低轨道卫星的状态,同时使用伪距和多普勒测量从其信号中提取,以帮助车辆的INS。STAN框架的性能在真实仿真环境中进行了演示,并在地面车辆和无人机(UAV)上进行了实验,显示了实现米级精确导航的潜力。
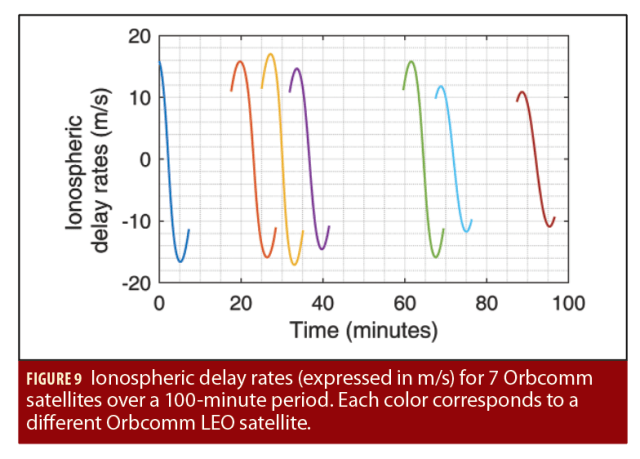
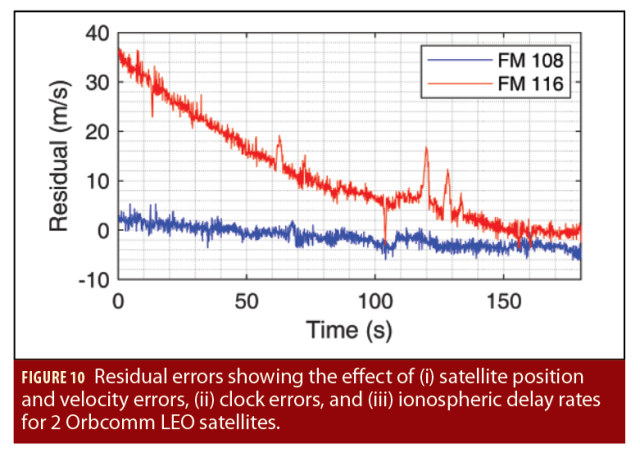
伪距,多普勒测量模型 本节介绍LEO卫星接收器伪距和多普勒测量模型,并讨论了基于LEO的定位误差:(i)卫星位置和速度误差,(ii)卫星和接收器时钟误差,(iii)电离层和对流层延迟速率错误。 伪距和多普勒测量模型 低轨道卫星接收机从低轨道卫星信号中提取伪距和多普勒频率测量值。伪距率的测量可以从 其中为光速,为载频。第m颗LEO卫星在时间步长的伪距表示初始时间和采样时间T的离散时间,模型为 在其中,表示来自M-TH Leo卫星的信号的真正飞行时间的离散时间;Leo接收器和第m Leo卫星的3-D位置矢量分别是Leo接收器和第M Leo卫星的3d;是Leo接收器和第M Leo卫星发射机时钟偏差分别;是电离层和对流层延迟,分别影响M-TH Leo卫星信号;并且是伪奇测量噪声,其与具有方差的白色高斯随机序列建模。来自第M个Leo卫星的伪距速率测量是给出的 其中,分别为LEO接收机和第m颗LEO卫星的三维速度矢量;,分别为LEO接收机和第m次LEO卫星发射机时钟漂移;和分别为影响第m次LEO卫星信号的电离层和对流层延迟的漂移;是伪距率测量噪声,它被建模为带有方差的高斯白随机序列。 B.位置和速度误差 当用低轨道卫星信号导航时,一个应该考虑的误差来源是由于对低轨道卫星的位置和速度的不完全了解。这是由于时变的开普勒元素引起的几个扰动加速度作用在卫星上。平均开普勒元素和扰动加速度参数包含在公开的两行元素(TLE)文件集中。这些文件中的信息可用于初始化一个简化的一般扰动(SGP)模型,该模型是专门为传播低地轨道卫星的轨道而设计的。SGP传播器(例如,sp4)通过替换复杂的扰动加速度模型来优化速度,这些模型需要用解析表达式来将卫星位置从历元时间传播到指定的未来时间。权衡是在卫星位置精度上:SGP4传播器在历元时有大约3公里的位置误差,传播的轨道将继续偏离它的真实轨道,直到第二天TLE文件更新。图6显示了Orbcomm LEO卫星(FM 112)的累计位置和速度误差。 c .时钟错误 与GNSS相比,LEO卫星时钟没有紧密同步,并且时钟误差(偏置和漂移)对接收器未知。此外,Leo卫星不一定配备高质量的原子钟。从现有的Leo星座中所知,Leo卫星配有烤箱控制的晶体振荡器(OCXO)。实际上,导航接收器将配备较低质量的振荡器,例如,温度补偿晶体振荡器(TCXO)。为了可视化卫星和接收器时钟中的时钟误差的大小,图7描述了一个典型的OCXO和一个典型的TCXO的时钟偏置和漂移的时间演化,从所谓的双态时钟模型得到(Brown and Hwang,额外资源)。它可以从图7认为卫星和接收机的时钟偏差和漂移可能变得非常显著;因此,它们必须得到适当的解释。 D.电离层延迟误差 大多数宽带LEO星座位于电离层上方,这反过来会导致延迟进入其信号。虽然Leo卫星信号通过对流层传播,但与电离层繁殖相比,其效果不太显着。电离层延迟速率的大小是(i)与载流子频率的平方成反比,与倾斜因子的变化率成比例,该倾斜度因子的变化率是由卫星仰角的时间的进化决定的。