| STM32 F103C8T6学习笔记18:(串口通信) | 您所在的位置:网站首页 › class1蓝牙模块 › STM32 F103C8T6学习笔记18:(串口通信) |
STM32 F103C8T6学习笔记18:(串口通信)
|
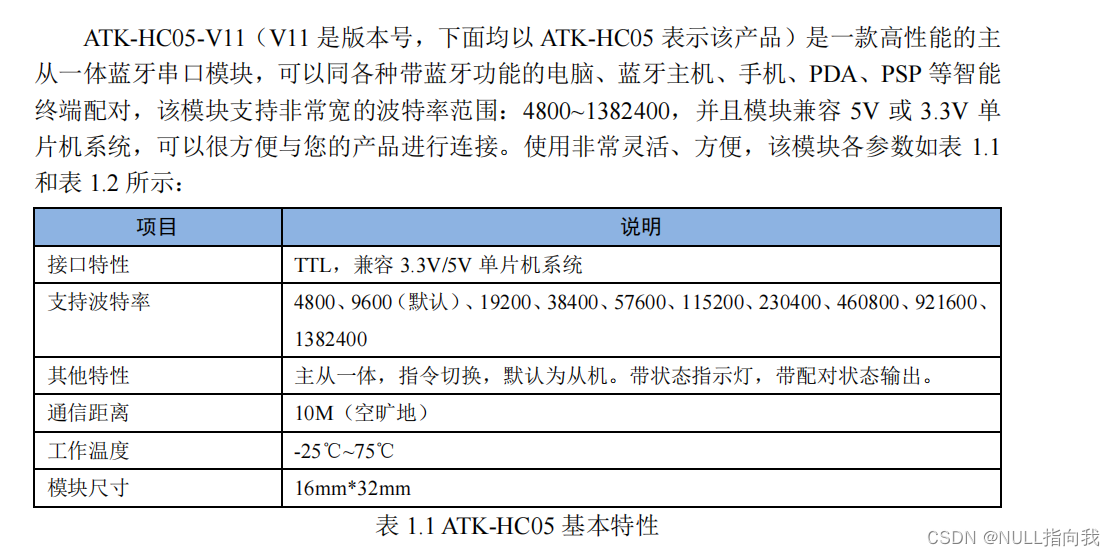
今日学习配置HC-05蓝牙模块 与 STM32 F103C8T6 单片机的通信: 文章提供测试代码讲解、完整工程下载、测试效果图 主要需要用到的知识: 串口通信 目标是配置单片机串口1 与 HC-05蓝牙模块的通信,并借此传送数据打印数据给手机APP 目录 HC-05蓝牙模块: 基本特性: 引脚功能介绍: 模块STA指示灯: HC-05 AT指令集: HC-05蓝牙模块AT预设: 1、连线提示: 2、上位机发送AT指令对模块进行预设: 发送版本查询指令: 查询模块目前的串口配置: AT指令对蓝牙模块进行串口波特率、停止位、校验的配置: AT配置蓝牙模块名称: 编辑 AT配置蓝牙PSWD配对密码: HC-05蓝牙模块与单片机的连接: 测试程序设计: 单片机与蓝牙测试代码: 测试效果图: 整体测试工程下载: HC-05蓝牙模块: 基本特性:默认波特率 9600
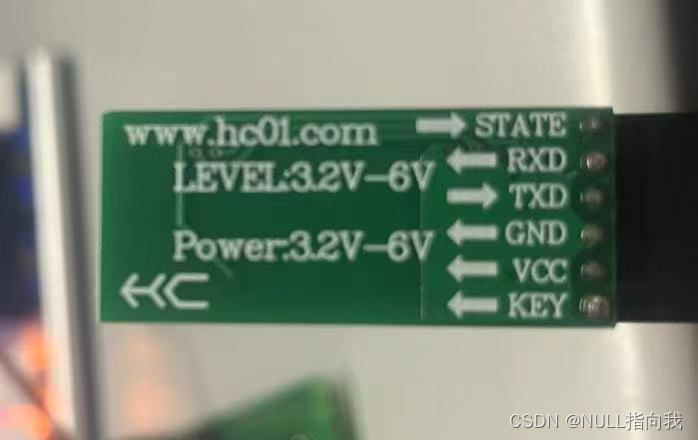
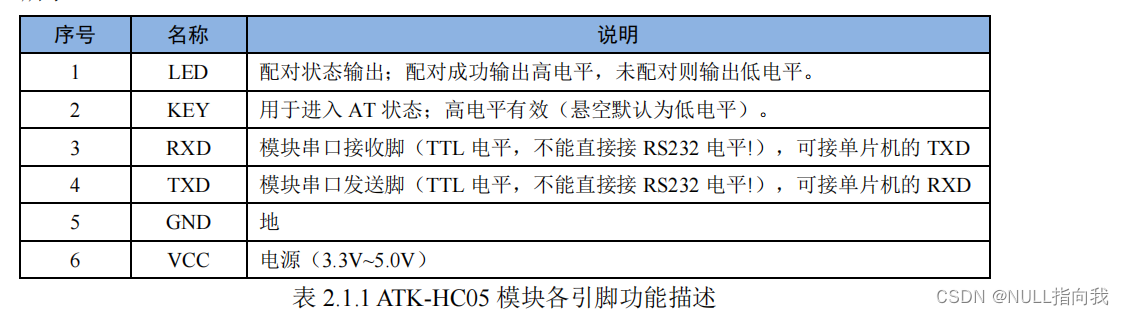
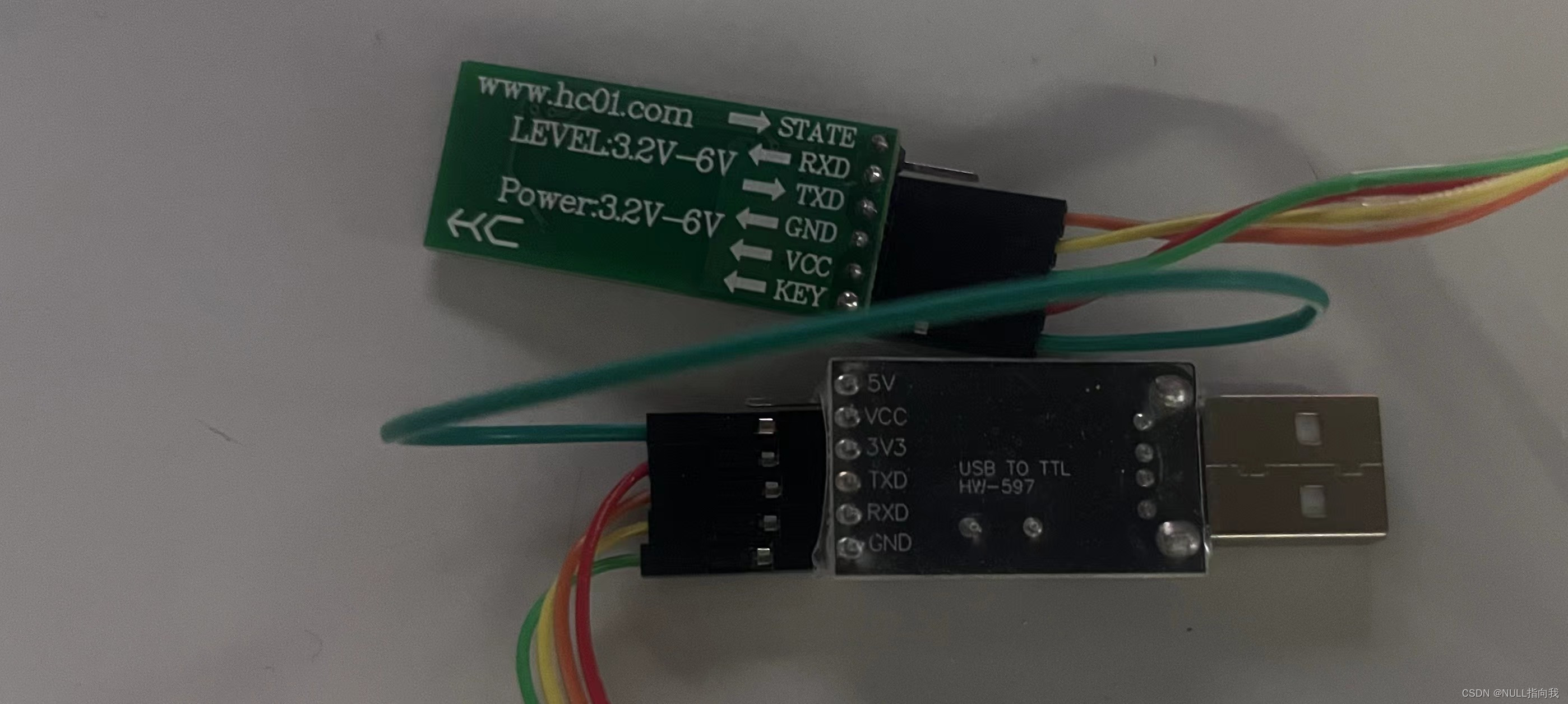
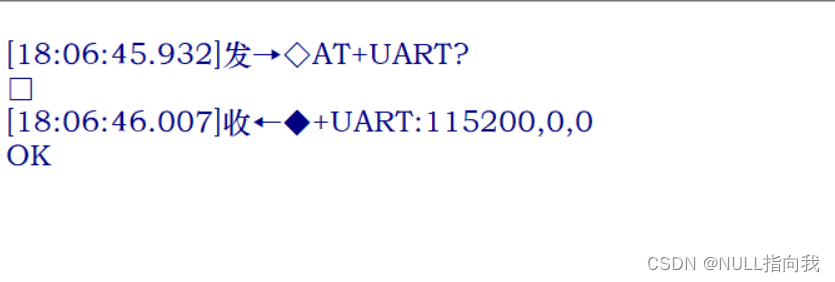
