| 仿生象鼻机械臂的创新设计与应用研究 | 您所在的位置:网站首页 › Arena仿真的创新点 › 仿生象鼻机械臂的创新设计与应用研究 |
仿生象鼻机械臂的创新设计与应用研究
|
前 言 本作品为本人与学校导师,以及带领几位志同道合的同学,一起头脑风暴,研究定论,并最后落实制作的一个仿生机械学领域的作品,同时也携带作品参与了第十届(2022年)全国大学生机械创新设计大赛-广东省分赛区。 本作品是聚焦于野生大象以象鼻为主仿生设计的多功能协作机械臂。灵活且结实的象鼻能够让大象轻而易举的进行取食、拾取等动作,为我们工程设计带来了启发,也是作品结构的主要灵感来源,在自然界中,象鼻是生物多样性领域进化中最好的自然作品。该作品作为一种连续型机械创新产品,利用特制气囊的弹性变形使柔性本体弯曲成光滑连续曲线而产生运动,与单自由度关节和刚性连杆构成的传统工业机器人不同,它能够形成柔顺的卷曲形状,实现360度的大弯曲效果,从而适应在多障碍物的复杂环境下工作,体现良好的操作顺从性和高度的运动灵活特性。 此外,本作品的鼻端处可以提供各类应用方案,可搭载和更换各种数字技术、智能技术、物理功能的末端执行器,如气动机械手、焊枪等,可以应用在工业制造业、农林业、消防安全领域、医疗服务业,甚至军工航天等领域。
