| 图像处理学习笔记(十四) | 您所在的位置:网站首页 › breakdown歌词sjm › 图像处理学习笔记(十四) |
图像处理学习笔记(十四)
|
本篇文章主要介绍图像边缘锐化的基本方法; 锐化处理的目的是增强边界;图像中的物体的区别是图像的亮度值不同;在边界上反应很大的变化;所以锐化的目的是突出物体的细节,或者增强被模糊了的图像细节; 为了以后边界提取、图像分割、目标识别、形状特征的提取打下基础; 锐化的基本方法: 图像锐化主要靠边界的不同,所以锐化求不同就要求差异,求差异要用减的方法;所以我们用到微分运算; 在微分运算的基础上,介绍梯度锐化和边缘检测; 梯度锐化:保持物体的边界很清晰,使物体的内部数据保留不变,在边缘上增强;除此之外,介绍通用的边缘检测算子,并对这些算子进行比较; 所以本篇文章主要围绕:如何增强边界???怎样提取边界??? 1、增强边界:加强图片中物体的边界,突出边界;不改变物体内部数据量; 2、提取边界:不考虑物体内部信息; 图像边缘类型: 通常,边缘上的灰度变化平缓,而边缘两侧灰度变化比较快,图像的边缘一般是指在局部不连续的图像特征。一般是局部亮度变化最显著的部分,灰度值的变化、颜色分量的突变、纹理结构的突变都可以构成边缘信息; 边缘是有方向性的,一个物体的边缘可能是水平的,也可能是垂直的;只有垂直与边缘的数据量是变化很大的;跟边缘一致的点,变化是很小的;我们不能任意找变化量,必须沿着垂直于边缘的的方向上,才能找到最大的变化量;所以边缘上的变化量是很小的,垂直于边缘的两侧数据量变化很大; 所以要找边缘,就要找数据的变换量,一个方向上的变化量;变化量只能用减法;相邻两个像素的差值; 常见的边缘类型: 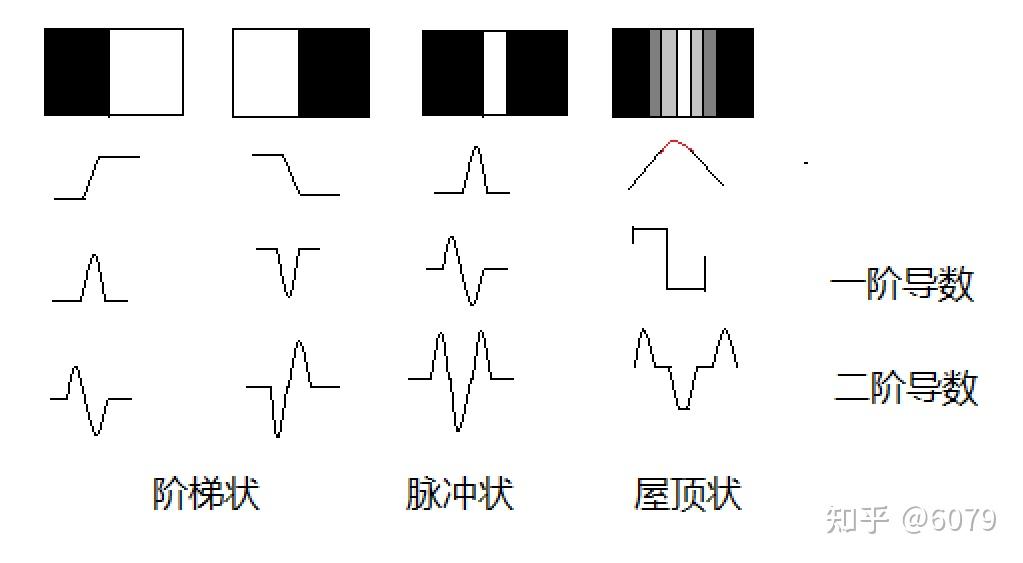 差分特点: 阶梯状:差分在边缘处有最大值;所以一阶导数有最大值;在进行求导,二阶导数是过零的; 脉冲状:一阶导数有最大值、最小值,也有过零; 屋顶状:有一部分是为0,从零到最高,然后到最低; 我们最感兴趣的是恒定灰度区域(平坦段)、突变的开头与结尾(阶梯与斜坡突变)以及沿着灰度级斜坡处的特性。微分运算能够增强边缘和其他突变(如噪声),削弱灰度缓慢变化的区域,微分运算的响应强度与图像在该点的突变程度有关; 因为数字图像是离散的,这里用差分定义微分: 一元函数f(x)一阶微分:  一元函数f(x)二阶微分:  对上面的表达式要构成模板,然后对图像的整个数据进行处理计算; 单向微分运算: 方向竖直微分,G表示微分数据: G(i , j) = f(i , j) - f(i-1 , j)  如上图,从左到右,以第三列为中心,左边为黑,右边为白; 方向水平微分,G表示微分数据: G(i , j) = - f(i , j - 1) + f(i , j) 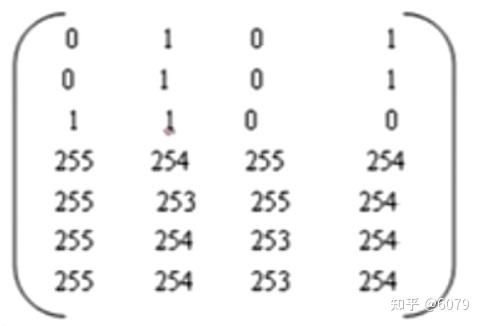 如上图,从上到下,以第三行为中心,上边为黑,下边为白; 双向一次微分运算: 我们要获得即获得水平又获得垂直方向的边界,就要进行双向微分;对图像f在纵方向和横方向两个方向进行微分。