模块自带了一个状态指示灯:STA。该灯有3种状态: ①在模块上电的同时(也可以是之前),将KEY设置为高电平(接 VCC),此时STA慢闪(1秒亮1次),模块进入AT状态,且此时波 特率固定为38400。 ②在模块上电的时候,将KEY悬空或接GND,此时STA快闪(1秒2 次),表示模块进入可配对状态。如果此时将KEY再拉高,模块也 会进入AT状态,但是STA依旧保持快闪。 ③模块配对成功,此时STA双闪(一次闪2下,2秒闪一次)。 有了STA指示灯,我们就可以很方便的判断模块的当前状态,方便 大家使用。 HC-05 AT指令集:模块是通过一个串口TTL接口,既实现AT指令来设置和查询相关参数,同时实现串口数据透传。所以,模块必定有两种模式: 1)AT指令模式 2)串口透传通信模块两种模式通信波特率可能不一样 HC-05蓝牙模块AT预设:我们首先要使用USB 转TTL模块与HC-05蓝牙模块 进行连接,通过PC上位机的串口助手来对它的一些参数进行预设: 有 2 种方法使模块进入 AT 指令状态: 1 ,上电同时 / 上电之前将 KEY 设置为 VCC , 上电后,模块即进入 AT 指令状态。 2 ,模块上电后,通过将 KEY 接 VCC ,使模块进 入 AT 状态。 方法 1 ( 推荐 )进入 AT 状态后, 模块的波特率为:38400 ( 8 位数据位, 1 位停止 位)。 方法 2 进入 AT 状态后,模块波特率和通信波特率一致。 1、连线提示: HC-05蓝牙模块 USB 转TTL模块RXDTXDTXDRXDGNDGNDVCCVCCKEY(进入AT模式用)VCC
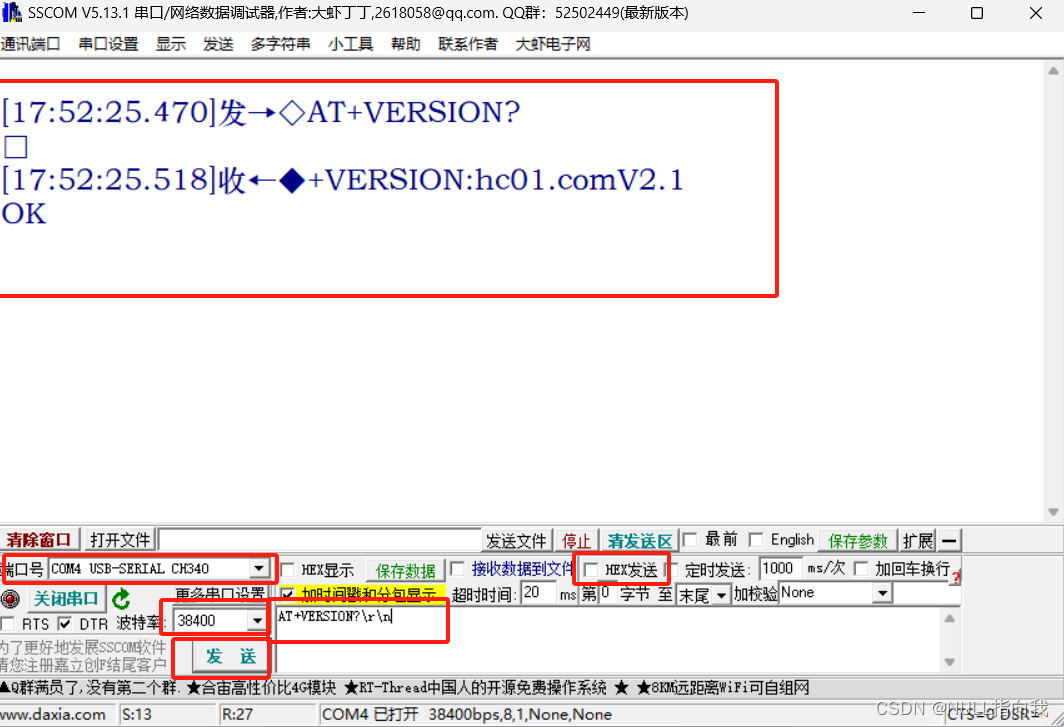
正确反馈如下图所示:
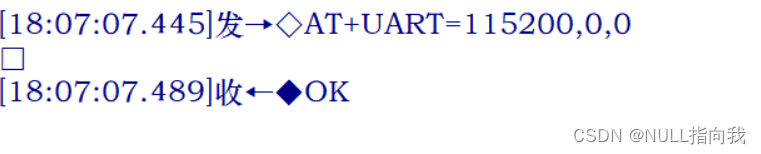
这段指令表示设置波特率为115200,1位停止位,无校验:
配置蓝牙名称为Violet: 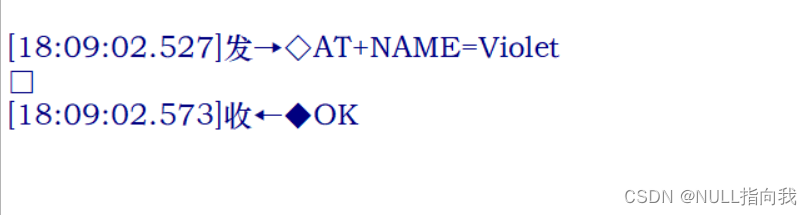 AT配置蓝牙PSWD配对密码:
AT+PSWD=1234\r\n