目 录 一、研制背景 1、设计目的 2、作品简介 3、象鼻构造 二、机构的设计与原理 1、机构各系统的设计方案 1)仿生象鼻体的骨架结构设计 2)仿生象鼻肌肉的气动系统 3)模拟象鼻喷洒水液的液体喷洒系统 4)象鼻鼻端的智能与数字技术应用模块系统 2、仿生象鼻运动过程 3、工作流程图 三、性能的分析与计算 1、气动系统元器件的选型 2、仿生象鼻骨架结构参数确定 四、创新点与推广价值 1、主要创新点 2、推广价值 五、机构动作实拍照片 六、参考文献 ======================================================== 一、研制背景 1、设计目的 在如今技术飞快发展的时代,自动化技术已经进入到了人们的生活当中,仿生机械技术是机器人技术与生物力学相结合的新技术。这种技术可以代替人们去完成一些高危险工作、高精度操作以及人们无法进入的区域进行探索等等,所以研究仿生机械技术具有着重要意义。 根据我们团队的研究与甄选,选定了动物界中多样性领域进化中,灵活且结实的大象象鼻。在面对复杂环境的各类需求与各领域高科技场景时,仿生机械设备需要更高冗余度要求、更优的能量策略、更灵活的运动性能,因此设计了基于单片机的仿生象鼻机械臂。 2、作品简介 本作品是聚焦于野生大象以象鼻为主仿生设计的多功能协作机械臂。灵活且结实的象鼻能够让大象轻而易举的进行取食、拾取等动作,为我们工程设计带来了启发,也是作品结构的主要灵感来源,在自然界中,象鼻是生物多样性领域进化中最好的自然作品。该作品作为一种连续型机械创新产品,利用特制气囊的弹性变形使柔性本体弯曲成光滑连续曲线而产生运动,与单自由度关节和刚性连杆构成的传统工业机器人不同,它能够形成柔顺的卷曲形状,实现360度的大弯曲效果,从而适应在多障碍物的复杂环境下工作,体现良好的操作顺从性和高度的运动灵活特性。 