| 深度相机 | 您所在的位置:网站首页 › aps相机分为哪几种类型的 › 深度相机 |
深度相机
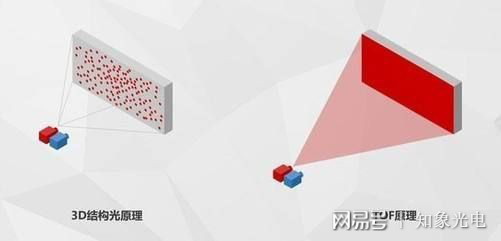
一篇文章助你了解深度相机的技术分类及优劣势。目前市场上常见的深度相机大致可以分为四类:TOF、结构光、被动视觉、其他技术。 几种深度相机技术原理1.TOF TOF深度相机的代表技术有:相位、时间,这两种技术,就是通过计算光线反射的相位差/时间差从而确定深度信息。 2.结构光 结构光深度相机的代表技术有:散斑、掩模、光栅、线激光。 散斑技术原理:随机点阵光斑被三维物体调制。 掩模技术原理:掩模发射结构光。 光栅技术原理:激光被三维物体调制、三角测量原理。 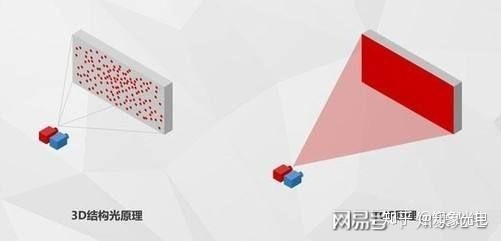
3.被动视觉 被动视觉技术代表技术有:单目、双目两种。 单目技术原理:深度学习和匹配。 双目技术原理:基于视差匹配的三角测量原理。 4.其他 其他技术:光场相机、相控阵、原位投射掩模技术。 广场相机技术原理:利用微透镜整列得到不同深度平面图像。 相控阵技术原理:利用大量单个控制的小型天线单元排列成天线阵面合成不同相位波束。 原位投射掩模技术原理:CMOS表面镀衍射薄膜,根据衍射确定距离。 几种深度相机的优劣势1.TOF TOF技术优势:体积小,集成度极高,成本低。TOF技术劣势:功耗大,分辨率精度提高困难。 2.结构光 结构光技术优势:利用成熟2D Sensor,产品丰富多样,适合不同精度成本。结构光技术劣势:受制于景深和强光限制,远距离不理想。 3.被动视觉 被动视觉技术优势:不受室外光限制,适合不同距离,成本低。被动视觉技术劣势:无特征物体精度较差。 4.其他新技术 优势:有望突破传统技术瓶颈。劣势:量产及成本。 |
【本文地址】
公司简介
联系我们