| PWM控制舵机 | 您所在的位置:网站首页 › STM32设置PWM波的占空比 › PWM控制舵机 |
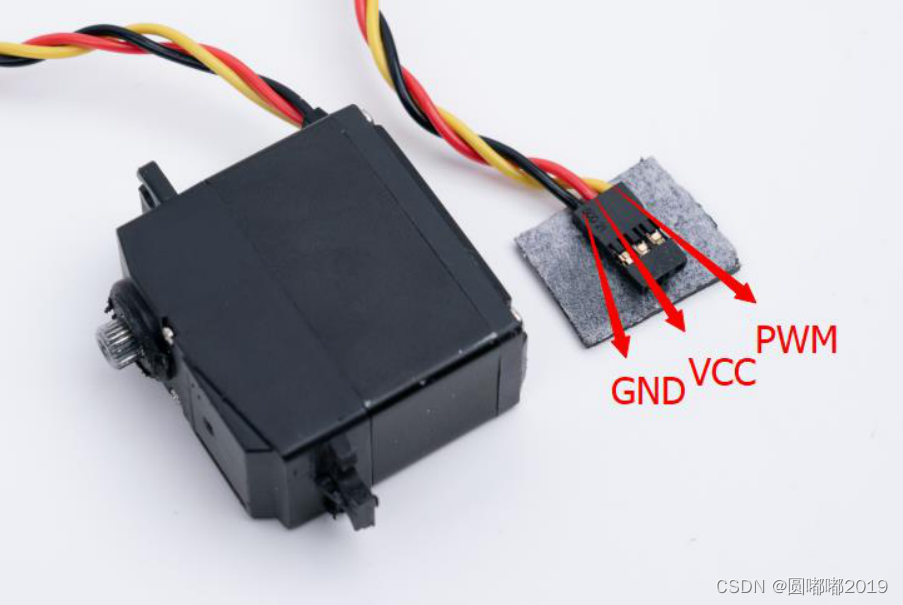
PWM控制舵机
|
文章目录
运行环境:1.1 原理1)A板原理图2)PA8引脚配置3)定时器Timers配置
2.1代码解释1)定时器1初始化函数2)启动定时器中断3)启动PWM/设置占空比4)launch设置5) 编译调试