此外,本作品的鼻端处可以提供各类应用方案,可搭载和更换各种数字技术、智能技术、物理功能的末端执行器,如气动机械手、焊枪等,可以应用在工业制造业、农林业、消防安全领域、医疗服务业,甚至军工航天等领域。
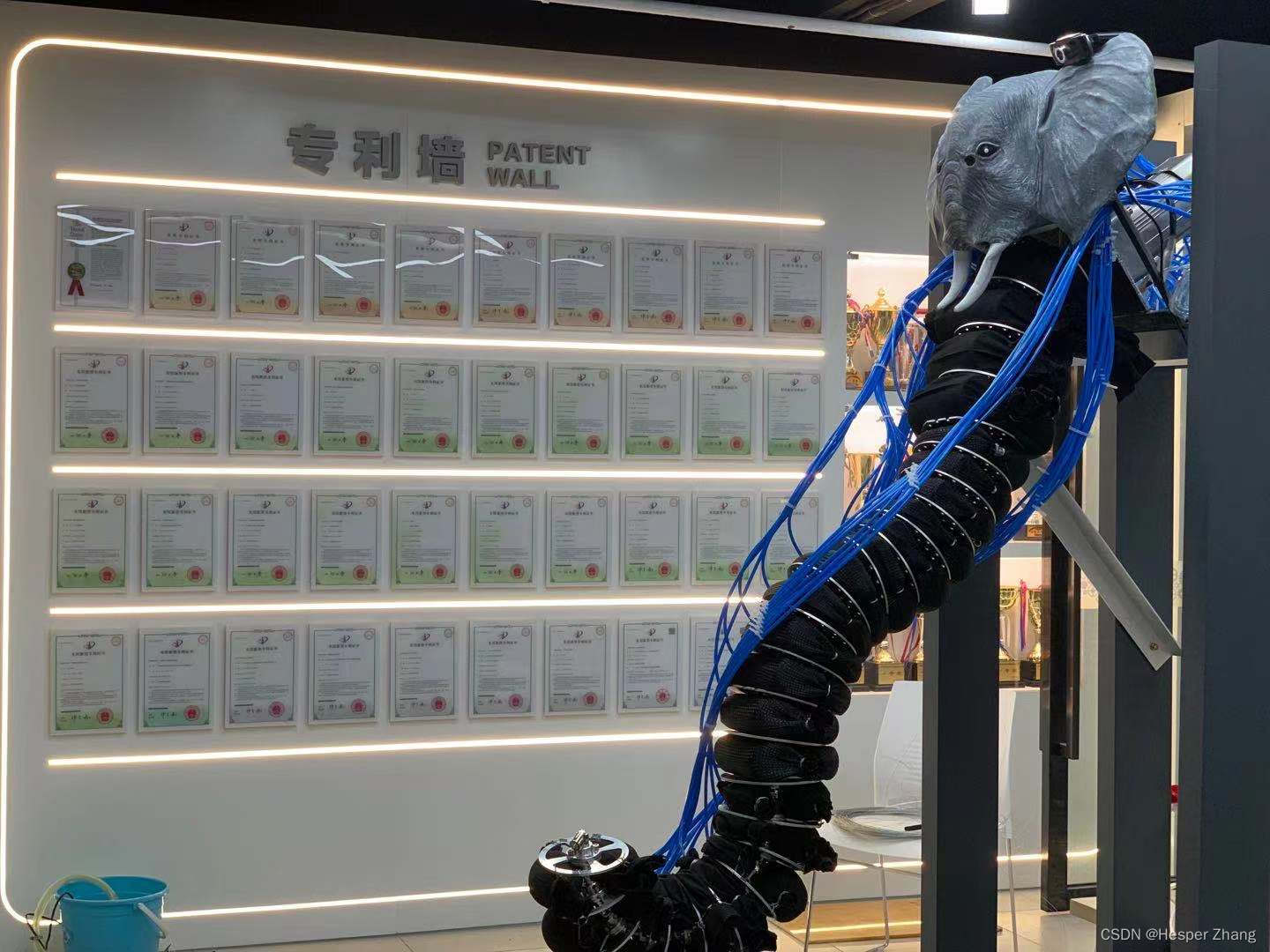
图1.1 仿生象鼻实物图 3、象鼻构造 大象的长鼻子是一个功能发达的肌肉液压调节器(Muscular Hydrostat),其活动十分灵活,几乎可以进行无限自由度的移动。象鼻既能操纵如一片草一样的细小物体,又能携带重量超过250公斤的重物。除此之外,还有社交和感觉功能等等。象鼻这些特殊性也是我们所研究的部分。
图1.2 大象象鼻剖面图 二、系统的设计与原理 本作品在结构设计上有三大部分: (1)仿生设计部分:以野生大象的象鼻为主体的仿生设计; (2)技术功能模块:以智能技术与数字技术为主体的拓展模块可以根据客制化需求进行调配; (3)动力控制部分:气泵和电机是本系统的主要动力来源。 设计方案大纲如图2.1所示。
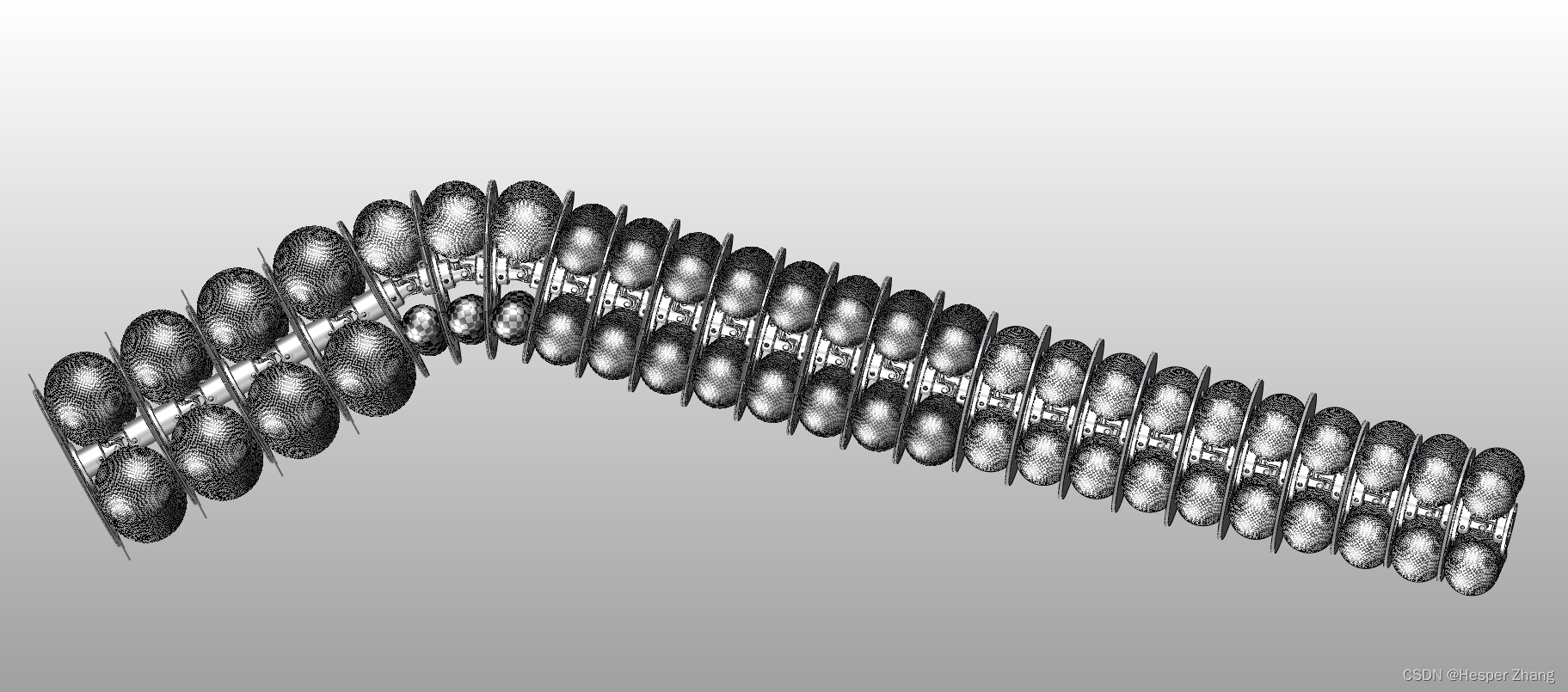
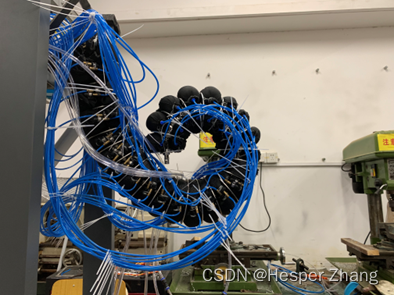