该算法是同时增强水平和垂直方向的边缘; 微分之后,把纵方向上的微分取平方加上水平方向上的微分取平方,就是双向一次微分; 因为对于边缘上一点来说,在水平方向上和竖直方向上的微分都为0,所以0的平方相加在开平方还是0;因此这个边缘一点还是0; 微分运算的作用: 1、相减的结果反映图像亮度的变化率; 2、像素值保持不变的区域,相减的结果为0,即像素为黑; 3、像素值变化剧烈的区域,相减后得到较大的变化率,像素灰度值变化差别越大,则得到的像素就越亮,图像的垂直边缘得到增强; 梯度运算: 再求边缘方向时,不知道边缘的方向是什么;梯度是一个矢量,分别沿着X和Y计算;在X方向求一次微分,在Y方向求一次微分,这样就构成了矢量,变化率就叫做梯度; 梯度是矢量,我们需要变成标量,一个可测的量;将X和Y分别取绝对值,直接得到梯度,或者把这两个值取最大值,或者对这两个值,平方在开方;就得到梯度;  交叉微分运算 Robert提出交叉微分运算:不是在水平和竖直方向上求梯度,而是在对角线上求梯度; 比如对于图中Z5求梯度;  Gx和Gy这两个梯度取绝对值,或者平方以后在开方;或者取最大值; sobel算法:  计算Z5的梯度,先给一个模板:下一行数据平均化减去上一行数据平均化的值;下一列数据平均化减去上一列数据平均化的值; 说明是先平滑然后微分; Prewitt算法:  Prewitt算法和Sobel算法的区别是:在模板系数上面; 梯度运算时,用模板卷积运算速度会很快,很方便; 在前面介绍平滑的几篇文章中,模板系数都是正值;而目前的模板有正有负,用来求偏差; 二阶微分: 拉普拉斯算法:  求梯度,有两个方向,对每个方向进行二次微分,求和;我们弄明白位置,知道系数是多少,就可以推导出模板:  在数学中有二阶微分公式  在图像中,我们用卷积的方法实现图像的二维数据的微分; 拉普拉斯特点是中间值比较大,靠近中间值得系数也大; 拉普拉斯运算特点: 1、强调突变,同时弱化慢变。产生一副把浅灰色边线、突变点叠加到暗背景中的一副图像; 2、将原始图像和拉普拉斯图像叠加到一起,保持锐化处理的效果,又能复原背景信息;仅仅求完拉普拉斯变换以后,图像非常暗,因为差分以后,尽可能相同的值,都为黑值了,并且两个值一减整个亮度都降了下来; 如果即想加强边界信息,又想保留物体内部信息,往往用下面这个公式,在原始图像的基础上加上梯度值;对中心系数为负值,就用上面这个公式,正的就用下面这个公式;  带入数值之后,得到下图中底下的公式:  根据公式可以推导出如下模板:  用公式计算,很麻烦;如果用模板的方式来处理图像,很方便,计算很快; 高斯——拉普拉斯算法 高斯——拉普拉斯算法是效果更好的边缘检测器,把高斯平滑器和拉普拉斯锐化结合起来,先平滑去噪,在进行边缘检测; 