注意,电离层延迟率还取决于天顶的总电子含量(TEC)的变化率,由TECV表示。然而,TECV比卫星的仰角变得慢得多;因此,它的效果可能被忽略。电离层传播的效果在Leo卫星信号上显着,因为(i)Leo卫星的高速转化为非常快速的变化高度角度,如图所示图8(ii)一些现有的Leo卫星在VHF频段中传输,其中信号经历了非常大的延迟速率。上述因素导致大电离层延迟速率,如图所示图9在100分钟内为7颗Orbcomm卫星发射。 以可视化的效果(i)的卫星位置和速度误差,(ii)时钟漂移误差,和(3)电离层延迟率,测量伪距率之间的残差和伪距率从获得的卫星位置和速度估计和SGP4策划框架文件图102颗Orbcomm卫星(FM 108和FM 116)。
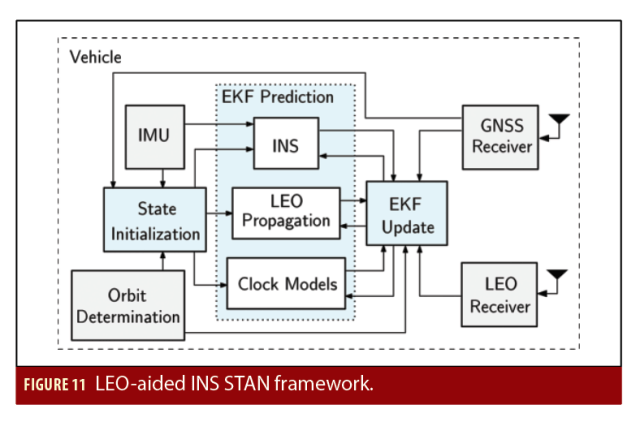
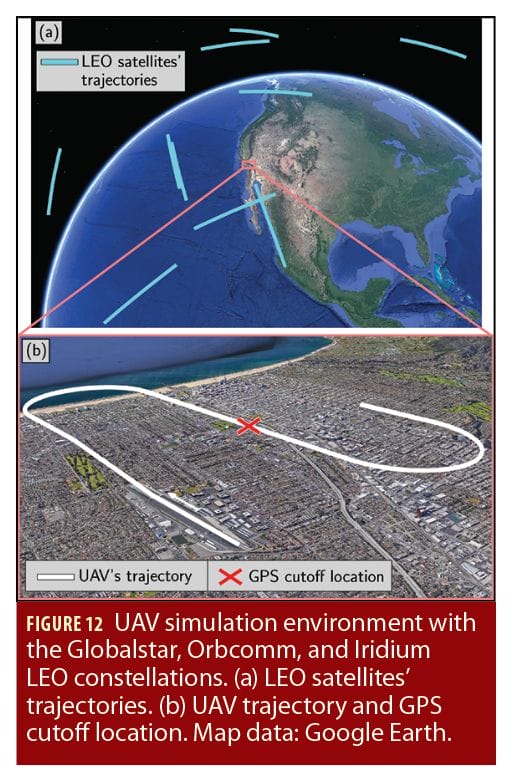
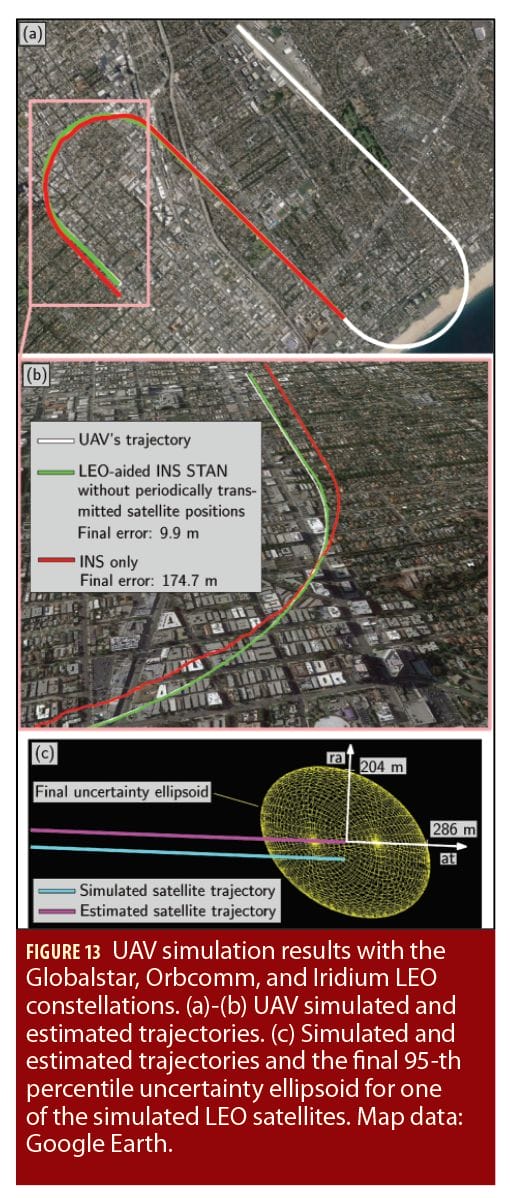
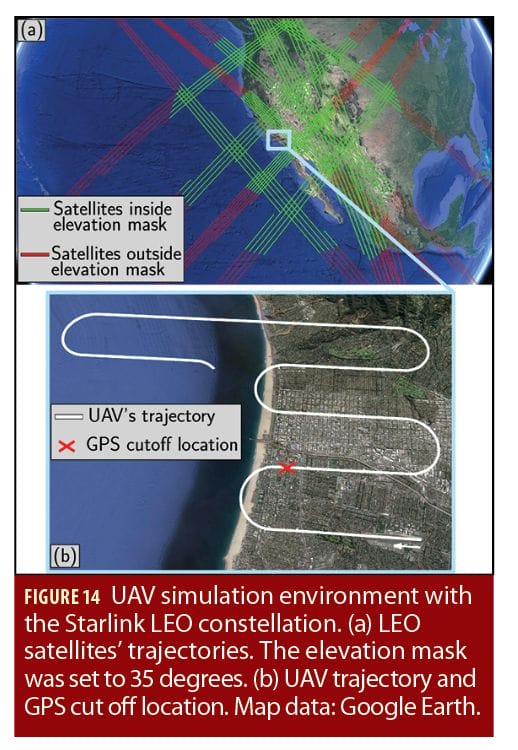
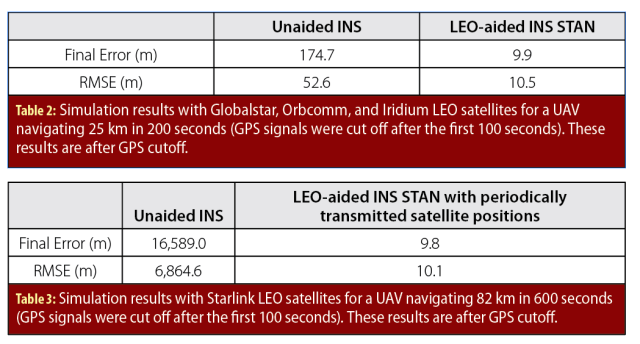
斯坦框架 为了利用低轨卫星信号进行导航,必须知道它们的状态。与定期发送关于其位置和时钟误差的准确信息的全球导航卫星不同,低地轨道卫星的此类信息可能无法获得。STAN框架通过从低轨道卫星提取伪距和多普勒测量来解决这个问题,以帮助车辆的INS,同时跟踪低轨道卫星。STAN框架采用扩展卡尔曼滤波器(EKF)同时估计轨道飞行器和低轨道卫星的状态。图11描述了STAN框架。 仿真结果 本节介绍了在一个真实的仿真环境中获得的仿真结果,演示了无人机在没有GNSS信号的情况下通过leo辅助INS STAN框架导航。第一小节评估当前LEO星座的实现性能(Globalstar,Orbcomm和Iridium),而第二部分评估的是即将到来的LEO星座:星链所实现的性能。 A.利用globalstar、orbcomm、和铱星座星座 UAV配备了(i)战术级IMU,(ii)GPS和Leo卫星接收器,(iii)压力高度计。UAV导航美国加利福尼亚州的Santa Monica,美国,在200秒内约25公里,在此期间它只能访问GPS信号,仅为前100秒。剥离后,无人机会使4个银行业转弯。模拟了10个Leo卫星轨迹。Leo卫星轨道对应于Globalstar,Orbcomm和Iridium Constellations。在整个轨迹的所有10个Leo卫星上,无人机使伪奇和伪速率测量。使用TLE文件和SGP4传播初始化LEO卫星的位置和速度。图12显示了模拟Leo卫星的轨迹以及无人机的轨迹以及切断GPS信号的位置。 为了估计无人机的轨迹,实现了2种导航框架:(i) neo辅助惯导系统STAN框架和(ii)传统gps辅助惯导系统进行比较分析。每个框架只能在前100秒使用GPS。图13 (a) (b)说明了UAV的真实轨迹,并且由每个框架中的每一个估计的那些图13 (c)说明了其中一颗LEO卫星的模拟和估计轨道,以及最后的95百分位不确定性椭球(轴表示径向(ra)和沿轨道(在)方向)。表2.总结了GPS截断后各框架的最终误差和位置均方根误差(RMSE)。 B.利用星链Leo星座周期性发射Leo卫星位置的无人机仿真 UAV配备(i)战术级IMU和(ii)GPS和Leo卫星接收器。