3.1实验效果
运行环境:
ubuntu18.04.melodic 宏基暗影骑士笔记本 stm32f427IIH6 stlink 9-24v可调电源
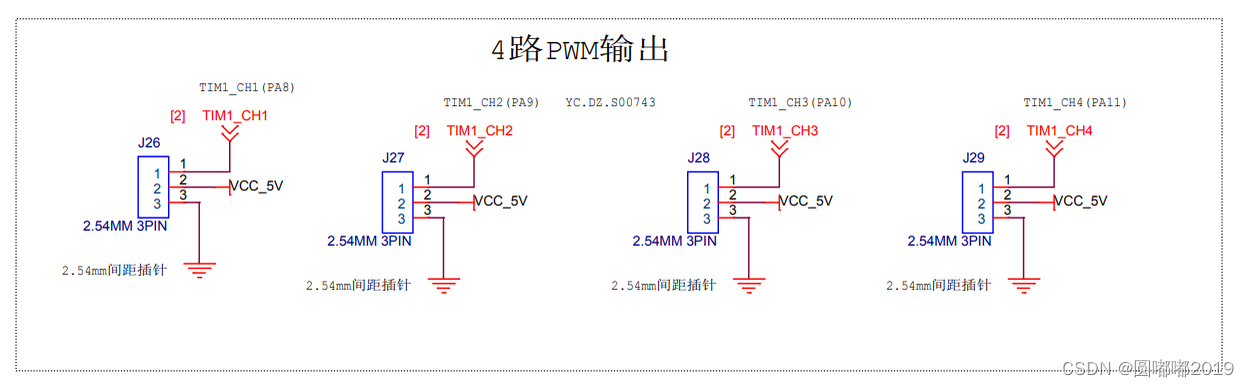
调节占空比来调节舵机的角度 1)A板原理图A板 的PWM由定时器1的1,2,3,4通道
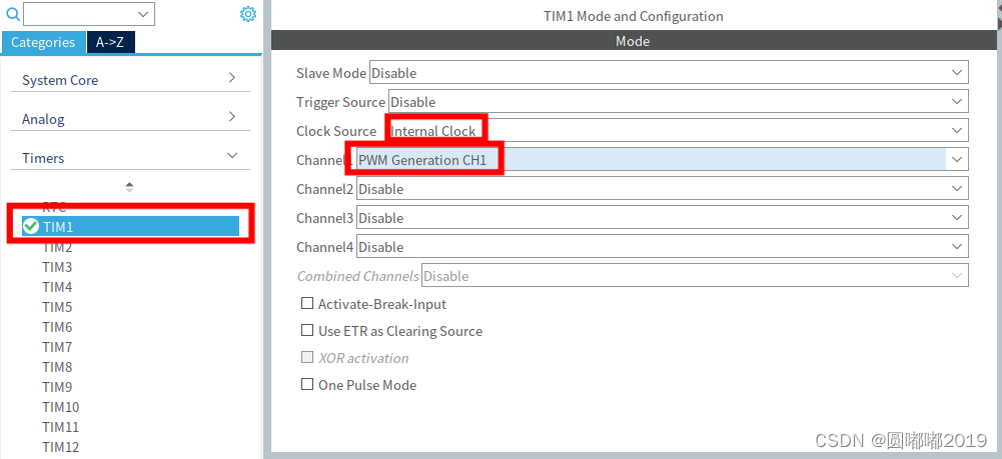
