| 无线传感网络的基本结构 | 您所在的位置:网站首页 › WSN设计要点 › 无线传感网络的基本结构 |
无线传感网络的基本结构
|
WSN的结构 ——重点
不知道无线传感器网络的结构,就相当于你对WSN一无所知。
(1)无线传感器网络节点类型 节点三兄贵: 传感器节点 (Sensor Node)、汇聚节点(Sink Node)和 管理节点。
三个节点的不同要求: 记得曾经有一张图,在一个施工现场,只有一个人在干活,而其他人都是顶着各种头衔职位在旁边站着监督, 传感器节点就是那个干活的人,汇聚节点和管理节点更像是在旁边看着的人,不是说它们没有作用,而只是想说,没有传感器节点这个干活的人,所有的事都是 0 进度。 所以我们不得不对我们的传感器节点更看重一点。 传感器节点: 通常是一个嵌入式系统,这点很重要,一个物体是不会有计算和通信能力,能做的就是嵌入一个“大脑”, 另一方面它一点是电池供电,因为它是不固定的,它不会有持续的、稳定的电源。 所以有限的电源就会限制它的处理能力、存储能力和通信能力。 (这就是灵活的坏处) 可以说,想要让WSN更优化,传感器节点的软硬件是重点。汇聚节点: 因为它少,所以可以对它进行改造,它既可以是传感器节点 2.0 版本,也可以是没有监测功能仅带有无线通信接口的特殊网关设备。 汇聚节点的处理能力、存储能力和通信能力相对较强,它连接传感器网络与互联网等外部网络,实现两种通信协议之间的转换。 同时发布 管理节点 的监测任务,并将 收集到的数据 转发到外部网络中(承上启下)。 WSAN 无线传感器与执行器网络之前我们讲过科学的发展过程, 技术结合就是其中一项,将传感器与执行器结合起来是一个很自然的过程。 Wireless Sensor and Actor Network. 当无线传感网络的控制节点需要通过执行器与外部的物理世界产生交互时,需要给执行器发出指令,执行器将指令转变成一种作用于环境的物理行为。典型的执行器可以是人、控制装置或者智能机器人。随着智能机器人技术的日趋成熟与应用,加快了小型、智能、自治、低能耗、低成本执行器研发的速度,使得无线传感器与执行器网络的建设成为可能。 WSAN由两部分组成:传感器节点与执行器节点 ,它们的区别主要有以下几点: 传感器节点是静态、不移动的,执行器节点是移动的。 执行器节点能够移动,有利于扩大执行器节点作用的有效区域。 典型的执行器可以是移动的机器人, 多个移动机器人可以在传感器节点覆盖的区域内游弋,根据传感器发送的数据来决定机器人如何协作完成控制功能,当然,我们也可以将一个智能机器人同时作为传感器节点和执行器节点。部署在监控区域的传感器节点数量庞大, 而执行器节点则不需要很多, 关键是执行能力。传感器节点是低成本、低功率的设备,它的传感、计算、无线通信能力与能量是受限的,而执行器节点可以根据需要,选用不同类型的执行器来实现不同的控制功能,相对于传感器节点,执行器节点具有与较强的数据处理能力、较高的发射功率和较长的电池寿命。 执行器节点根据多个传感器节点传送的信息来决定如何协作完成控制功能。在传统的无线传感器网络中,传感器节点通过多跳的无线自组网将感知到的数据经由汇聚节点传送到控制节点,而WSAN要求传感器节点与传感器节点、传感器节点与执行器节点、执行器节点与执行器节点之间能够协同通信。 WSAN的主要特点(1)异构性 WSAN是由异构组件组成的,包括低端的传感器节点和处理能力较强的执行器节点,这两部分在网络通信、计算以及存储能力方面有很大的区别。 (2)实时性 WSAN基本上是一种闭环系统,该系统根据传感器传送的数据来进行数据处理、分析和决策,很多应用场合要求执行器节点能够对来自传感器的感知信息提出及时反应,因此网络协议应该提供实时数据传输的保证。 (3)协作性 传感器节点与执行器节点、执行器节点与执行器节点之间必须保持良好的关系,因为可能有多个执行器节点关注同一个事件,传感器节点与执行器节点的协作可以使传感器的事件报告数据被传输到最适合的执行器节点。 受到事件报告数据之后,多个执行器节点相互协作,采取恰当的行动来完成控制任务。 (4)移动性 在WSAN中,执行器节点需要根据发生的事件,移动到相应的位置,执行相应的行动。 WSAN的执行机制

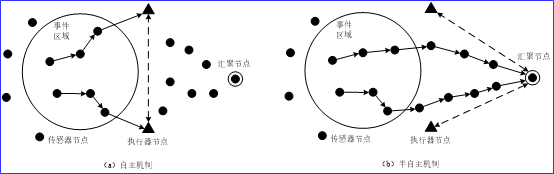
在协同机制中,传感器节点先通过多跳或单跳的方式向执行器节点传送感知数据。执行器节点对数据进行分析后,在采取动作之前,与汇聚节点协商(三种情况): (1)告知汇聚节点,执行器节点要采取的行动(仅告知) (2)与汇聚节点协商应该采取的行动; (3)通过汇聚节点向控制节点请示行动方案。等待指令。 重点问题:在WSAN中,传感器节点与执行器节点协作是研究的重点和难点。 传感器节点与执行器节点的协作涉及三个方面: (1)如何保证传感器节点与执行器节点之间数据传输的低时延性和高可靠性。 (2)在多跳WSAN中,多个传感器节点之间将不同事件上报给一组重叠区域的执行器节点,势必造成大量不必要的执行器节点被激活,从而造成能源浪费, 要将传感器节点与最佳的执行器节点关联起来,必须研究任务分配与执行器节点选择算法问题。 (3)异构的WSAN 网络中,在给定的感知节点与选定的执行器节点之间,应综合考虑可靠性、时延、时延抖动、能量消耗的最佳通信方案。 |

【本文地址】