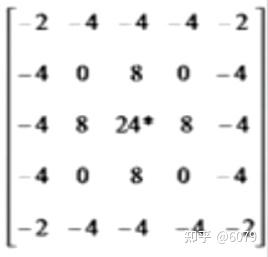 高斯——拉普拉斯模板中心系数很大,距离近的大,距离远的小; 高斯——拉普拉斯算法曲线:  高频提升滤波器 高频就是边界;微分可以求信号的变化率;微分处理后的图像非常暗,不适用; 如果即要保证图像的轮廓清晰,又要保证目标物体的内部灰度不变,就要用到高频提升滤波器; 公式,像素乘以一个系数,然后加上梯度值:  自适应边界检测 采用多个边缘检测算法,不同的检测算法模板采用不同的方向、不同的邻域推导,用卷积方法,计算每个模板,取最大值; 物体的方向有很多,有0°、90°等,我们不知道在哪个方向上取得边界,就可以多个边缘检测算子;比如先看在水平方向有没有边界,然后在看垂直方向,在看45°等等;所以我们需要提供很多方向求方向边界的梯度锐化的模板;哪个模板取得最大值,就认为在哪个方向上是有边界; 实现步骤: 1、将所有边缘模板作用于图像中的每一个像素; 2、产生最大输出值的边缘模板方向; 3、如果所有方向上的边缘模板接近0,该点没有边缘; 4、如果所有方向的边缘模板输出值都近似相等,就没有可靠的边缘方向; Kirsch边缘检测算法: 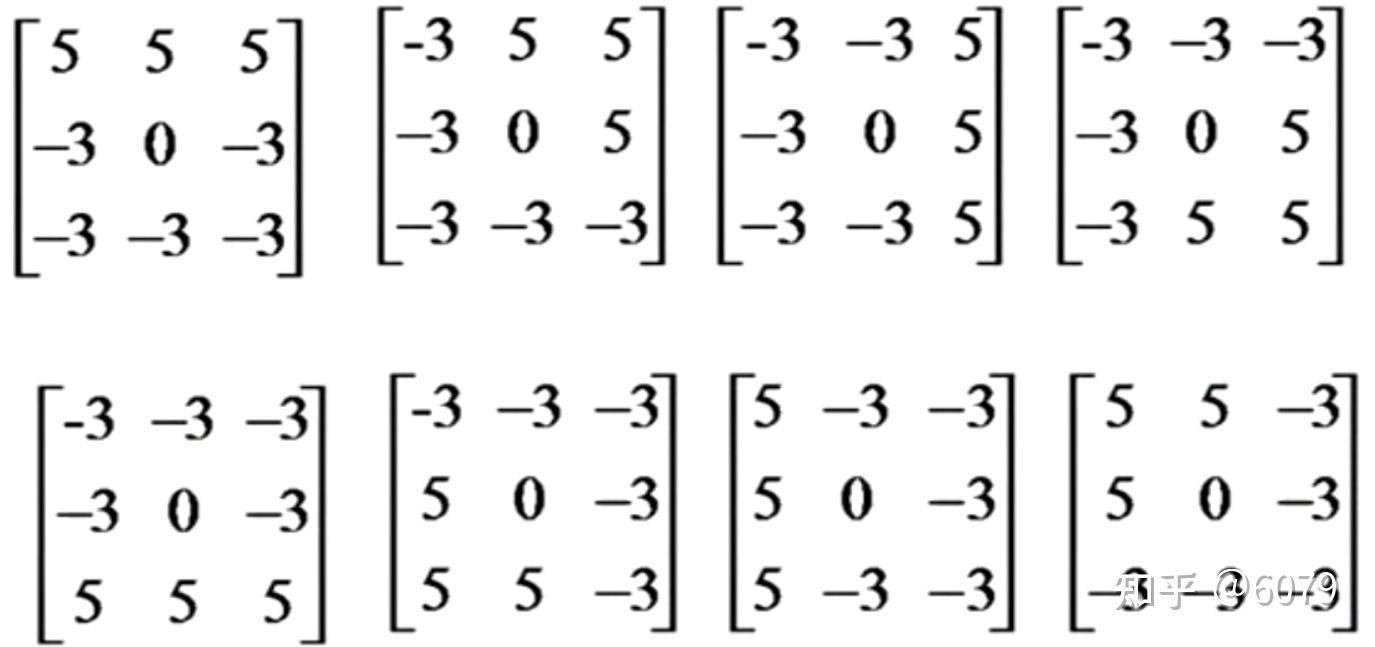 先制定了多个方向上的边缘检测模板;然后求得最大值,取最大值; 锐化算法总结: 好的检测结果:对边缘的错误检测率低,在检测出真实边缘的同时,避免检测虚假边缘; 好的边缘定位精度:标记的边缘位置要和图像上真正的边缘位置尽量接近; 对同一边缘要有低的响应次数:有的算法会对一个边缘产生多个响应,本来只有一个边缘点,可能检测出来多个边缘点,克服噪声的影响; 算法比较: Roberts:对角线相减,定位比较高,但是没有平滑处理,直接减,容易丢失一部分边缘,不具备抗噪声的能力;对陡峭边缘且含噪声少的图像效果较好; Sobel和Prewitt:在系数上会有差异,有一部分做平滑,在做微分运算;平滑的权值有差异,对噪声有抑制能力,但是不能排除虚假边缘;定位效果不好,容易检测出多像素的宽度; Laplacian:不依赖于方向,把两个方向都算了。对阶跃型边缘定位很准,对噪声敏感,使噪声加强,噪声能力差;容易造成一部分边缘检测的方向信息,造成一些不连续检测边缘; 高斯Laplacian:先用高斯函数平滑滤波,然后用Laplacian检测边缘,用来克服Laplacian抗噪声的缺点;但同时也平滑掉比较尖锐的边缘,尖锐边缘无法被检测;是属于低通滤波,通频带越窄,对高斯噪声抑制作用越大,避免了虚假边缘的检出,同时信号边缘也被平滑掉,造成某些边缘的丢失;反之,通带越宽,可以检测到更高频率的细节,对噪声抑制能力下降,容易出现虚假边缘。 所以高斯函数中方差参数的选择很关键,对图像边缘检测效果有很大影响; 有理解错误的请大家指出,一起学习一起进步; |
【本文地址】