AT配置蓝牙PSWD配对密码:
AT+PSWD=1234\r\n
这个配对密码只能4位字节长度
经过上文的上位机串口AT指令配置后,我们就不需要让单片机对蓝牙模块进行额外配置了: 因此KEY就不需要连接高电平,可以悬空了:
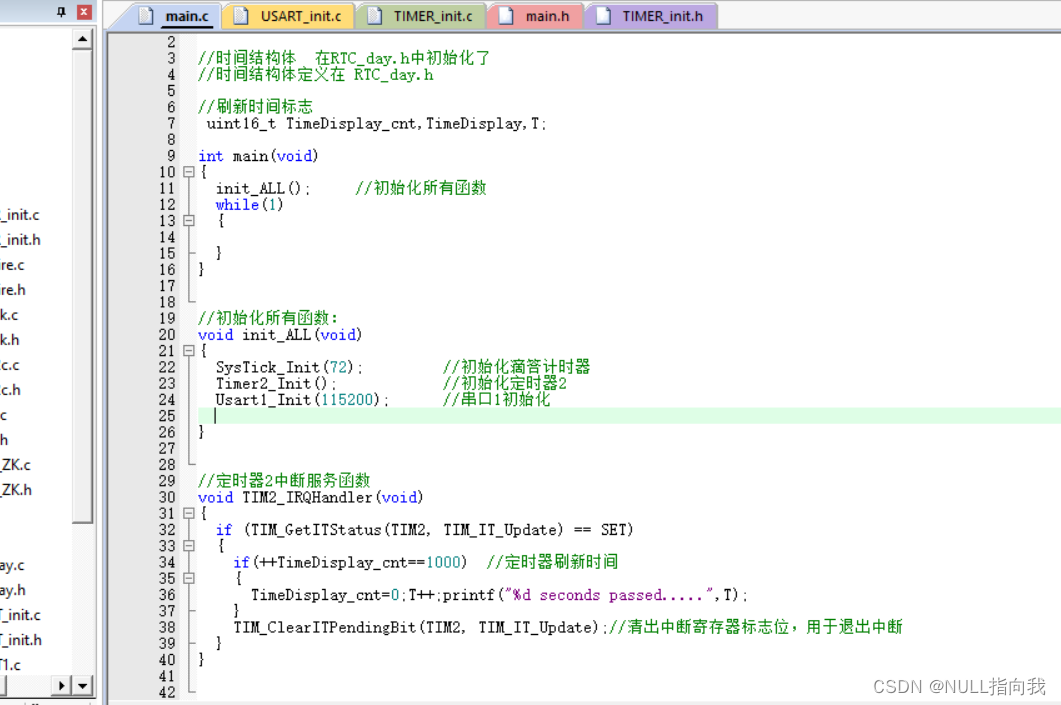
这里蓝牙模块是与STM32的串口1的TXD RXD引脚通信连接的...... 测试程序设计:根据之前的AT指令配置: 蓝牙模块的通信波特率被改为了 115200,1停止位,0校验 并且蓝牙的名称被改为了Violet 蓝牙PSWD配对密码 为1234 这里就尝试设计一个程序:STM32初始化串口1,和一个1s周期定时器,每隔1s发送一次数据给蓝牙模块,然后使用手机连接蓝牙进行测试效果检验: 单片机与蓝牙测试代码:串口1初始化: void Usart1_Init(unsigned int baud) { GPIO_InitTypeDef gpio_initstruct; USART_InitTypeDef usart_initstruct; NVIC_InitTypeDef nvic_initstruct; // 打开串口GPIO的时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // 打开串口外设的时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //PA9 TXD // 将USART Tx的GPIO配置为推挽复用模式 gpio_initstruct.GPIO_Mode = GPIO_Mode_AF_PP; gpio_initstruct.GPIO_Pin = GPIO_Pin_9; gpio_initstruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &gpio_initstruct); //PA10 