配置为定时器1的第1通道:TIM1_CH1 内部时钟 通道1:PWM模式
脉冲设置为1000 0-1000 输出高电平 1000-65535 输出低电平 平常脉冲设置为0,代码中可以设置
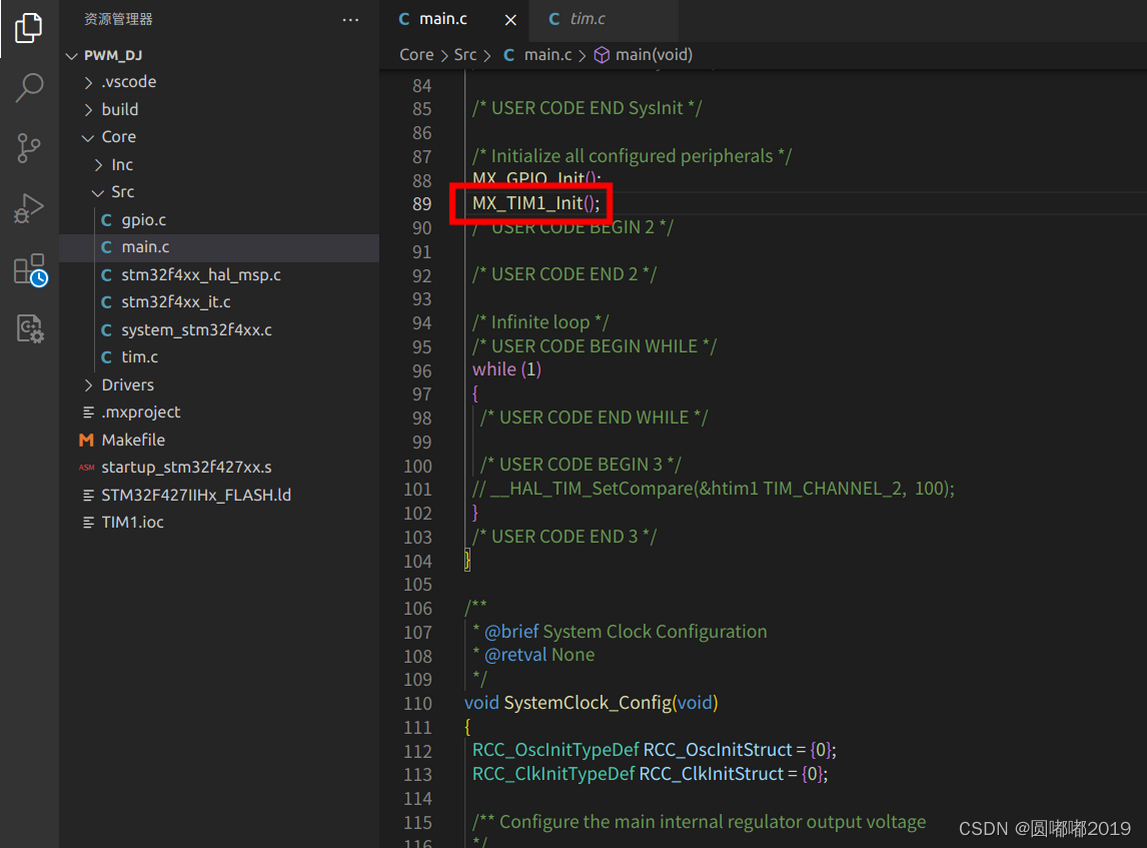
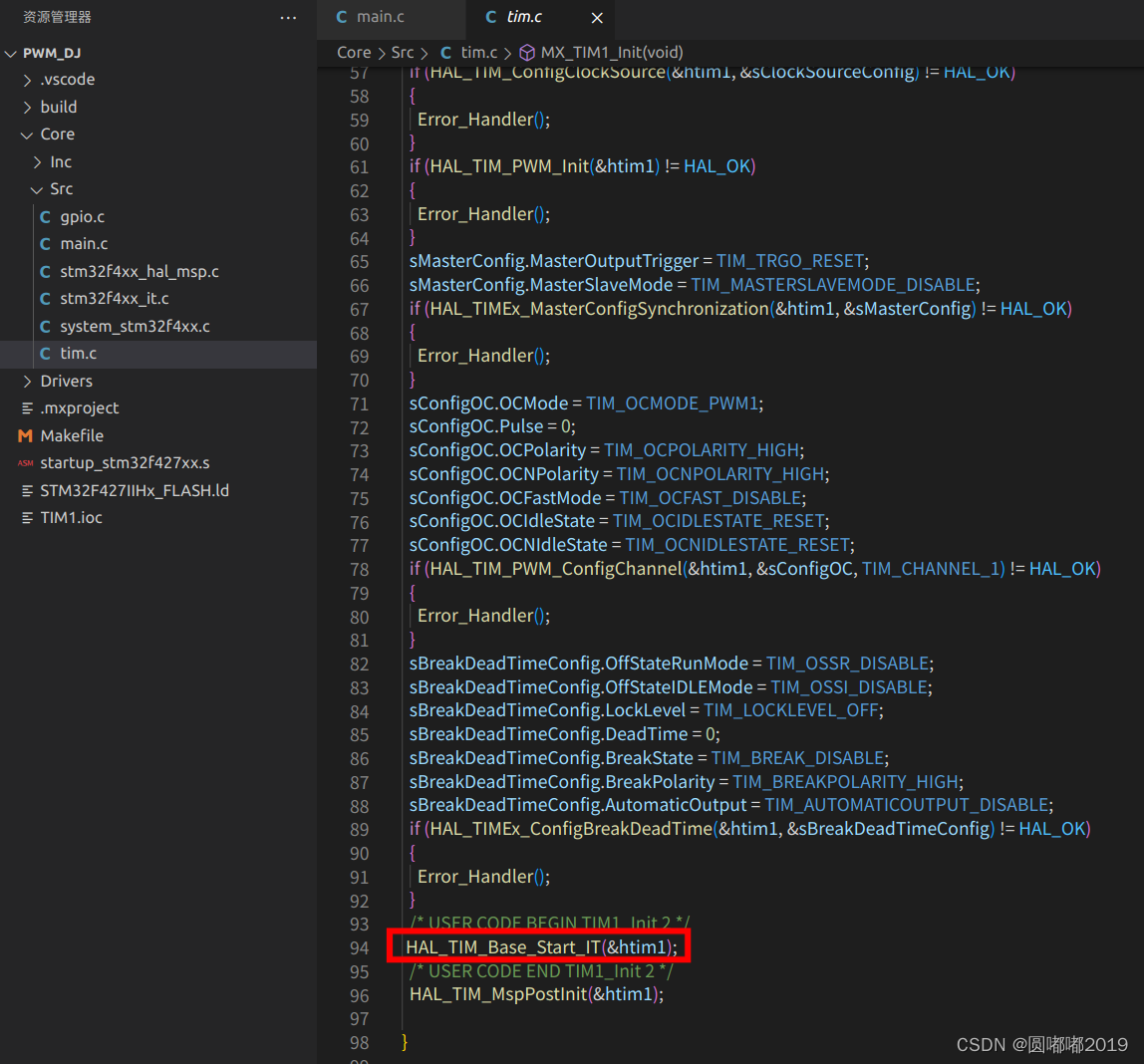
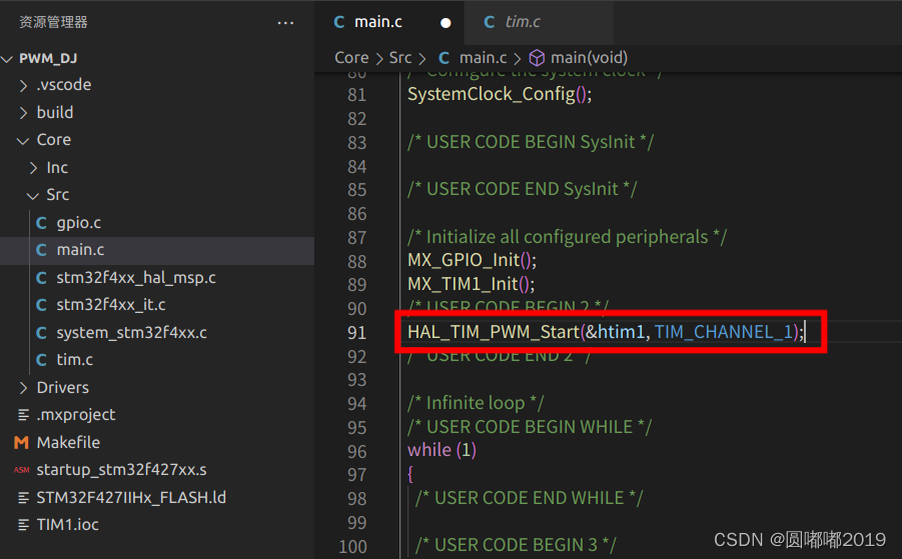