图2.1 设计方案大纲 1.机构各系统的设计方案 1)仿生象鼻体的骨架结构设计 该仿生象鼻结构是连续关节体的设计,由铝合金圆盘与定制万向节通过法兰盘连接,并且不同分段处的细节尺寸有所不同,以呈现气动结构上的不同功能作用与外观上的由粗至细的渐变效果。 该部分分段设计,不同段的组件与结构也有不同,下图2.1.1是象鼻内部结构的三维模型图:
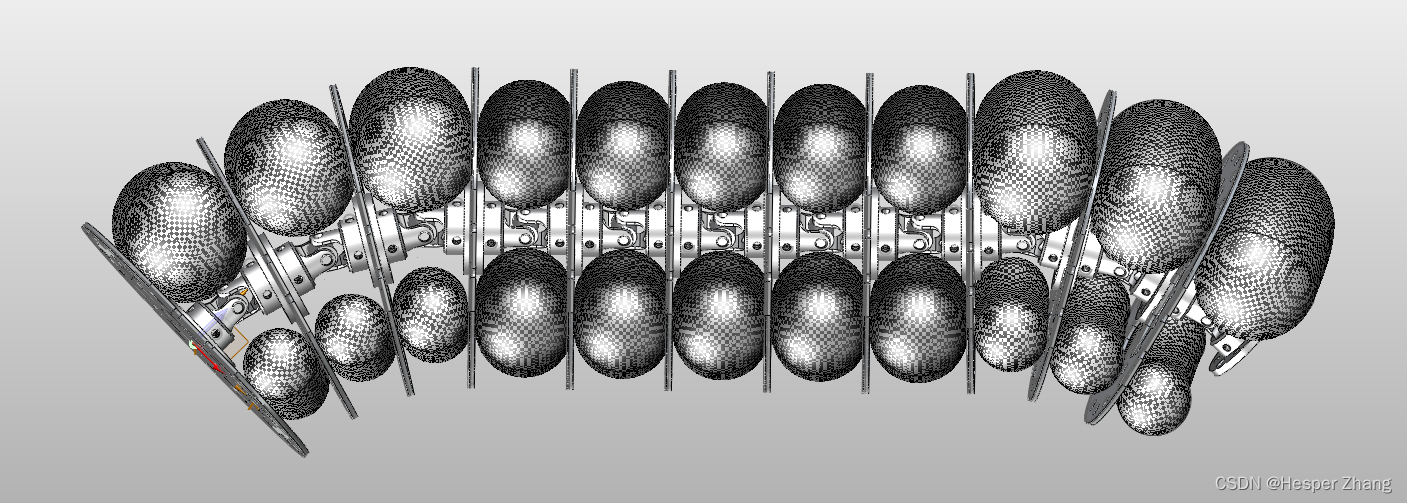
图2.1.1 小关节弯曲图 仿生象鼻其中一段的三维模型装配图2.1.2示:
图2.1.2 未充气气囊状态 仿生象鼻在弯曲时的效果图2.1.3示:
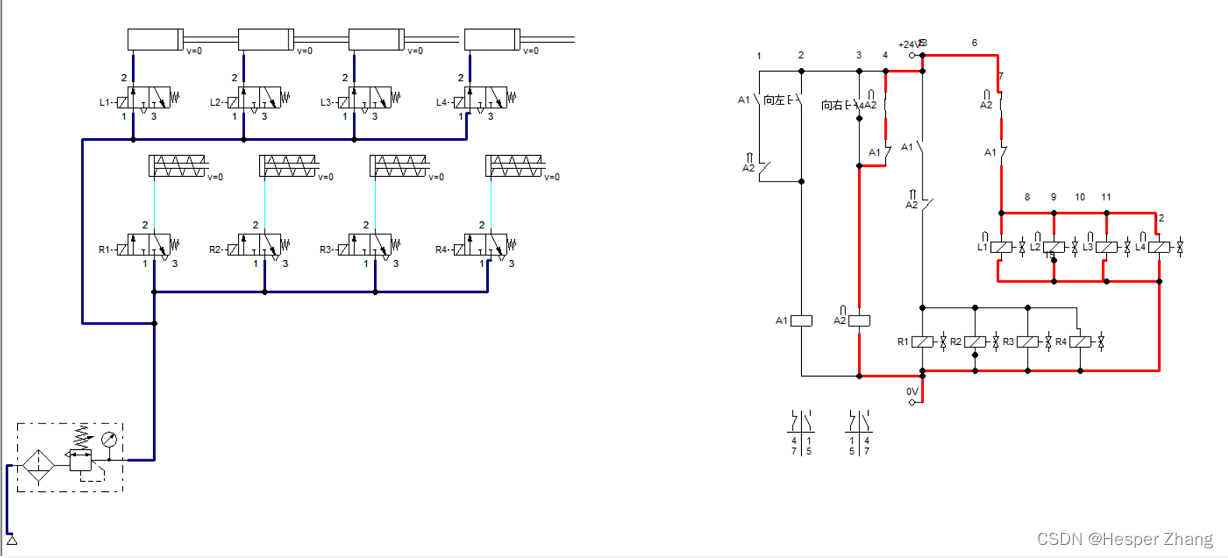
图2.1.3 鼻身根部与前端充气状态 2)仿生象鼻肌肉的气动系统 目前气动伺服控制主要采用电气比例阀和电磁开关阀,电气比例阀具有控制精度高,线性程度好等优点,但是电气比例阀的结构复杂,且价格比较昂贵,难以普及;相反,电磁开关阀的结构简单,价格低廉,使用十分方便,开关的速度较为灵敏。所以,使用成本比较低的电磁开关阀代替电气比例阀来控制气囊,达到所想要的效果。如下图2.1.4,为本作品的气动原理简图。
图2.1.4 气动原理简图 3)模拟象鼻喷洒水液的液体喷洒系统 为仿生出大象在日常中会使用象鼻进行喷水的生物功能,本作品在下方的空间增加了一个可以储水的一个蓄水池,使用水管与花洒头进行搭配,使得喷出的水能够呈现散状,从而模拟象鼻喷洒水液的功能
图2.1.5 模拟象鼻喷洒水液
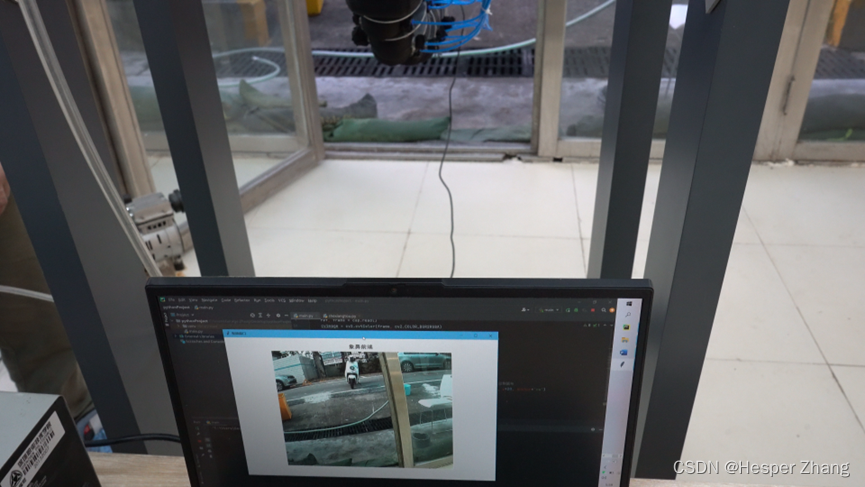