RXD // 将USART Rx的GPIO配置为浮空输入模式 gpio_initstruct.GPIO_Mode = GPIO_Mode_IN_FLOATING; gpio_initstruct.GPIO_Pin = GPIO_Pin_10; gpio_initstruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &gpio_initstruct); usart_initstruct.USART_BaudRate = baud; //配置波特率 usart_initstruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件流控 usart_initstruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //接收和发送 usart_initstruct.USART_Parity = USART_Parity_No; //无校验 usart_initstruct.USART_StopBits = USART_StopBits_1; //配置停止位 1位停止位 usart_initstruct.USART_WordLength = USART_WordLength_8b; //配置 针数据字长 8位数据位 // 完成串口的初始化配置 USART_Init(USART1, &usart_initstruct); USART_Cmd(USART1, ENABLE); //使能串口 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //使能接收中断 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); /* 嵌套向量中断控制器组选择 */ nvic_initstruct.NVIC_IRQChannel = USART1_IRQn; /* 配置USART为中断源 */ nvic_initstruct.NVIC_IRQChannelCmd = ENABLE; /* 使能中断 */ nvic_initstruct.NVIC_IRQChannelPreemptionPriority = 0; /* 抢断优先级*/ nvic_initstruct.NVIC_IRQChannelSubPriority = 2; /* 子优先级 */ NVIC_Init(&nvic_initstruct); /* 初始化配置NVIC */ }定时器2初始化: //初始化定时器2用作计时中断定时器: void Timer2_Init(void) { TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); TIM_InternalClockConfig(TIM2);//选择哪个中断就写哪个 TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //修改分频,对实际情况影响不大,可以不修改,这里是不分频(可选1~72) TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上对齐模式,同时还有向下对齐,中央对齐模式 TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1; //计数器周期。该参数决定了计数器计数溢出前的最大值。 TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //分频器预分频系数。