UAV导航美国加利福尼亚州的Santa Monica,美国,在10分钟内约82公里,在此期间它只能访问GPS信号,仅为前100秒。升降后,无人机会使10个银行交通。模拟的狮子座卫星轨迹与即将到来的铜线星座相对应。假设Leo卫星配备有GPS接收器,并定期传输其估计位置。总共有78个Leo SV,通过预设的35°高度面罩集,平均在任何时间点都有27个SV。所有Leo卫星的无人机对所有Leo卫星制作了伪逻辑和伪距速率测量。使用第一个传输的Leo卫星位置初始化STAN框架中的Leo卫星的位置,该位置由GPS接收器生产的Leo卫星。图14显示了模拟Leo卫星的轨迹以及无人机的轨迹以及切断GPS信号的位置(Ardito et艾莉雅)。 为了估计无人机的轨迹,实现了2个导航框架来估计车辆的轨迹:(i) neo - assisted INS STAN框架和(ii)传统gps - assisted INS用于比较分析。每个框架只能在前100秒使用GPS。图15 (a) (b)说明了无人机的真实轨迹和2个框架的估计图15 (c)说明了其中一颗LEO卫星的模拟和估计轨道,以及最后的95百分位不确定性椭球(轴表示径向(ra)和沿轨道(在)方向)。表3总结了GPS截断后各框架实现的最终误差和位置均方根误差。
实验演示 本节介绍了现有的Orbcomm LEO星座和LEO接收机。然后,在地面车辆和具有真实Orbcomm卫星信号的无人机上演示了leo辅助INS STAN框架的性能。 Orbcomm公司系统概述 Orbcomm系统是一个广域双向通信系统,使用一个LEO卫星星座提供全球地理覆盖,用于发送和接收字母数字包(参见Orbcomm,其他资源)。Orbcomm系统包括3个主要部分:(i)用户通信(用户),(ii)地面段(网关)和(iii)空间段(卫betway必威精装版星星座)。下面将简要讨论这些部分。 (i)通betway必威精装版讯用户:SCs有几种类型。Orbcomm用于固定数据应用的SC使用低成本甚高频电子betway官网设备。移动双向信息系统是一个手持的独立单位。 (ii)地面段:地面段由网关控制中心(GCCs)、网关地面站(GESs)和网络控制中心(NCC)组成。GCC提供交换能力,通过标准通信模式将移动SCs与地面客户系统连接起来。GESs将地面段与空间段连接起来。GESs主要根据轨道信息跟踪和监测卫星,并从卫星,GCC或NCC发送和接收。NCC负责通过遥测监测、系统指挥和任务系统分析管理Orbcomm网络单元和网关。 (iii)空间细分:Orbcomm卫星用于完成SCs和NCC或GCC的交换能力之间的连接。
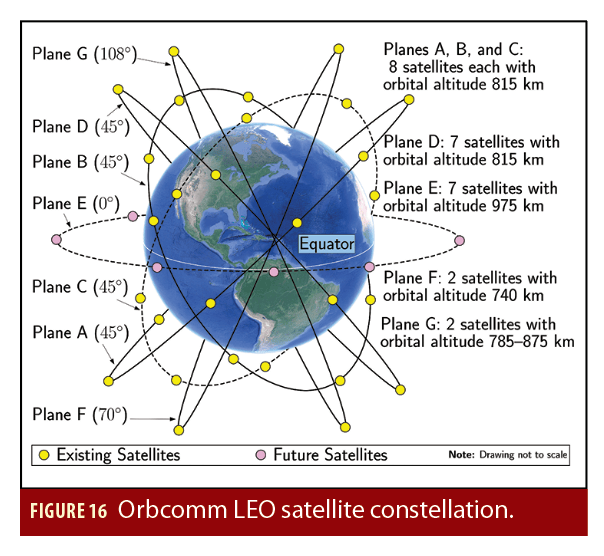
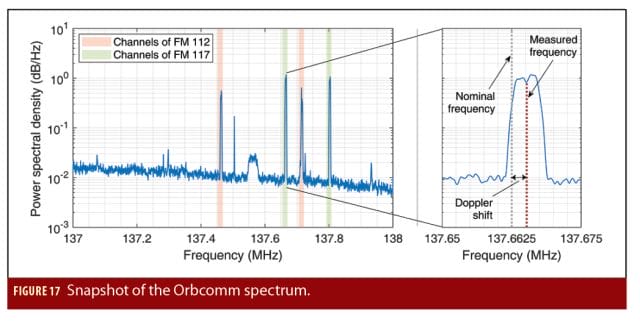
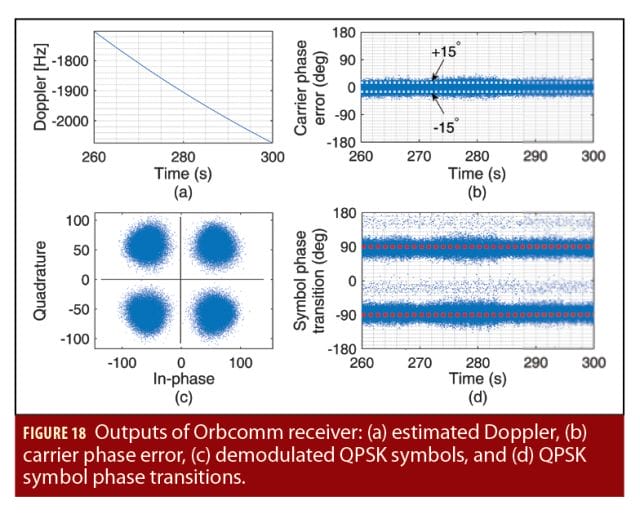
轨道通信卫星星座 以最大容量,在7个轨道平面A-G中具有最多47个卫星的ORBCOMM星座,如图所示图16。飞机A、B和C与赤道呈45°倾斜度,每架飞机在大约815公里的圆形轨道上有8颗卫星。同样以45°倾斜的D平面上有7颗卫星在一个圆形轨道上,高度为815公里。E平面呈0°倾斜,在975公里高度的圆形轨道上有7颗卫星。F平面倾角为70°,在740公里高度的近极圆形轨道上有2颗卫星。G平面倾斜108°,在近极椭圆轨道上有2颗卫星,其高度在785到875公里之间。 低轨接收机从Orbcomm下行信道的低轨信号中获取伪橙色率观测值。卫星无线电频率(RF)下行连接SCs和GESs在137-138 MHz VHF频段内。下行通道包括向sc发送的12个通道和向GESs发送的1个网关通道。每颗卫星透过12个用户下行频道中的一个传送至SCs,透过一套频率共享方案,可重复使用4倍频道。betway必威精装版Orbcomm卫星有一个用户发射机,使用对称差分正交相移键控betway必威精装版(SD-QPSK)提供连续4800位/秒(bps)的数据包数据流。每颗卫星也有多个用户接收器,以2400 bps的速度接收来自南海的betway必威精装版短脉冲信号。图17显示ORBCOMM频谱的快照。 图18显示了一些用于从Orbcomm信号中提取多普勒测量的接收机内部信号,主要是(a)多普勒频率的估计,(b)载波相位跟踪误差,(c)解调QPSK调制,(d) QPSK符号相变。Orbcomm接收机是自主系统感知、智能和导航(ASPIN)实验室开发的多通道自适应收发信息提取器(MATRIX)软件定义无线电(SDR)的一部分(参见http://aspin.eng.uci.edu)(自主系统感知、智能和导航实验室,其他资源)。接收器执行载波同步,提取伪距速率可观察,并解码ORBCOMM星历消息。 需要注意的是,Orbcomm卫星还配备了一个特殊构造的1瓦超高频(UHF)发射机,该发射机被设计为发射高度稳定的40.1兆赫信号。发射机耦合到一个超高频天线,其峰值增益约为2分贝。UHF信号被Orbcomm系统用于SC定位。但实验数据显示,没有UHF信标。此外,即使存在超高频信标,也需要付费用户才能从定位服务中受益。betway必威精装版因此,在这项工作中,只有下行VHF信号使用在低轨道辅助INS STAN。
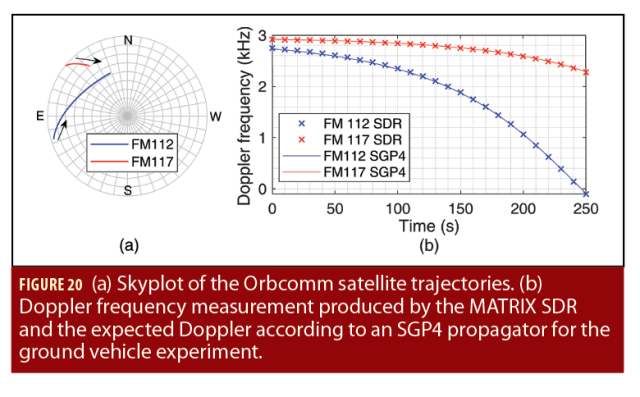
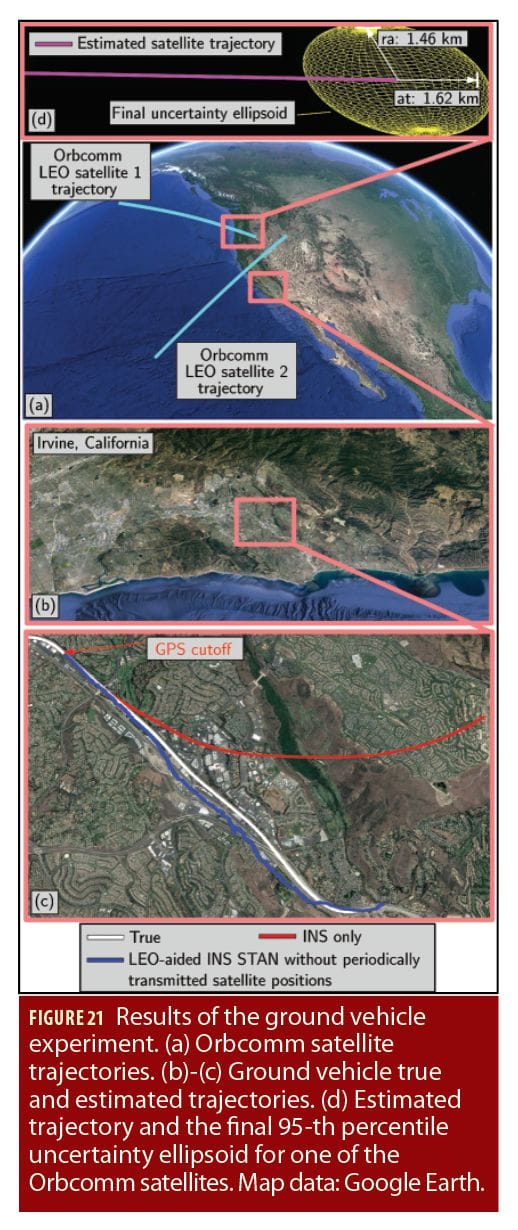
地面车辆导航 在地面车辆长轨迹行驶过程中,对低轨道辅助惯导系统STAN框架进行了性能测试。为此,一辆汽车配备了以下硬件和软件设置: •定制构建的四极螺旋VHF天线 •通用软件无线电外设(USRP),用于采集Orbcomm信号。这些样品随后由MATRIX SDR的Orbcomm接收模块进行处理。 •集成的GNSS-IMU,配备双天线,多频GNSS接收器和微机电系统(MEMS)IMU。处理后的软件开发套件(PP-SDK)用于处理由GNSS-IMU收集的GPS载波相位可观察,并由附近的差分GPS基站获得以获得基于载波相位的导航解决方案。这种集成的GNSS-IMU实时运动(RTK)系统用于产生比较STAN导航框架的地面真理结果。 实验设置显示在图19。 地面车辆沿着美国加利福尼亚州加利福尼亚州欧文境内的5号州际公路推动,在258秒内为7,495米,在此期间可提供2个Orbcomm Leo卫星(FM 112和FM 117)。图20 (a)描绘了在实验过程中卫星轨迹的天空局。图20(b)显示了矩阵SDR测量的多普勒,以及利用从TLE文件和一个SGP4传播器获得的卫星位置和速度的估计多普勒。 为了估计无人机的轨迹,实现了2个导航框架来估计地面车辆的轨迹:(i) neo辅助INS STAN框架和(ii)传统gps辅助INS进行比较分析。每个框架只能在最初的30秒内使用GPS。图21 (a)说明了2颗Orbcomm近地轨道卫星在实验过程中所经过的轨迹,图21(b) - (c)说明地面车辆的真正轨迹以及由2个框架中的每一个估计的那些图21 (d)说明了Orbcomm卫星的估计轨道以及最后的95百分位不确定性椭球(轴表示径向(ra)和沿轨道(在)方向)。 表4.总结了GPS截断后各框架实现的最终误差和位置均方根误差。
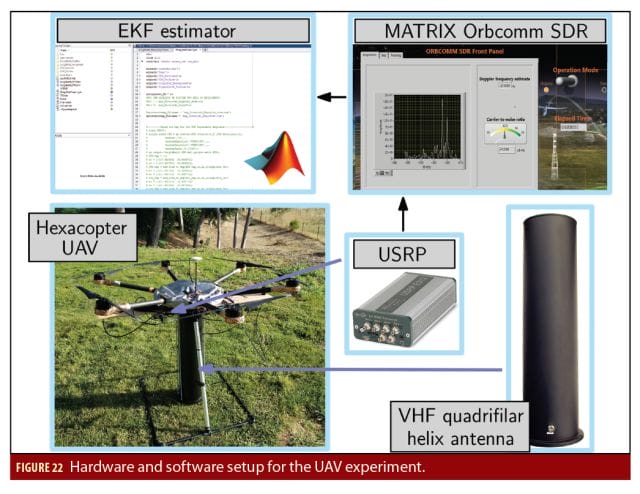
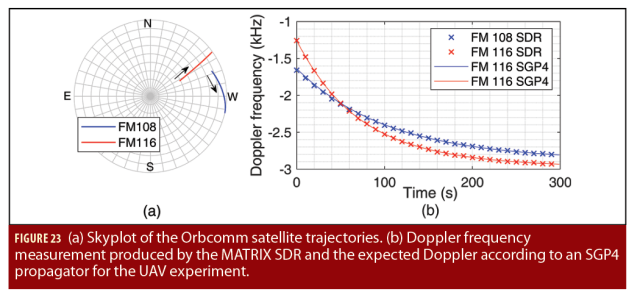
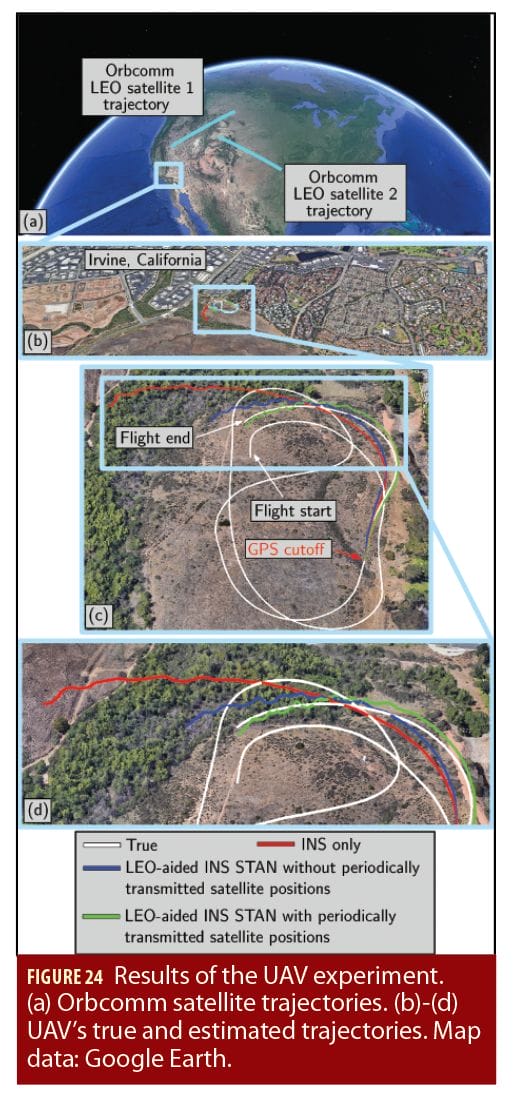
答:无人机导航 在某型无人机上进行了激光辅助惯导系统STAN框架性能评估实验。为此,无人机配备了以下硬件和软件设置: •高端四股螺旋天线 •一个USRP来采样Orbcomm信号。这些样品随后由MATRIX SDR的Orbcomm接收模块进行处理。 •一个消费级MEMS IMU,这是无人机制造商的专有硬件,用于其飞行控制器。从无人机上下载日志文件来解析原始IMU数据,这些数据随后被提供给STAN框架的INS。 •一个压力高度计,这也是无人机制造商的专有硬件,用于其飞行控制器。从无人机上下载日志文件来解析高度测量数据,这些数据随后被输入到STAN框架的EKF中。 地面真理轨迹从UAV的板载导航系统中取出,该系统由MEMS IMU组成,多星座GNSS接收器(GPS和GLONASS),压力高度计和磁力计。必威首页登录平台实验设置显示在图22。 UAV在美国加利福尼亚州尔湾飞行一个指挥轨迹,超过155秒的时间期间2颗Orbcomm近地轨道卫星可用(FM 108和FM 116)。图23 (a)描绘了在实验过程中卫星轨迹的天空局。图23 (b)显示了矩阵SDR测量的多普勒,以及利用从TLE文件和一个SGP4传播器获得的卫星位置和速度的估计多普勒。 为了估计无人机的轨迹,实现了3个框架来估计无人机的轨迹:(i)使用TLE文件初始化的neo -aided INS STAN框架,(ii)使用由Orbcomm卫星发送的定期解码的LEO卫星位置的neo -aided INS STAN框架,以及(iii)用于比较分析的传统GPS-aided INS。并与无人机机载导航系统提取的轨迹进行了比较。每个框架只能在最初的125秒内使用GPS。图24 (a)显示了在实验过程中遍历的2个Orbcomm Leo卫星的轨迹。图24 (b) - (d)说明了UAV的真实轨迹,并且由3个框架中的每一个估计的那些。表5.总结了GPS截断后各框架实现的最终误差和位置均方根误差。
制造商 在地面车辆导航部分,作者安装了一个Ettus E312通用软件无线电外设(USRP),来自Ettus Research (Austin, Texas, USA),用于采集Orbcomm信号;一个AsteRx-I V集成GNSS-IMU来自Septentrio (Leuven, Belgium和Torrance, California, USA);a VectorNav VN-100微电子机械系统(MEMS) IMU,来自VectorNav Technologies (Dallas, Texas, USA);使用Septentrio公司的后处理软件开发工具包(PP-SDK)对采集到的GPS载波相位观测数据进行处理。 在评估neo辅助INS STAN框架在无人机上的性能的实验中,使用了一架带有A3飞行控制器的DJI矩阵600无人机(中国深圳);再次,设置包括Ettus E312 USRP从Ettus研究(奥斯汀,德克萨斯州,美国)。 确认 这项工作部分由海军研究办公室(INR)局在年轻的调查员计划(YIP)颁发,部分是由1929965年的国家科学基金会(NSF)职业奖。作者要感谢Christian Ardito,Linh Nguyen,Ali Abdallah,Mohammad Orabi,Kimia Shamaei,Mahdi Maaref和Naji Tarabay在数据收集中的帮助。 参考文献 (1)Ardito,C.,J. Morales,J.Kalife,A. Abdallah和Z.Abassas,“使用Leo卫星信号进行航行的绩效评估,定期传播卫星职位”,在2019年离子国际技术会议的诉讼程序中,PP。306-318。 (2)自主系统感知、智能和导航(ASPIN)实验室http://aspin.eng.uci.edu (3)棕色R.和P. Hwang,随机信号引入和应用卡尔曼滤波,第3 red。John Wiley&Sons,2002。 (4)Driusso, M., C. Marshall, M. Sabathy, F. Knutti, H. Mathis, F. Babich,“使用LTE信号的车辆位置跟踪”,《IEEE车辆技术学报》,第66卷,第2期。4, pp. 3376-3391, 2017年4月。 (5)Fang S, Chen j, Huang h, and T. Lin,“FM是一种基于rf的定位解决方案在大都市规模的环境中吗?无线电测量分析的概率方法,《IEEE广播学报》,第55卷,第1期。3, 577-588页,2009年9月。 (6)2019年2月27日,美国联邦通信委员会(FCC)发表声明称,“FCC促进美国的卫星宽带连接和竞争”,https://www.fcc.gov/document/fcc-boosts-satellite-broadband-connectivity-competition, 2018年11月。 (7)Hall, T., C. Counselman III,和P. Misra,“使用AM广播信号的无线电定位:定位性能”,收录于ION GPS会议论文集,2002年9月,第921-932页。 (8)Joerger, M., L. Gratton, B. Pervan, C. Cohen,“用于浮动载波相位定位的铱增强GPS分析”,导航,导航学会学报,第57卷,第2期。2,页137-160,2010。 (9)“合作机会主义导航”,《IEEE航空和电子系统杂志》,第28卷,第1期。6, 38-41页,2013。 (10)Kassas, Z., J. Khalife, K. Shamaei, J. Morales,“我听到了,所以我知道我在哪里:用蜂窝信号补偿GNSS的限制,”IEEE信号处理杂志,第111-124页,2017年9月。 (11)Kassas, Z., J. Morales, K. Shamaei, J. khalfe,“LTE引导无人机”,《GPS世界杂志》,第28卷,第1期。4,页18-25,2017年4月。 (12)Khalife J.和Z. Kassas,“蜂窝CDMA信号导航-第二部分:性能分析和实验结果”,IEEE信号处理学报,第66卷,第2期。8, pp. 2204-2218, 2018年4月。 (13)Khalife J.和Z. Kassas,“基于蜂窝载波相位测量的无人机精确导航”,《IEEE/ION位置、位置和导航研讨会论文集》,2018年4月,第978-989页。 (14)Lawrence, D., H. Cobb, G. Gutt, M. O 'Connor, T. Reid, T. Walter, D. Whelan,“LEO导航:当前的能力和未来的承诺”,《GPS世界杂志》,第28卷,第1期。2017年7月,第42-48页。 (15)Maaref M.和Z. Kassas,“在受gnss挑战的环境中,使用机会信号和闭环地图匹配方法进行地面车辆导航,”IEEE智能交通系统学报,2019年,接受。 (16)Maaref, M., J. Khalife, Z. Kassas,“融合激光雷达数据和蜂窝伪信号在挑战gnss环境中的车道级定位和绘图”,《IEEE智能车辆学报》,第4卷,第2期。1, 73-89页,2019年3月。 (17)Merry,L.,R. Faragher和S. Schedin“定位的机会主义信号的比较”IFAC智能自治车讨论会的核心自治课程,2010年9月,PP。109-114。 (18)Morales,J.,P. Roysdon和Z.Kassas,“机会援助惯性导航的信号”,在Ion GNSS会议上,2016年9月,PP .1492-1501。 (19)Morales,J.,J.Kalife,A. Abdallah,C. Ardito和Z. Kassas,“与Orbcomm Leo Satellite多普勒测量有助于”Ion GNSS会议的“惯性导航系统,”2018年9月,PP。2718-2725. (20)Morales, J., J. Khalife,和Z. Kassas,“借助多普勒测量辅助的Orbcomm LEO卫星和惯性导航系统同步跟踪”,发表在IEEE车载技术会议学报,2019年,第1-6页。 (21)北美航空航天防御司令部(NORAD),“两线元件集”,http://celestrak.com/NO-RAD/elements/。 (22)Orbcomm,“网络:卫星”,https://www.orbcomm.com/en/networks/satellite,访问2018年9月30日。 (23)Rabinowitz M.和J. Spilker,Jr.,“使用电视同步信号的新定位系统”,广播上的IEEE交易,Vol。51,没有。1,pp。2005年3月51-61。 (24)Reid,T.,A. Neish,T. Walter和P. Enge,“导航宽带Leo星座”,导航,导航研究所,Vol。65,不。2,pp。205-220,2018。 (25)Shamaei, K., J. Khalife,和Z. Kassas,“利用LTE信号进行导航:理论到实现”,《IEEE无线通信学报》,第17卷,第4期。4,页2173-2189,2018年4月。 (26)Shamaei K.和Z. Kassas,“城市环境下导航的LTE接收机设计和多径分析”,导航学报,第65卷,第6期。4, 655-675页,2018年12月。 (27)Thevenon, P., S. Damien, O. Julien, C. Macabiau, M. Bousquet, L. Ries, S. Corazza,“基于DVB-SH标准的移动电视定位”,导航,导航学会学报,第58卷,第2期。2,页71-90,2011。 (28)50年的轨道确定:现代天体动力学方法的发展,约翰霍普金斯APL技术文摘,第27卷,第2期。3, 239-252页,2007年11月。 (29)Yang, C., T. Nguyen, and E. Blasch,“基于机会混合信号融合的移动定位”,《IEEE航空航天与电子系统杂志》,第29卷,第1期。4, 34-46页,2014年4月。 作者 Zaher (Zak) M. Kassas现任加州大学欧文分校(UCI)机械与航空航天工程系、电气工程与计算机科学系助理教授,自主系统感知、智能与导航(ASPIN)实验室主任。他在黎巴嫩美国大学(the lebanon American University)获得电气工程学士学位,在俄亥俄州立大学(the Ohio State University)获得电气和计算机工程硕士学位,在德克萨斯大学奥斯汀分校(the University of Texas at Austin)获得航空航天工程硕士学位和电气和计算机工程博士学位。2018年,他获得了国家科学基金(NSF)教师早期职业发展计划(Career)奖,2019年,他获得了海军研究办公室(ONR)青年研究员计划(YIP)奖。他的研究兴趣包括信息物理系统、估计理论、导航系统、自动驾驶车辆和智能交通系统。 约书亚·j·莫拉莱斯UCI电气工程与计算机科学系博士研究生,ASPIN实验室成员。他获得了加州大学河滨分校(the University of California, Riverside)的电气工程学士学位。2016年,他获得了美国国家科学基金会(NSF)的荣誉奖。他的研究兴趣包括估计理论、导航系统、自动驾驶车辆和智能交通系统。 乔·j·KhalifeUCI电气工程与计算机科学系博士研究生,ASPIN实验室成员。他获得了黎巴嫩美国大学电气工程学士学位和计算机工程硕士学位。2018年,他在IEEE/ION Position, Location, and Navigation Symposium (PLANS)上获得了IEEE Walter Fried最佳论文奖。他的研究兴趣包括机会导航、自动驾驶汽车和软件定义无线电。 相关文章: 成长中的GALILEO -新技术,新…
成长中的GALILEO -新技术,新…
 侧边栏:基于精度的完整性的要求......
侧边栏:基于精度的完整性的要求......
 基于L1和L5 GNSS信号的定时解决方案
基于L1和L5 GNSS信号的定时解决方案
 双估计器-一种新的接收机原理
双估计器-一种新的接收机原理
|
 机会信号是PNT源,可用于受gnss挑战的环境(参见Merry等人,和Kassas, 2013年,附加资源)。这些信号包括AM/FM无线电、蜂窝网络、数字电视和低地球轨道卫星(其他参考资料中列出的几篇论文提供了更详细的信息)。机会信号已被证明可在地面车辆上产生独立的米级精确导航解决方案,在空中车辆上产生厘米级精确导航解决方案。此外,这些信号已被用作激光雷达和惯导系统的辅助源。
机会信号是PNT源,可用于受gnss挑战的环境(参见Merry等人,和Kassas, 2013年,附加资源)。这些信号包括AM/FM无线电、蜂窝网络、数字电视和低地球轨道卫星(其他参考资料中列出的几篇论文提供了更详细的信息)。机会信号已被证明可在地面车辆上产生独立的米级精确导航解决方案,在空中车辆上产生厘米级精确导航解决方案。此外,这些信号已被用作激光雷达和惯导系统的辅助源。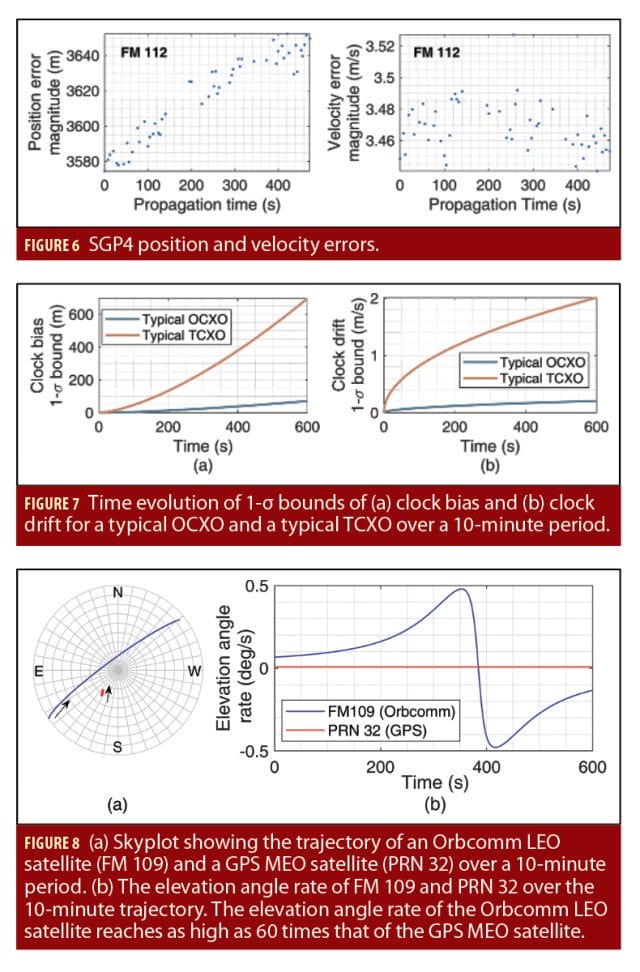




【本文地址】