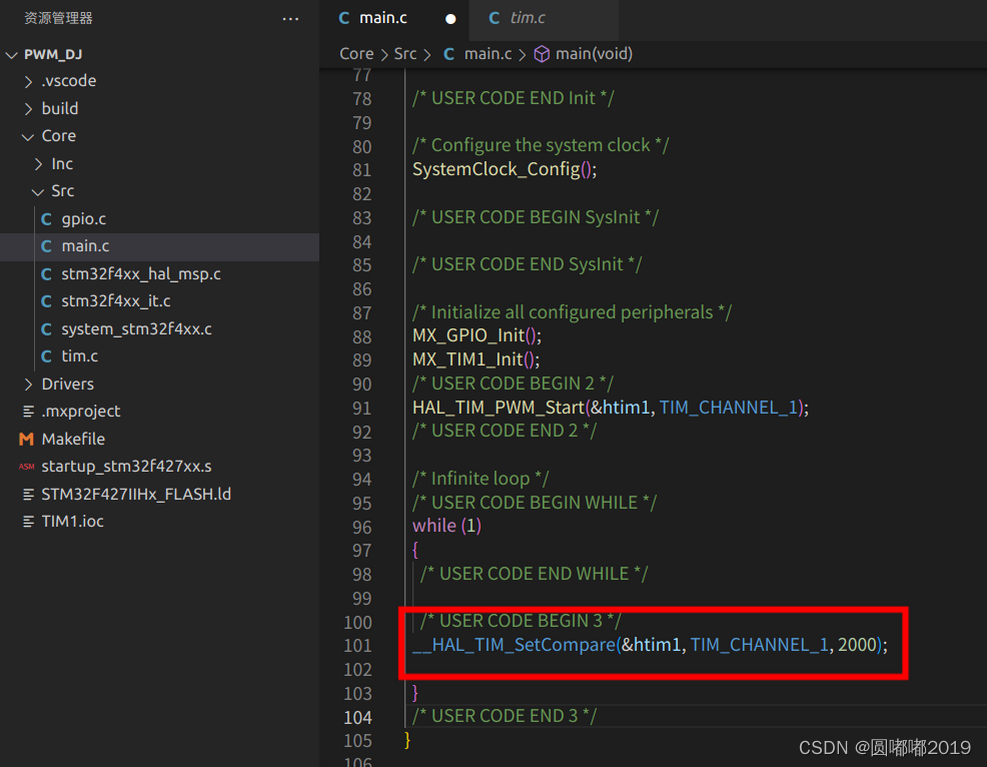
进入定时器1的初始化函数,启动定时器1中断 启动PWM(定时器1的第1通道) 设置占空比 2000–180度 1000–0度
ctrl +s 保存 make F5 编译调试 3.1实验效果通过调节占空比调节舵机角度 ⭐⭐⭐ 嘟嘟崽 ⭐⭐⭐ ⭐⭐⭐ 祝你成功 ⭐⭐⭐ |
 TIM1_CH1对应PA8
TIM1_CH1对应PA8 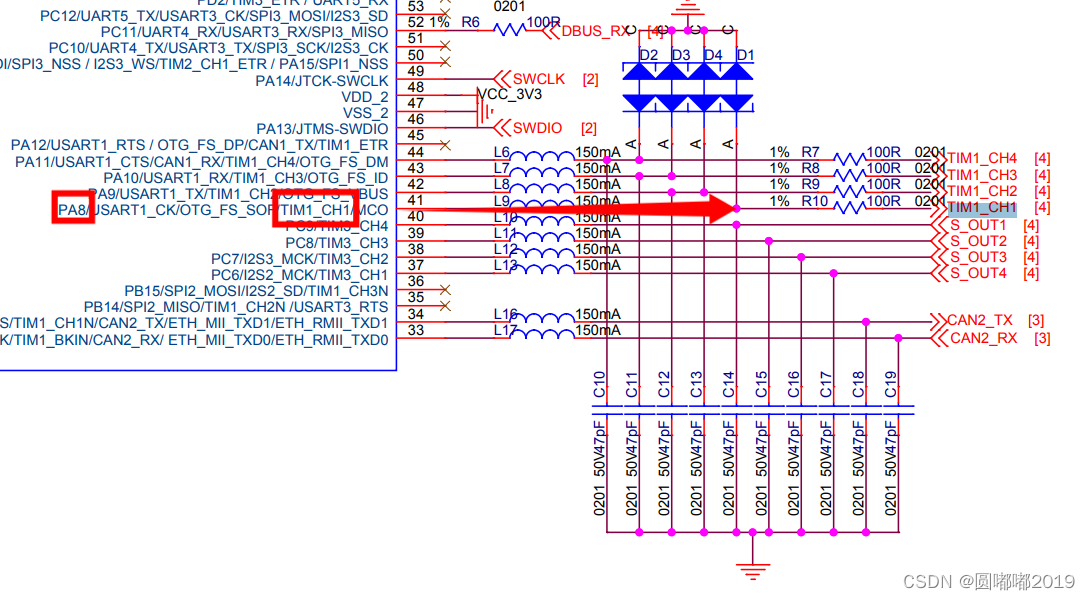