4)象鼻鼻端的智能与数字技术应用模块系统 本作品的象鼻鼻端可以安装定制的应用模块来作为产品的功能拓展,安装不同的功能的末端执行器,可在不同的应用场景中完成相应工作。 ①图像传输模块:基于数字技术的图传系统可以使得该设备应用于复杂环境或狭窄环境下进行图像拍摄、图像传输、图像识别等功能。效果如下图2.1.6所示。
图2.1.6图像传输功能实现 ②其他功能模块:该作品可以根据客户需求进行二次开发,对象鼻鼻端部分更换模块,来实现不同的工作,例如在自然生态环境的修复改良作业、河海流域浮游垃圾的生态清理作业、复杂军事野战中越障侦察作业、抗震救灾现场被困人员的搜救工作以及传染病疫情环境的病毒消杀工作等。 2.仿生象鼻的运动过程
3.工作流程图
三、性能的分析与计算 1.气动系统元器件的选型 (1)8路5V继电器 继电器具有高寿命,高可靠,成本低,体积小的优点。结合本作品所需要的气路控制通道和功能,使用8路5V继电器来对本作品的充放气进行控制,参数如表4-1所示,外观如图4.1.1所示。 表4-1 8路5V继电器 型号 静态电流 MAX负载 响应时间 8路5V、12V 5mA AC250V/10A 0.05s
图4.1.1 8路5V继电器实物图 (2)空气压缩机 本作品所使用的气囊许用的工作气压最大值约为0.2Mpa,为了保证所有的气囊的连续使用要求,我们选择使用了无油空气压缩机。空气压缩机的使用方法是先给空气压缩机进行供电,等待空气压缩机的储气罐充满高压空气后再打开前端的手动阀门进行充气,气囊在消耗储存气体的过程中,储气罐内压力下降到了某一个数值后,空气压缩机会自动的给储气罐进行充气。空气压缩机的参数如表4-2所示。外观如图4.1.2所示 表4-2 无油空气压缩机 容积 最大排气压力 净重 公称容积流量 排气口含油量 8L 0.7Mpa 16kg 40L/min 无油
图4.1.2 无油空气压缩机实物图 (3)气动系统附件选型 整个气动系统还需要气管,直通变径接头,开关等配件。因为气囊与压缩机的进气口和出气口分别为6mm、8mm管道通路,为了减少损失,我们使用了直通变径接头来进行管道通路的切换,电磁阀与继电器也选择使用了6mm的通气口。气动系统附件选型如表4-3所示。 表4-3 气动系统附件 名称 型号 名称 型号 气管 PU6 PU8 节流阀 PSA8 变径接头 PG8-6 PUG8-6 空气调压过滤器 GFR20006F1 (4)微型两位三通电磁阀 电磁阀具有外漏堵绝,内漏易控,使用安全的优点。微型电磁阀本身结构简单,价格也低,比起调节阀等其它种类执行器易于安装维护。更显著的是所组成的自控系统简单得多,价格要低得多。这个电磁阀在通电状态下,1孔和2孔导通,3孔被封堵;断电状态下1孔和3孔导通,2孔被封堵。该两位三通电磁阀性能如表4-4所示,外观如图4.1.3所示。 表4-4 两位三通电磁阀 型号 额定电压 功率限制 压力范围 两位三通电磁阀 DC 6V |










【本文地址】