|
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
物理应用 机器学习
🔥 内容介绍
1. 概述
雷达测距是利用电磁波的传播特性来测量目标距离的一种技术,在各个领域都有着广泛的应用。其中,调频连续波FMCW雷达因其高精度、高分辨率、抗干扰能力强等优点,近年来得到了越来越多的关注。本文将详细介绍基于调频连续波FMCW的雷达测距原理、系统组成、关键技术以及应用领域。
2. FMCW雷达原理
FMCW雷达的工作原理是发射频率随时间线性变化的连续波信号,并接收目标反射信号。通过发射信号和接收信号之间的频率差,可以计算出目标距离。
具体来说,FMCW雷达发射的信号频率随时间线性变化,其频率变化速率称为调频斜率。目标反射信号的频率也随时间线性变化,但其频率变化速率与发射信号的频率变化速率不同。两者之间的频率差称为拍频频率,与目标距离成正比。
3. FMCW雷达系统组成
FMCW雷达系统主要由以下几个部分组成:
发射机: 产生频率随时间线性变化的连续波信号。 接收机: 接收目标反射信号并与发射信号进行混频,得到拍频信号。 信号处理单元: 对拍频信号进行处理,提取目标距离信息。 天线: 用于发射和接收电磁波。
4. FMCW雷达关键技术
FMCW雷达的关键技术包括:
高精度频率合成技术: 确保发射信号的频率变化准确稳定。 高灵敏度接收技术: 提高接收信号的信噪比,提高测距精度。 数字信号处理技术: 对拍频信号进行精确测量和分析,提取目标距离信息。
5. FMCW雷达应用领域
FMCW雷达在各个领域都有着广泛的应用,主要包括:
汽车自动驾驶: 用于探测前方障碍物,实现自动刹车、车道保持等功能。 无人机避障: 用于探测周围障碍物,实现无人机安全飞行。 工业过程控制: 用于测量物料液位、距离等参数,实现自动化控制。 医疗诊断: 用于测量人体组织的厚度、血流速度等参数,辅助疾病诊断。 气象观测: 用于探测云层高度、降水量等气象参数,提高气象预报精度。
6. 总结
基于调频连续波FMCW的雷达测距技术具有精度高、分辨率高、抗干扰能力强等优点,在各个领域都有着广泛的应用前景。随着技术的不断发展,FMCW雷达的应用范围将会更加广泛,为人类社会带来更大的便利。
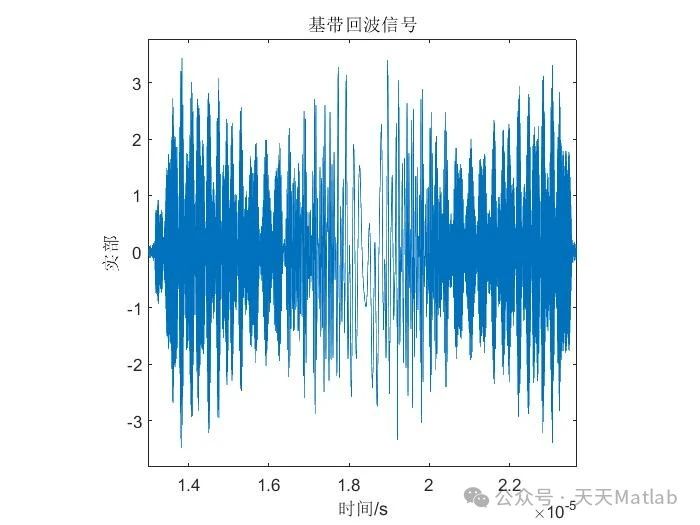
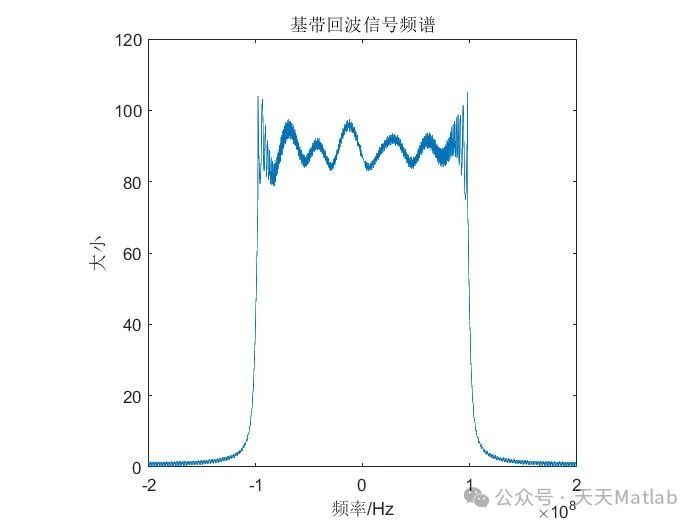
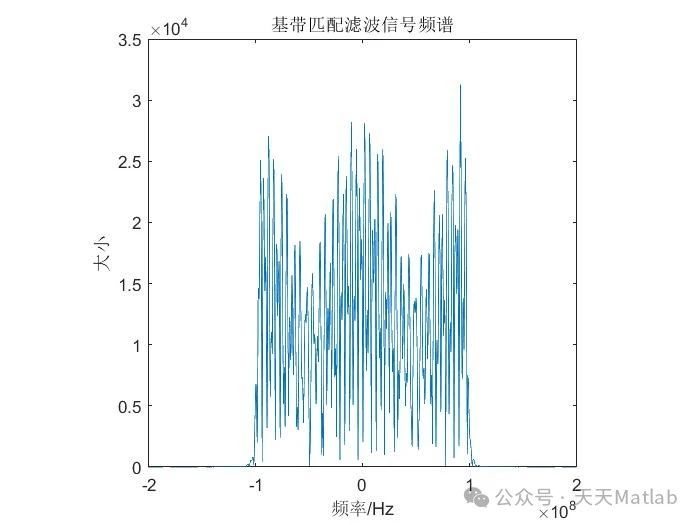
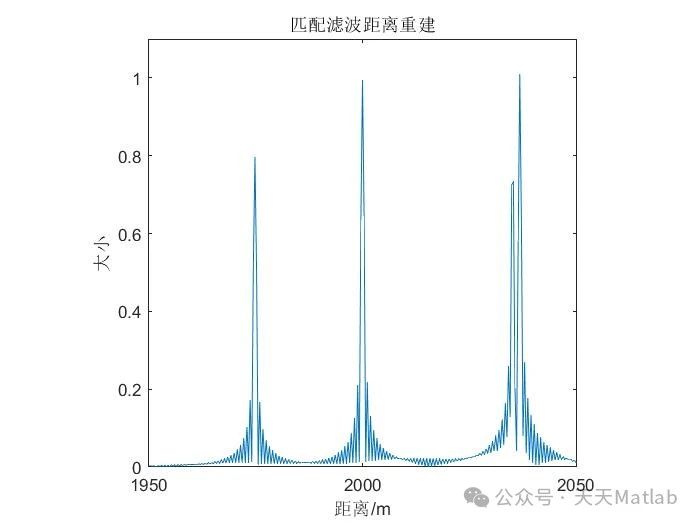
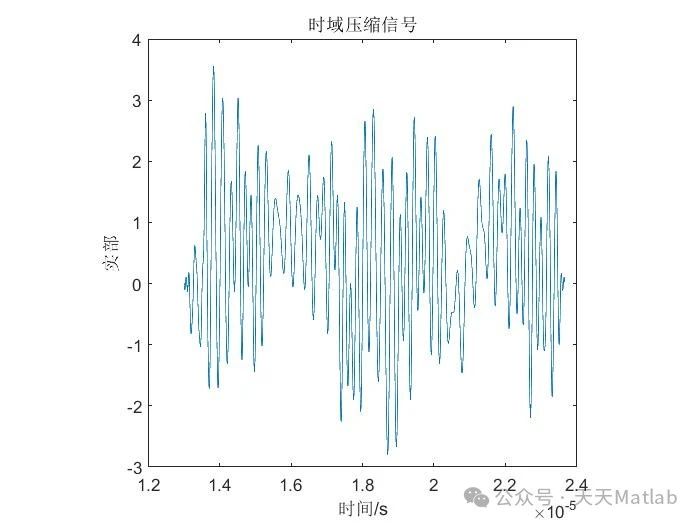
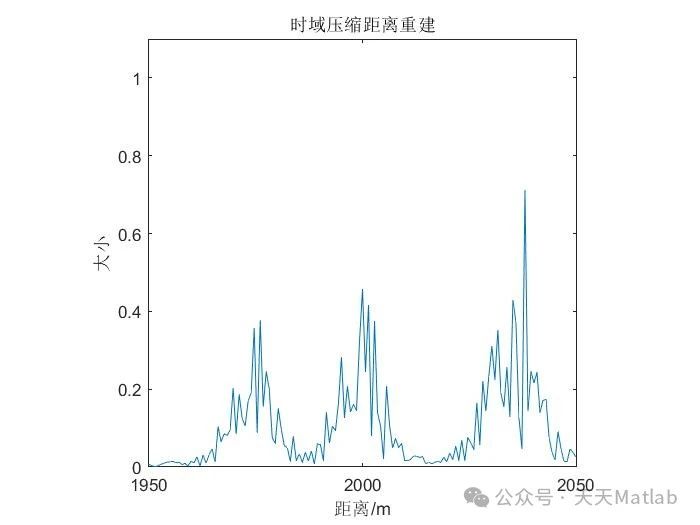
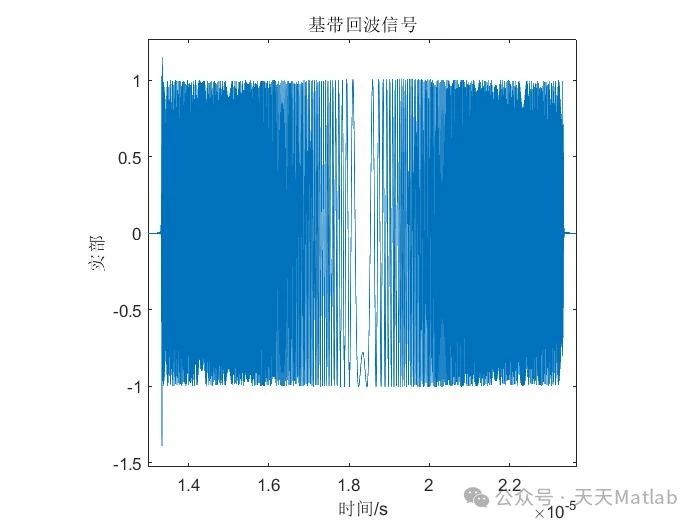
⛳️ 运行结果

📣 部分代码
clear all;close all;clc; addpath('./funcs');%% DeclearNt = 2; % number of transmit antennasNr_UCA = 24; % UCANr_ULA = 4; % UCyANr = Nr_UCA * Nr_ULA; % ULAL = 1; % Channel orderd_H = 4; % Number of propagation pathsPxp = 1;K = 64; % OFDM subcarriersF = dftmtx(K);FL = F(:,1:L);sigmax2 = 1; loop = 1000;SNR = -10:5:20;I_D_f = {};for snr_i = 1:length(SNR) I_D_f{snr_i} = gather(getfield(load(['./I_D/SNR_' num2str(SNR(snr_i)) '.mat']), 'I_D'));end%% Generate position of elements in arraysd_ULA_nor = 0.5;d_UCA_nor = 0.5;R_nor = 0.5 * d_UCA_nor/sin(pi/Nr_UCA);ULA_elements_nor = zeros(3, 1, Nr);UCyA_elements_nor = zeros(3, Nr_ULA, Nr_UCA);for Nr_index=1:Nr ULA_elements_nor(1, 1, Nr_index) = (Nr_index-1) * d_UCA_nor; ULA_elements_nor(2, 1, Nr_index) = 0; ULA_elements_nor(3, 1, Nr_index) = 0;endfor Nr_ULA_index=1:Nr_ULA for Nr_UCA_index=1:Nr_UCA UCyA_elements_nor(1, Nr_ULA_index, Nr_UCA_index) = R_nor * sin((Nr_UCA_index-1)*(2*pi/Nr_UCA)) ; % x UCyA_elements_nor(2, Nr_ULA_index, Nr_UCA_index) = R_nor * cos((Nr_UCA_index-1)*(2*pi/Nr_UCA)) ; % y UCyA_elements_nor(3, Nr_ULA_index, Nr_UCA_index) = (Nr_ULA_index-1) * d_ULA_nor; % z endend%% Signal Generation% we use the Zadoff-Chu sequencesU = 1:2:100;ZC_p = [];for u = 1 : Nt for k = 1 : K ZC(k,u) = sqrt(Pxp) * exp( ( -1i * pi * U(u) * (k-1)^2 ) / K ); end ZC_p = [ZC_p; ZC(:,u)];endX = [];for ii = 1 : Nt X = [X diag(ZC(:,ii))*FL];endgamma_f = {};AOA_f = {};ZOA_f = {};CRB_SB_ULA_f = [];CRB_SB_ULA_spec_f = [];CRB_SB_UCyA_f = [];CRB_SB_UCyA_spec_f = [];for t = 1:loop tic fprintf('Working at: %d iters.\n', t); %% Channel generation gamma = zeros(d_H, Nt); % complex gain ZOA = zeros(d_H, Nt); % ffset ZOA ray AOA = zeros(d_H, Nt); % offset AOA ray for nt = 1 : Nt gamma(:, nt) = sqrt(0.5)*(normrnd(0,1,1,d_H) + 1j*normrnd(0,1,1,d_H)); while min(abs(gamma(:, nt))) |