该参数决定了计数器时钟频率的变化程度。 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //高级计数器需要,不需要用到的直接给0就好 TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); TIM_ClearFlag(TIM2, TIM_FLAG_Update); //用于解决一复位时就先进一次中断的情况 TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //抢占优先级 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //响应优先级 NVIC_Init(&NVIC_InitStructure); TIM_Cmd(TIM2, ENABLE); }定时器中断服务函数: //定时器2中断服务函数 void TIM2_IRQHandler(void) { if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET) { if(++TimeDisplay_cnt==100) //定时器刷新时间 { TimeDisplay_cnt=0;T++;printf("%d seconds passed.....",T); } TIM_ClearITPendingBit(TIM2, TIM_IT_Update);//清出中断寄存器标志位,用于退出中断 } }主函数情况:
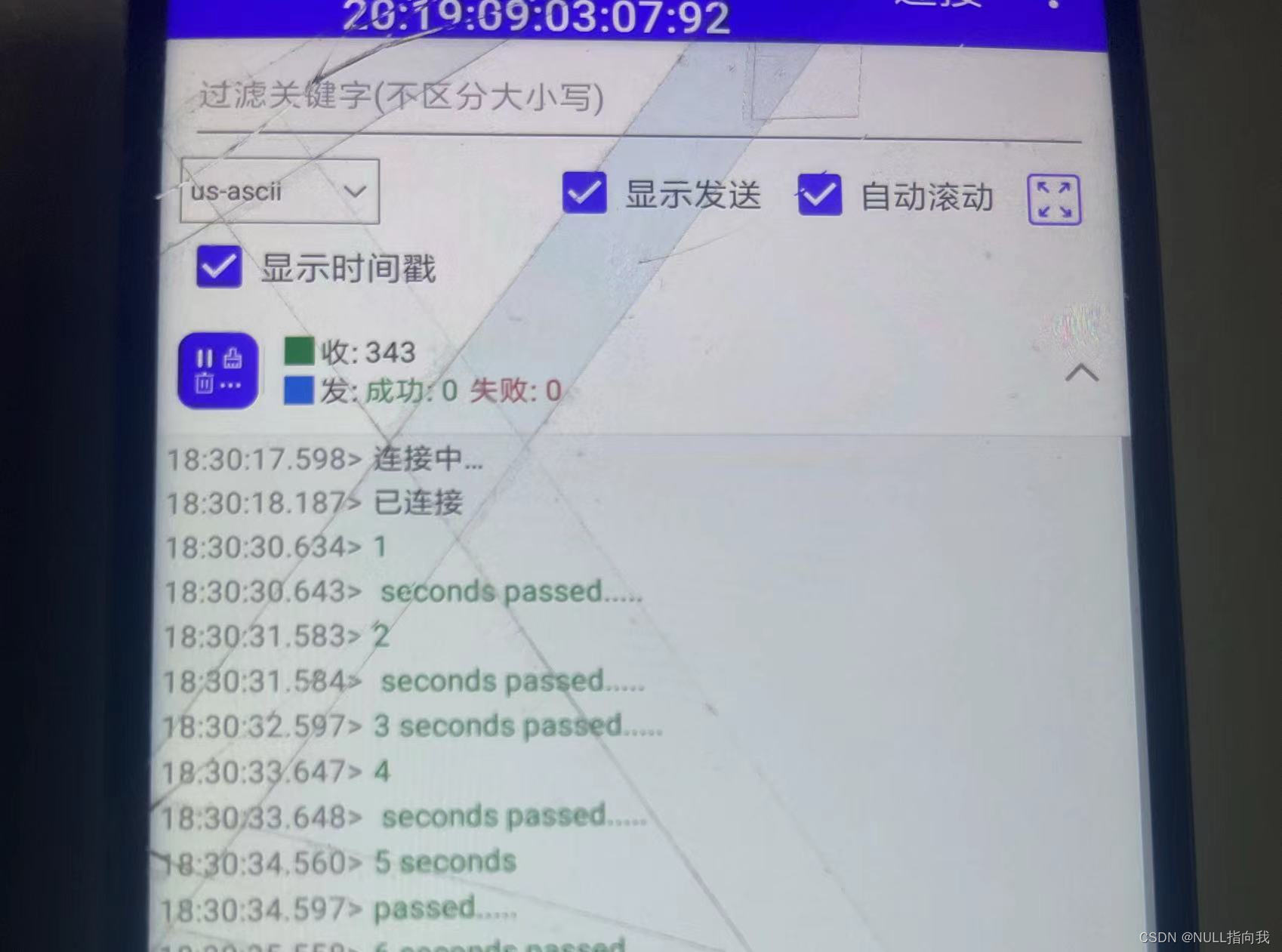
发现串口成功发送了蓝牙的数据到手机APP上(蓝牙调试宝):
https://download.csdn.net/download/qq_64257614/89324005 |


【本文地址】