| 中断程序 | 您所在的位置:网站首页 › abb机器人运动指令有几种 › 中断程序 |
中断程序
|
1. 在做ABB机器人相关项目时,都会用到中断程序。 2. 什么是中断程序?中断程序的作用? 注1:实时监控某种条件的状态,受某种条件触发时程序指针立即进入该程序。 注2:用于实时监控某个条件的状态,例如:用吸盘吸取产品运到时,我们要实时监控吸盘真空反馈状态。 3. 在ABB机器人虚拟仿真工作站里怎样使用中断程序,进入RobotStudio仿真软件,新建工作站,自定义命名为Wuhan91gongkong20190606A,选择点击主菜单双击“新建”,进入主界面,并以自定义命名保存工作站(如下图1.2.3) 新建工作站如下图1: 4.保存成功后,新建机器人虚拟系统,选择虚拟系统的机器人型号(IRB120_3kg_0.58)和本体型号,点击“确定”并调出虚拟示教器:(如下图) 
5. 在虚拟示教器中新建中断程序 5.1点击示教器主菜单 
点击 
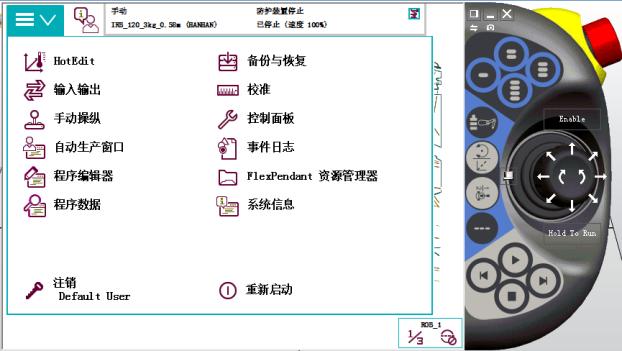
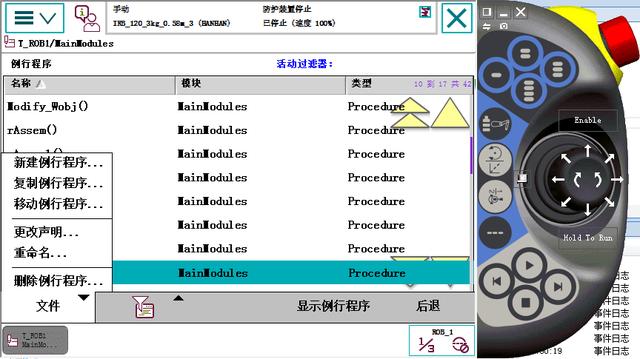
5.2点击示教器“程序编辑器”,点击“例行程序”,点击“文件”选择“新建例行程序” 

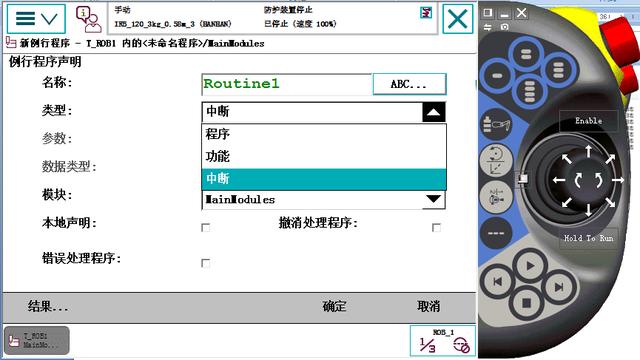
5.3点击“ABC…..”重命名为Trap1,点击“程序”选择“中断” 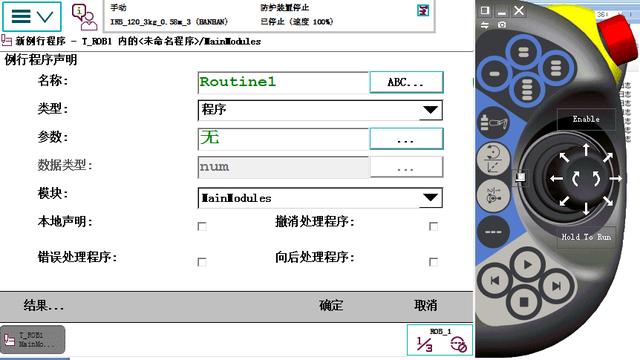
6. 定义变量“中断字符”,编写中断程序 VAR intnum iObjectRD; !定义中断字符 ***示教器程序如下: 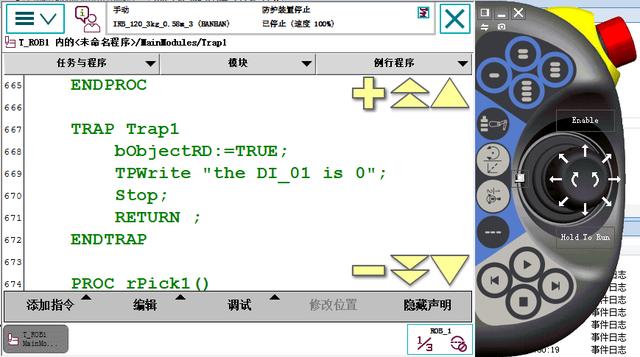
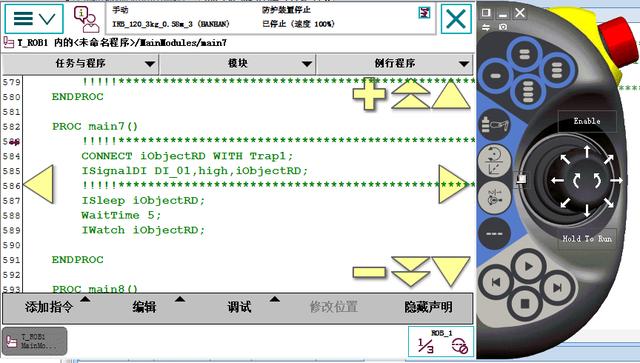
*****RAPID程序如下: 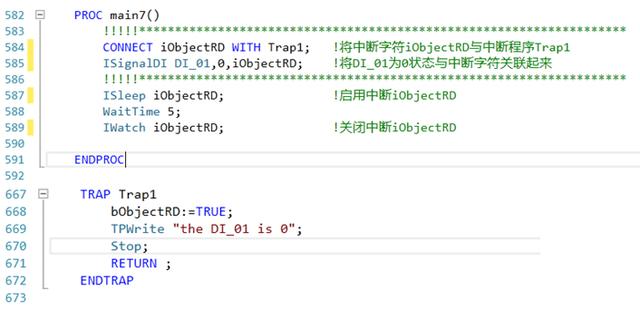
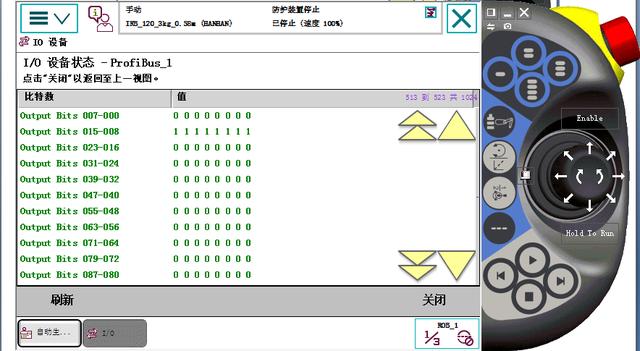
7. 实际演示,在示教器设置pGO_01(占用地址8-15)并下挂在ProfiBus_1,将pGO_01输出为255,再查看ProfiBus_1 
原创:91工控阳屹培 |
【本文地址】
公司简介
联系我们