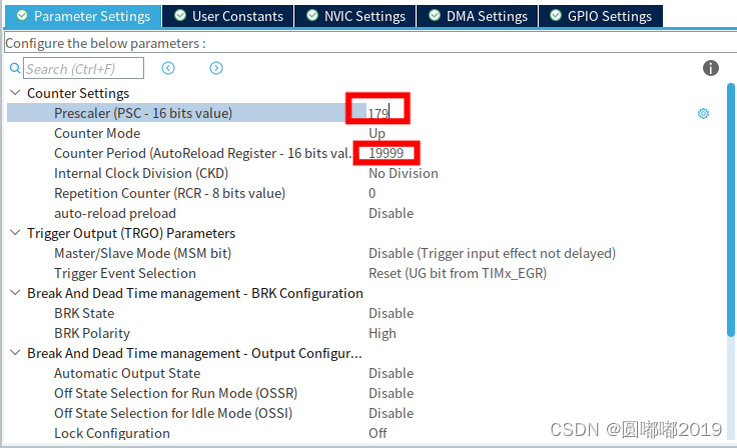 180 000 000 /180分频 = 1000 000 (180-1=179) 1000 000 / 50Hz = 20000 (20000-1=19999)
180 000 000 /180分频 = 1000 000 (180-1=179) 1000 000 / 50Hz = 20000 (20000-1=19999)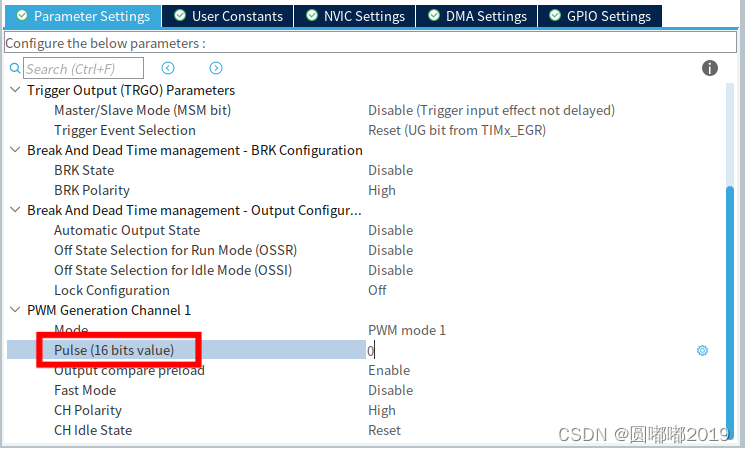
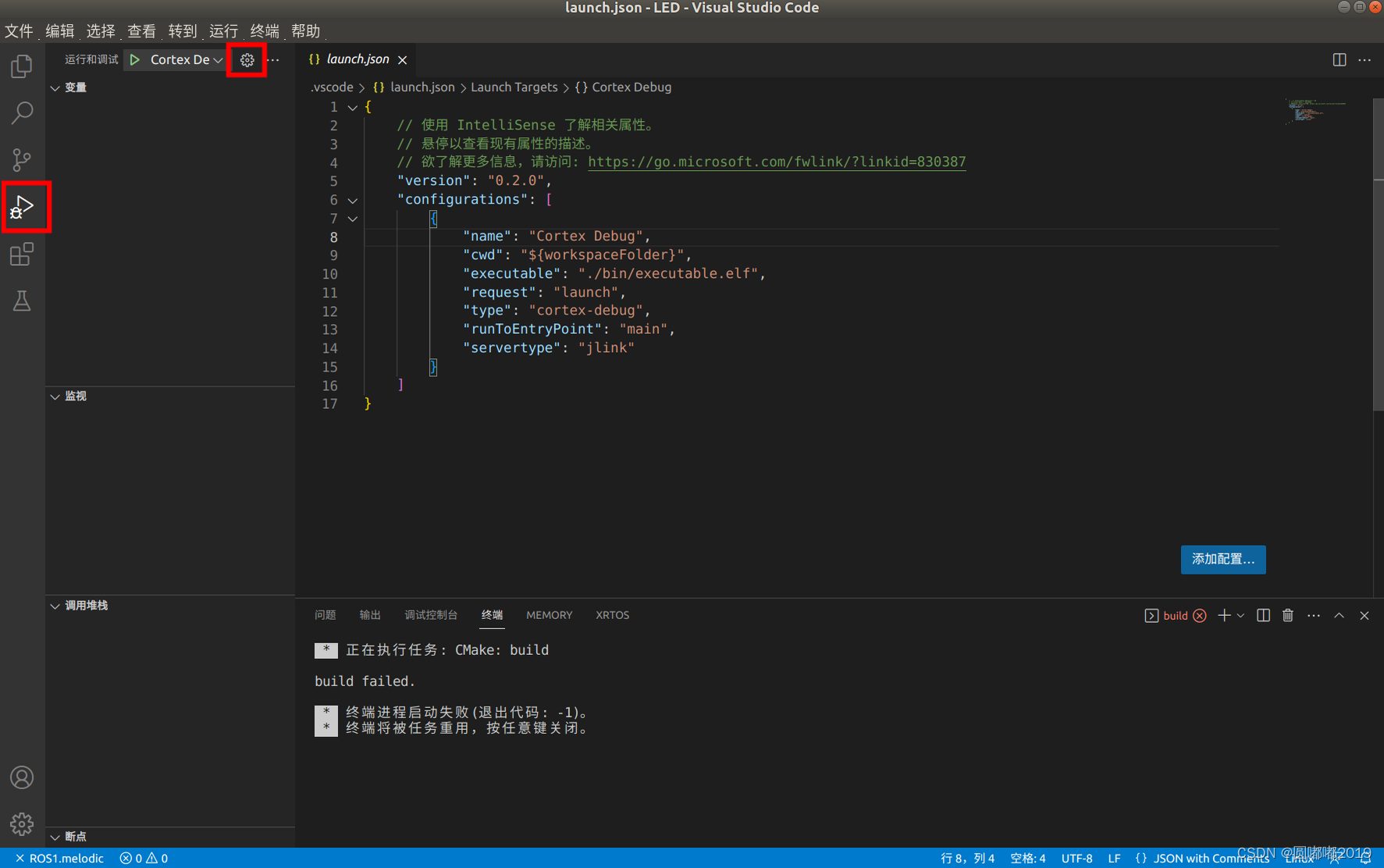 修改成以下内容:可执行文件名是TIM1.elf
修改成以下内容:可执行文件名是TIM1.elf【本文地址】
公司简介
联系我们
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |