| Gazebo仿真 | 您所在的位置:网站首页 › kinect使用教程 › Gazebo仿真 |
Gazebo仿真
|
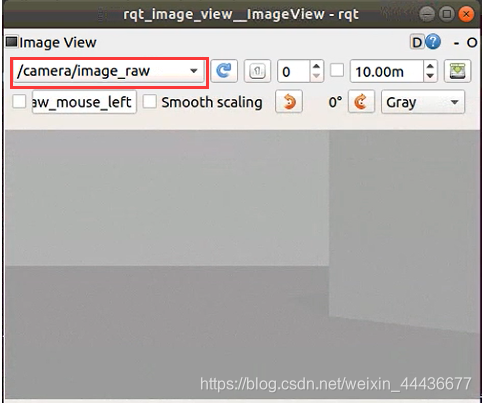
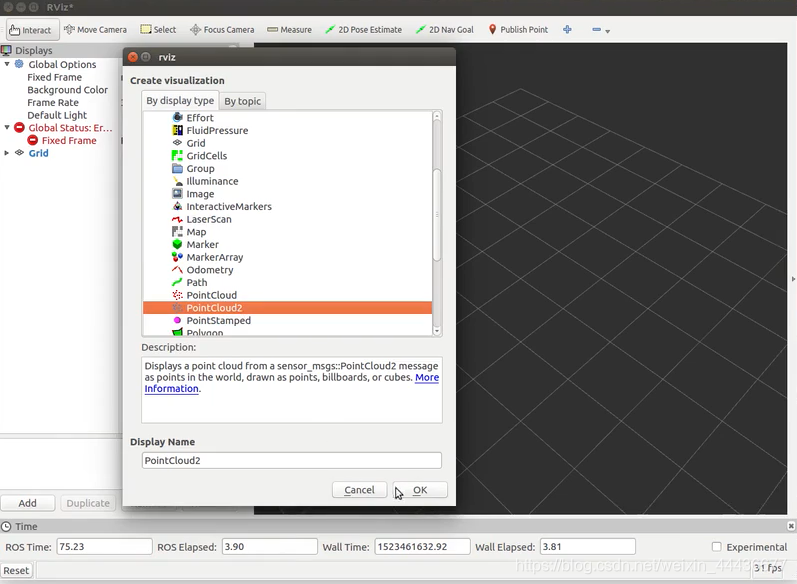
项目运行环境为Ubuntu18.04 、ROS为melodic。 教程学习up主:古月居。https://blog.csdn.net/hcx25909/article/details/8096373 初次学习可下载他的工作区压缩包来运行调试。该博客也是在他的基础上稍作修改运行了自己的模型文件。他的ubuntu为16版本,ROS为kinetic,稍有不同仔细看自己的运行环境哦。 1、camera使用下列命令,运行含有摄像头机器人的view_mbot_with_camera_gazebo.launch文件,打开gazebo,可以看到自己的模型文件和机器人。可以看到代码文件的第三行,后面的xxx.world记得修改为自己的.world文件哦。 roslaunch mbot_gazebo view_mbot_with_camera_gazebo.launchview_mbot_with_camera_gazebo.launch文件内容: 运行下列命令,查看虚拟摄像头。 rqt_image_view修改虚拟摄像头目录为/camera/image_raw。 mbot_teleop.launch文件内容: 整体运行截图如下: 使用下列命令,运行含有rgbd摄像头机器人的view_mbot_with_kinect_gazebo.launch文件。可以看到代码文件的第三行,后面的xxx.world记得修改为自己的.world文件哦。 roslaunch mbot_gazebo view_mbot_with_kinect_gazebo.launchview_mbot_with_kinect_gazebo.launch文件内容: 打开一个新的终端输入下列命令初始化ROS。 roscore再打开一个终端,使用下列命令运行rviz,查看摄像头内容。 rosrun rviz rviz点击左下角的add,添加PointCloud2和Image 。
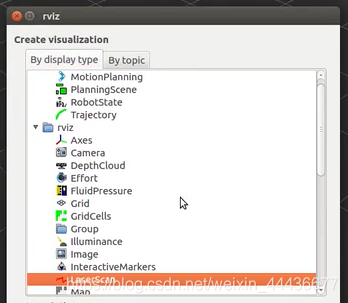
整体运行截图如下: 使用下列命令,运行含有雷达扫描摄像头机器人的view_mbot_with_laser_gazebo.launch文件。可以看到代码文件的第三行,后面的xxx.world记得修改为自己的.world文件哦。 roslaunch mbot_gazebo view_mbot_with_laser_gazebo.launchview_mbot_with_laser_gazebo.launch文件内容: 打开一个新的终端输入下列命令初始化ROS。 roscore再打开一个终端,使用下列命令运行rviz,查看摄像头内容。 rosrun rviz rviz点击左下角的add,添加RobotModel 和 LaserScan。 更改Global Options下Fixed Frame为odom 整体运行截图如下: |
 再打开一个终端,运行 mbot_teleop.launch文件,打开键盘控制节点。可以看到文件提示,通过键盘" u i o j k l m , . " 这九个按钮来控制机器人的运动。
再打开一个终端,运行 mbot_teleop.launch文件,打开键盘控制节点。可以看到文件提示,通过键盘" u i o j k l m , . " 这九个按钮来控制机器人的运动。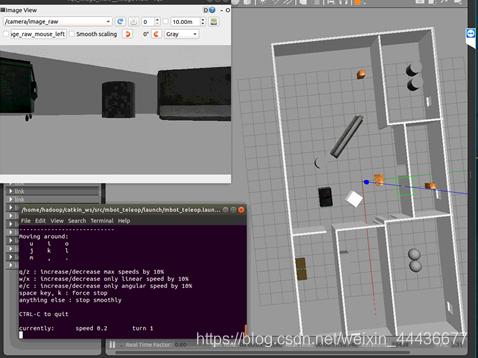
 更改Global Options下Fixed Frame为kinect_link
更改Global Options下Fixed Frame为kinect_link 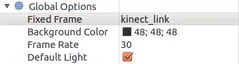 更改PointCloud2下Topic目录为/kinect/depth/points
更改PointCloud2下Topic目录为/kinect/depth/points 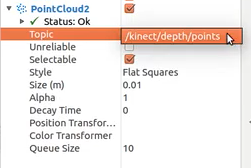 更改Image下Image Topic为/kinect/rgb/image_raw
更改Image下Image Topic为/kinect/rgb/image_raw 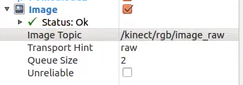 同第1部分,新开一个终端,使用命令roslaunch mbot_teleop mbot_teleop.launch运行 mbot_teleop.launch文件,打开键盘控制节点,使用键盘按钮来控制机器人运动。
同第1部分,新开一个终端,使用命令roslaunch mbot_teleop mbot_teleop.launch运行 mbot_teleop.launch文件,打开键盘控制节点,使用键盘按钮来控制机器人运动。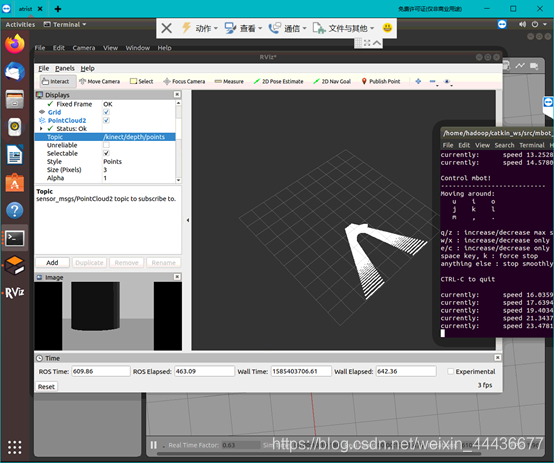
 更改LaserScan下Topic为/sacn 修改Size(m)为0.05可以将激光点变大 一些。
更改LaserScan下Topic为/sacn 修改Size(m)为0.05可以将激光点变大 一些。 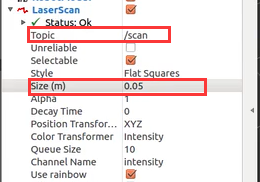 同第1部分,新打开一个终端,使用命令roslaunch mbot_teleop mbot_teleop.launch运行 mbot_teleop.launch文件,打开键盘控制节点,使用键盘按钮来控制机器人运动。
同第1部分,新打开一个终端,使用命令roslaunch mbot_teleop mbot_teleop.launch运行 mbot_teleop.launch文件,打开键盘控制节点,使用键盘按钮来控制机器人运动。
【本文地址】